Че/пвертыч .1
Изобретение относится к электротехнике, в частности к моментным электродвигателям с неограниченным углом поворота ротора, и может быть использовано в прецизионных электроприводах с жесткой стабилизацией положения оси ротора в пространстве, от которых требуется повышенный ресурс работы.
Целью изобретения является повышение надежности и плавности хода при сохранении жесткой стабилизации оси ротора в пространстве и минимуме потерь в обмотке якоря путем создания электромагнитной силы, компенсирующей силу тяжести ротора и разгружающей подшипники.
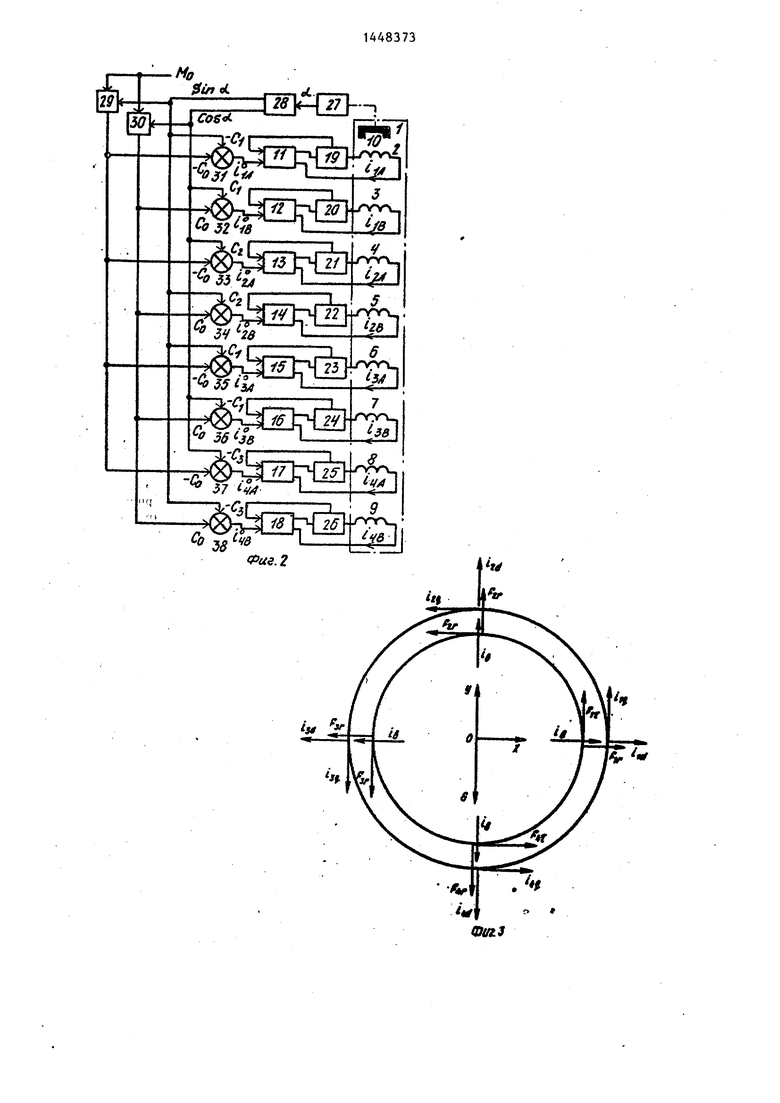
На фиг. 1 схематически показан электромеханический преобразователь (ЭМП), сечение; на фиг. 2 - функциональная схема моментного вентильного электродвигателя; на фиг. 3 - направления тангенциальных и радиальных сил, а также продольные и поперечны составляющие токов четырех секторов обмотки якоря.
ЭМП 1 на фиг, 1 имеет на статоре двухфазную обмотку якоря, разделенную на четыре сектора с фазами 2, 3, 4, 5, 6, 7, 8, 9 соответственно и ротор-индуктор 10. Каждый сектор занимает 90 геометрических градусов. Первый и третий секторы - боковые, второй сектор - верхний, четвертый се- ктор - нижний. Пумерадия секторов соответствует положительному направлению вращения.
Число р пар полюсов ротора-индуктора 10 делится на четыре (на фиг. 1 р 8). Фазы 3, 5, 7, 9, именуемые фазами В, сдвинуты .относительно фаз 2, 4, 6, 8, именуемых фазами А, на 90 эл. град, в положит тельном направлении. Один сектор об- мотки якоря образует р/2 полюсов (на фи-г. J показано четыре полюса). Крестиками и точками показаны положительные направления токов фаз. Фазы А, В, расположенные на различных секторах, имеют автономное питание, поэтому можно считать, что обмотка якоря имеет восемь фаз.
Моментный вентильный электродвигатель (фиг. 2) содержит также восемь усилителей мощности 11-18, восемь датчиков тока 19-26, датчик угла 27, синусно-косинусный функциональный преобразователь 28, два пе
с 0
5
0 5
О c
0 з «
5
ремножителя 29ед 30, восемь сумматоров 31-38.
Ротор-индуктор 10 мехалически связан с ротором датчика угла 27, выход которого подключен ко входу синусно- косинусного функционального преобразователя 28 и образует вместе с ним синусно-косинусный преобразователь угла. Его синусный выход подключен ко входам сумматоров 31, 34, 35, 38 и входу перемножителя 28, а косинусный выход подключен ко входам сумматоров 32, 33, 36, 37 и перемножителя 30. Вторые входы перемножителей 29, 30 являются входами электродвигателя, а их выходы подключены ко вторым входам соответственно сумматоров 31, 33, 35, 37 и 32, 34, 36, 38. Выходы сумматоров 31-38 подключены ко входам усилителей мощности 11-18, выходы которых соединены с фазами 2-9 обмотки якоря через датчики тока 19- 26, выходы которых подключены ко вторым инвертирукщим входам усилителей мощности 11-18 соответственно и образуют восемь каналов формирования якорных токов.
На фиг. 3 показаны горизонтальная X и вертикальная Y оси, сила тяжести G, действующая на ротор-индуктор, тангенциальные силы F, F, F, и радиальные силы F,fv , F,, , . . Представлены эквивалентные токи возбуждения ротора-индуктора ig , а также продольные if , . За, 4d. поперечные i , i, i , i составляющие систем токов секторов с первого по четвертьй обмотки якоря. Токи возбуждения и продольные составляющие токов якоря изображены совпадающими по направлению с радиальными силами, а поперечные составляющие токов якоря - с тангенциальными силами, которые они создают.
Электродвигатель работает следующим образом.
Датчик угла 27 вырабатывает сигнал, соответствующий текущему углу о( поворота ротора-индуктора 10. Этот сигнал поступает на вход функционального преобразователя 28, вырабатывающего сигналы sin о( и cos «i . Они поступают на входы сумматоров 31-38, а также соответственно на входы перемножителей 29 и 30. На их вторые входы поступает сигнал, пропорциональный требуемому электромагнитному моменту М(з, а выходные сигналы
. i,/ -( + C)sin, . i g (С„М„ + С, )CQS,,
. . 1
SA
C.J cos« - , -(1)
31448373
MjSin. МдСОЗо/ поступают на вторыесвязью с помощью датчиков тока 19входы сумматоров 31-38.26, обеспечивают протекание по фа.. .. . 2 обмотки якоря токов i;. , ,
На выходах Сумматоров 31-38 фор-i 4 гд ЗА Зв л 4е близких
мируются оптимальные значения токовк оптимальным.
фаз обмотки якоря согласно равенст-Токи (1) обеспечивают создание
вам:тангенциальных и радиальных сил, действующих на ротор, сумма моментов ко- 0 торых относительно оси вращения равна требуемому моменту М, при минимальных потерях в обмотке якоря. Сумма проекций сил на ос.ь X близка к нулю, а сумма проекций сил на ось X 15 равна силе тяжести G ротора-индуктора, благодаря чему подшипники разгружаются от этой силы, повышается надежность электродвигателя и плавность хода за счет снижения момента трения 20 в подшипниках.
Равенства (1) получаются в результате решения задачи на условный экстремум с тремя ограничениями типа равенства методом множителей Лангран- где Cfff С, , Cg, Сз - постоянные коэф- 25 жа: найти токи i, , 1щ , , i, фициенты. Усилители мощности 11-18, Ы 4 } Удовлетворяющие охваченные глубокой отрицательнойсоотношениям:
I
V 1 +1 + i + i +1 + i + i -f 12 s ьм/1л С 9 V1.J 2Л 2 J3rf3 4d д. U
. + Cgllgcos,
.0
«-«, - :,и„)8ш., ,
CjCos«( -
4S .,
« ( - C|) COS./.
. , C coBti - CgligSinef,

| название | год | авторы | номер документа |
|---|---|---|---|
| Моментный вентильный электродвигатель | 1988 |
|
SU1624617A1 |
| Моментный вентильный электродвигатель | 1989 |
|
SU1742949A2 |
| Моментный электродвигатель постоянного тока с ограниченным углом поворота | 1990 |
|
SU1757038A1 |
| Моментный вентильный электродвигатель | 1988 |
|
SU1642558A1 |
| Моментный вентильный электродвигатель | 1989 |
|
SU1734172A1 |
| Моментный электродвигатель постоянного тока | 1988 |
|
SU1629949A1 |
| Устройство для настройки моментного вентильного электродвигателя | 1987 |
|
SU1515273A1 |
| Устройство для настройки моментного вентильного электродвигателя | 1989 |
|
SU1774454A1 |
| Устройство для настройки моментного вентильного электродвигателя | 1987 |
|
SU1580495A1 |
| Моментный вентильный электродвигатель | 1989 |
|
SU1742950A1 |
Изобретение относится к электротехнике, в частности к моментным вентильным электродвигателям (МВД) с неограниченным углом поворота, и может быть использовано в прецизионных электроприводах с жесткой стабилизацией положения оси ротора в проТреаиа странстве, от которых требуется повышенный ресурс работы. Целью изобретения является повышение надежности МВД и плавности хода при сохранении стабильности электромагнитного момента и жесткой стабилизации оси ротора в пространстве. Обе фазы А и В якорной обмотки делятся на четыре равных сектора в пространстве и образуют восемь фаз 2-9. Фазы якорной обмотки . вместе с датчиками тока 19-26, усилителями мощности 11-18 и сумматорами 31-38 образуют весемь каналов формирования якорных токов. Токи в каналах формируются при помощи связей с перемножителями напряжения 29, 30 и синусно-косинусным функциональным преобразователем 28 из условия создания стабильного электромагнитного момента и электромагнитного усилия, компенсирующего силу тяжести ротора при минимуме потерь в якорной обмотке. 3 ил. Л « СП с: В/порой 4ib 00 00 оа №р&й
,f . brf) - i. 0
V a, i
- - й + i,) - G О (4)
V.
- Ы
Условие (2) cooTBeTCTByet минимуму потерь в обмотке якоря, равенства (3), (4) Соответствуют равновесию приложенных к ротору-индуктору сил, а равенство (5) соответствует получению требуемого электромагнитного момента а,, а, а - постоянные коэффициенты. В равенствах (3), (4) не учтены составляющие радиальных си от поперечных составляющих систем токов якоря.
Функция Лангранжа и условия ее стационарности по токам имеют вид:
.V o,5v -л,у„ -.v,
|Ь 2а,Я, (i, 1,) 0
LU
i - (1 + )
isd- (i Ь.) 0
(3)
(5)
fb
|г: Ч о
id.
li;; .а--Л--а V о
sv
- Ч - Нэ о
о
3
3V
so ч
откуда получаем:
i - ад Л, -
55
i
-1-2а Лг
i
211-2a,
i 2a.
3- Ц-2а г
+
1г, , - . Ы
3-4 з
Складывая последние четьфе равенства, получаем:
4я2 л м я И --2- , м, ,-
Подставляя токи i , i,/ , i , в равенство (3), получаем:
Л О, i, 0. 1з О Мно5китель от М не зависит. о Обозначая
4а5 г - 2a. „ 2 1-2а, 3 ц-2а/ э
получаем равенства:
i/4 О i С Cf
С М - С,
ZcL 2 -2
dd
. -Сз. i- С, М„(6)
С, С , С, Cj о с помощью известных формул i - igsinol. i i sinct + iqcoso(
из равенства (6) получаем равенство (1).
Синусно-косинусный преобразователь угла может быть выполнен в вид синусно-косинусного вращающегося трансформатора и двух фазочувствите льных вьтрямителей. Перемножители и
14483736
сумматоры могут быть выполнены на интегральных микросхемах из серийно выпускаемых никропроцесЬорных комп- лектов.
0
5
0
5
0
5
0
5
0
5
Форм-ула изобретения
Моментный вентильный электродвигатель, содержащий синхронную злектри- ческую машину с обмоткой якоря на статоре и ротором-индуктором, механически связанным с валом синусно-косинусного преобразователя угла, синусный и косинусный выходы которого соединены с первыми входами первого и второго пе- ремножитепей, и каналы формирования якорных токов, каждый из которых состоит из сумматора, выход которого подключен к неинвертирующему входу усилителя мощности, а к его инвертирующему входу подключен выход датчика тока, через вход которого к выходу усилителя мощности подключены фа- за Якорной обмотки и вход задания момента, отлич ающийся тем, что, с целью повышения надежнос- № и плавности хрда, якорная обмотка размещена на четырех равных секторах, каждьм из которых занимает 90 геометрических градусов, на казвдом секторе расположены две фазы обмотки якоря, образуя на всех секторах с первой по восьмую фазы .; фазы с четными номерами, сдвинутые в сторону опережения, по направлению вращения относительно фаз с нечетными номерами, на 90 зл. град, выход первого перемножителя подключен к первым входам сумматоров. первого, третьего и пятого и седьмого каналов, выход второго перемножителя подключен к первым входам сумматоров второго, четвертого, шестого и восьмого каналов, синусный выход синусно- косинусного преобразователя угла подключен к вторым входам сумматоров первого, четвертого, пятого и восьмого каналов, косинусный выход синусно-косинусного преобразователя угла подключен к вторым входам сумматоров второго, третьего, шестого и седьмого каналов, на роторе - индукторе число пар полюсов кратно четырем, вторые входы перемножителей соединены с входом задания момента.
Со
Ъ8
Фаз. 2
tM
fit
.
о
| Электродвигатель | 1978 |
|
SU748702A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электродвигатель-маховик с электромагнитным подвесом ротора | 1981 |
|
SU964883A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Моментный вентильный электродвигатель | 1984 |
|
SU1171916A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
