Изобретение относится к электротехнике и может быть использовано в прецизионных моментных электроприводах с неограниченным углом поворота ротора.
Целью изобретения является улуч- шение динамических характеристик путем компенсации влияния демпфирующего действия вихревых токов.
На фиг. 1 изображена функциональная схема моментного вентильного электродвигателя j на фиг. 2 - фазы обмотки реальной и обобщенной электрической машины и их НДС.
Моментный вентильный электродвигатель содержит сихронную машину 1 с синусной 2 и косинусной 3 фазами обмотки якоря, датчик 4 угла, ротор которого механически связан с ротороминдуктором 5 синхронной машины 1, первый 6 и второй 7 усилители мощности. Выходы усилителей 6, 7 подключены соответственно к синусной 2 и косинусной 3 фазам обмотки якоря через датчики 8, 9 тока, выходы которых подключены к инвертирующим входам усилителей 6, 7 соответственно. Электродвигатель кроме того содержит первый 10 и второй 11 алгебраические сумматоры, первый 12 -и второй 13 основные перемножители.
Дополнительно электродвигатель содержит датчик 14 частоты вращения, первый 15 и второй 16 датчики напряжения, первый 17 и второй 18 преобразователи координат, четыре дополнительных алгебраических сумматора 19-22, шесть дополнительных перемно31642558
жителей 23-28, два интегратора 29, 30 и операционный усилитель 31. Первый вход усилителя 31 образует вход задания момента. Датчик 14 частоты вращения механически связан с ротором-индуктором 5. Выход датчика 4 угла подключен к управляющим входам первого 17 и второго 18 преобразо- вателей координат, а выход--датчика 14 частоты вращения - к первому входу первого дополнительного сумматора 19 и к первым входам первого 23, второго 24, третьего 25 и четвертого 26
10
1 1
входу четвертого дополнительного сумматора 22, Выход сумматора 22 подключен к второму входу пятого дополнительного перемножителя 27, выход которого подключен к вторым входам первого 10 и второго 11 сумматоров,и t первого дополнительного перемножителя 23, пятому входу второго дополнительного сумматора 20 и к первому информационному входу первого преобразователя( 17 координат. Выход второго сумматора 11 подключен ко второму входу шестого дополнительного перемножителя 28, вы

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для настройки моментного вентильного электродвигателя | 1987 |
|
SU1515273A1 |
| МОМЕНТНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2000 |
|
RU2192705C2 |
| Моментный электродвигатель постоянного тока с ограниченным углом поворота | 1990 |
|
SU1757038A1 |
| Моментный вентильный электродвигатель | 1987 |
|
SU1448373A1 |
| Моментный вентильный электродвигатель | 1988 |
|
SU1624617A1 |
| Моментный вентильный электродвигатель | 1989 |
|
SU1742950A1 |
| Устройство для настройки моментного вентильного электродвигателя | 1987 |
|
SU1580495A1 |
| Моментный вентильный электродвигатель | 1989 |
|
SU1742949A2 |
| Устройство для настройки моментного вентильного электродвигателя | 1989 |
|
SU1774454A1 |
| Моментный вентильный электродвигатель | 1989 |
|
SU1734172A1 |
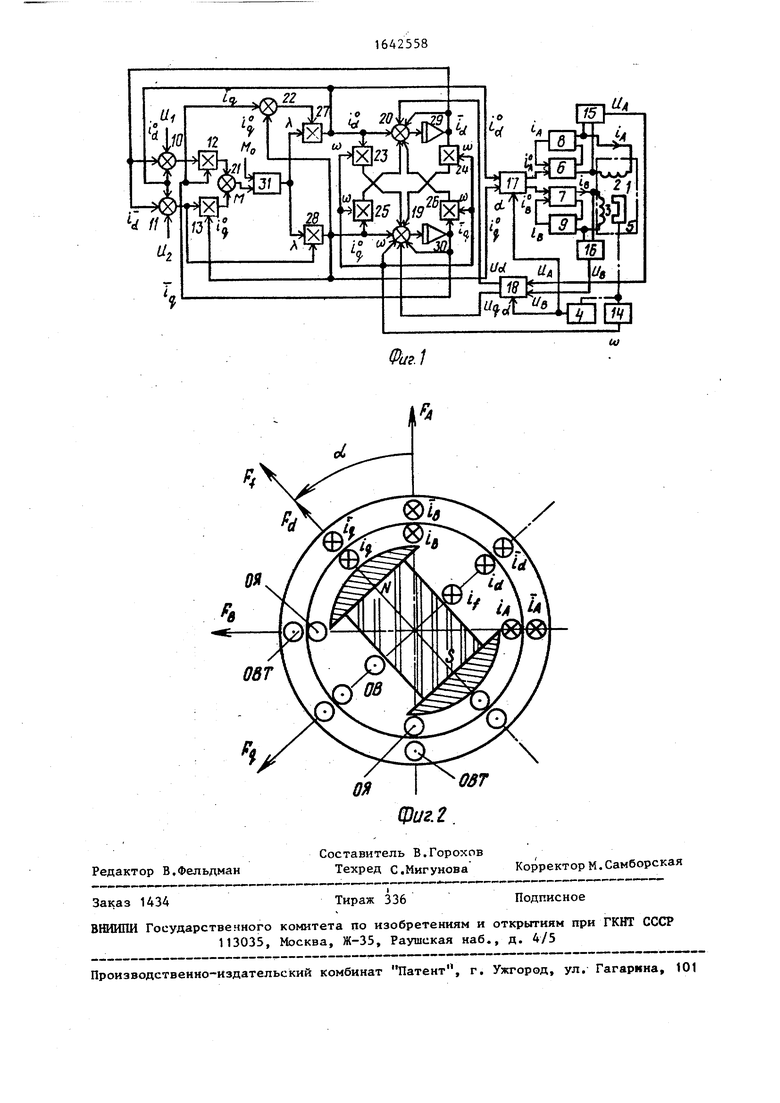
Изобретение относится к электротехнике и может быть использовано в прецизионных моментных электроприводах с неограниченным углом поворота ротора. Целью изобретения является повышение динамических характеристик путем компенсации влияния демпфирующего действия вихревых токов. Для достижения цели моментный вентильный электродвигатель дополнительно содержит датчик 14 частоты вращения, датчики 15, 16 напряжения фаз с|бмотки якоря, два преобразователя 17, координат, четыре алгебраических сумматора 19-22, шесть перемножителей 23-28, два интегратора 29, 30 и операционный усилитель 31. В вентильном электродвигателе обеспечивается моделирование вихревых токов в магнитопроводе статора и задание тока в фазах синхрон- О ной машины с учетом демпфирующего действия вихревых токов, 2 ил./Л
дополнительных перемножителей. Выходыf5 Х°Д которого подключен ко второму
35
первого 23 и второго 24 дополнительных перемножителей подключены ко второму и третьему входам первого дополнительного сумматора 19, а выходы третьего 25 и четвертого 26 дополни- 20 ,тельных перемножителей - к первому и второму входам второго дополнительного сумматора 20. Синусная 2 и косинусная 3 фазы синхронной машины подключены ко входам первого 15 и вто- 25 рого 16 датчиков напряжения соответственно. Выходы этих датчиков подключены к первому и второму информационным входам второго преобразователя
18координат. Второй и первый выходы од преобразователя 18 подключены соответственно к четвертому входу первого дополнительного сумматора 19 и к третьему входу второго дополнитель- ного сумматора 20. Выходы сумматоров
19и 20 подключены соответственно ко входам первого 29 и второго 30 интеграторов. Выход второго интегратора 30 подключен ко второму входу второго дополнительного перемножителя 24, к JQ четвертому входу второго дополнительного сумматора 20 и к первым входам первого 10 и второго 11 сумматоров. Выходы сумматоров 10 и 11 подключены
к первым входам первого 12 и второго 13 перемножителей соответственно, л а выходы перемножителей 12 и 13 под-, ключены ко входам третьего дополнительного сумматора 21. Выход сумматора 21 подключен ко второму входу операционного усилителя 31, выход которого подключен к первым входам пятого 27 и шестого 28 дополнительных перемножителей. Выход первого интегратора 29 подключен ко вторым входам первого 12 основного и четвер- того 26 дополнительного перемножителей, к пятому входу первого допол- нительного сумматора 19 и к первому
45
50
входу четвертого дополнительного с матора 22, шестому входу первого д полнительного сумматора 19, вторым входам второго - основного 13 и трет его дополнительного 25 перемножите и второму информационному входу пе вого преобразователя 17 координат. Выходы преобразователя 17 подключе ны к прямым входам первого 6 и вто го 7 усилителей мощности.
Первый и второй преобразовател координат 17, 18 соответственно ре ализуют зависимости
° / /
1д IjCOSfci -гретое,
ij i sinoi +Цсоз, Uj - UAcosai 4-и6 81по, -Uft sinci + U6cos tf,
1Ц
.0
где i
A
.0
lb
V Ч
In сигналы на выходе пер го преобразователя 17 соответствующие оптимальным значениям ток синусной 2 и косинусн 3 фаз обмотки якоря, сигналы на первом и в ром входах первого пр образователя 17 соотв ствующие оптимальным значениям токов продо ной и поперечной фаз мотки обобщенной элек ческой машины, . - напряжения фаз обмотк
якоря;
, Ue - сигналы на первом и в ром выходах второго п образователя 18, соот ствующие напряжениям дольной и поперечной обмотки обобщенной эл трической машины.
V и.
входу четвертого дополнительного сумматора 22, шестому входу первого дополнительного сумматора 19, вторым входам второго - основного 13 и третьего дополнительного 25 перемножителей и второму информационному входу первого преобразователя 17 координат. Выходы преобразователя 17 подключе- ны к прямым входам первого 6 и второго 7 усилителей мощности.
Первый и второй преобразователи координат 17, 18 соответственно реализуют зависимости
5
Q
5
0
° / /
1д IjCOSfci -гретое,
ij i sinoi +Цсоз, Uj - UAcosai 4-и6 81по, -Uft sinci + U6cos tf,
1Ц
.0
где i
A
.0
lb
V Ч
In сигналы на выходе первого преобразователя 17, соответствующие оптимальным значениям токов синусной 2 и косинусной 3 фаз обмотки якоря, сигналы на первом и втором входах первого преобразователя 17 соответствующие оптимальным значениям токов продольной и поперечной фаз обмотки обобщенной электрической машины, . - напряжения фаз обмотки
якоря;
, Ue - сигналы на первом и втором выходах второго преобразователя 18, соответствующие напряжениям продольной и поперечной фаз обмотки обобщенной электрической машины.
V и.
51642558
На третьи входы первого 10 и второго 11 сумматоров поданы постоянные сиг- налы напряжения Uj sPM ijHUg . Первые и вторые входы пер- , вого 10 и второго 11 основных и четвертого 22 дополнительного суммато-
т
н
ров имеют входные коэффициенты Ч.) V1
P(bd - у; РО - т).
Пятый, третий, четвертый, первый и второй входы второго дополнительного сумматора 20 имеют входные коэффициенты соответственно
P(Md ),
V
-м.
-Ц.
Ld4 - MAШестой, четвертый, пятый, второй, третий и первый входы первого дополнительного сумматора 19 имеют входные коэффициенты соответственно
V
, Нг
LdM« - 4V
- MdV (L4M MiW
Второй 30 и первый 29 интеграторы имеют входные коэффициенты
11
L4LA
- М
ss -м;
де Р - число пар полюсов синхронной машины 1,
i, - ток обмотки возбуждения ротора-индуктора или обмотки, эквивалентной постоянным магнитам;. М,М,- взаимные индуктивности между обмоткой возбуждения и продольными фазами обмотки обобщенной электрической машины, соответствующими обмотке якоря и контурам вихревых токов в магнитопро- воде статора,
i, Ья - индуктивности продольной и поперечной фаз обмоток обобщенной машины, соответствующих обмотке якоря и контурам вихревых то. ч
M
Mft ков,
взаимные индуктивности меж- ду продольными фазами и между поперечными фазами обмоток обобщенной машины, соответствующими обмотке
,
5
0
0
5
г,
якоря и контурам вихревых токов, г - активные сопротивления фаз
этих обмоток.
Вентильный электродвигатель работает следующим образом.
Датчик 4 угла вырабатывает сигнал об , равный углу поворота ротораQ индуктора 5 и поступающий на входы управления первого 17 и второго 18- преобразователей координат. Датчик 14 частоты вырабатывает сигнал СО , равный частоте вращения ротора-индуктора 5 и, поступающий на первый вход сумматора Т9, а также на первые входы перемножителей 23-26, вы ходные сигналы которых поступают на входы сумматоров 19, 20. Датчики 15, 16 напряжения вырабатывают сигналы, пропорциональные напряжениям и, U фаз 2, 3 обмотки якоря. Эти сигналы поступают на входы преобразователя 18 координат, на выходах которого
5 вырабатываются сигналы Uj, U«, равные напряжениям продольной и поперечной фаз обмотки статора обобщенной машины, соответствующих обмотке ОЯ, и поступающие на входы сумматоров 20, 19 соответственно. Выходные сигналы сумматоров 20, 19 поступают на входы интеграторов 30, 29, вырабатывающих сигналы ig, 1л, характеризующие токи продольной и поперечной фаз обмотки обобщенной машины, соответствующей обмотке с вихревыми токами.
Сигнал i « поступает на второй вход перемножителя 24, на вход сумматора 20 и на первые входы сумматоров 10, 11,выходные сигналы которых поступают на первые входы перемножителей 12, 13. Сумма их выходных сигналов, равная моменту
45
М - (Ij - ylj + (Mj - «- Mji
yi - V M + a - VM Vi3
(D
поступает с выхода сумматора 21, на второй вход операционного усилителя 31, на первый вход которого подается сигнал, равный требуемому электромагнитному моменту Мо. Операционный усилитель 31 вырабатывает сигнал, эквивалентный множителю Лагранжа ft и поступающий на первые входы перемножителей 27, 28.
Сигнал 1л поступает на второй вход перемножителя 26, на пятый вход сумматора 19, на второй вход перемножителя Т2 и на первый вход сумматора 22. Выходные сигналы сумматоров 22, 11 поступают на вторые входы пере- множителей 27, 28, на выходах которых формируют значения i, in токов продольной и поперечной фаз обмотки обоб ценной машины, соответствующей обмотке якоря, согласно равенствам .о
Ч PN: VV Г V,,$
(2)f
.о
i v1 +
+ М,О)
Сигнал ij поступает на пятый вход сумматора 20, на первый вход преоб- разователя 17 координат, на вторые входы перемножителя 23 и суммато- , ров 10, 11, на третьи входы кото- рых подаются сигналы 1Ц в и и2 РМ.0
Сигнал in поступает на вторые входы перемножителей 13, 25, сумматора 22, преобразователя 17 координат и на шестой вход сумматора 19..
На выходах преобразователя 17 координат формируются оптимальные значения i, i| токов синусной 2 и косинусной 3 фаз обмотки якоря, поступающие на входы усилителей 6, 7
мощности, которые питают фазы 2,
. О . 4
3 токами it
lg С ПОМОЩЬЮ
датчиков 8, 9 тока. В результате син хронный электродвигатель 1 развивает требуемый электромагнитный момент М М0 при минимальных потерях в обмотке якоря с учетом вихревых токов в магнитопроводе статора.
Сумматоры 19, 20, интеграторы 29, 30 И перемножители 23-2Ј формируют текущие значения токов ij, Г, согласно системе дифференциальных уравнений
$ я -МЛ + Mdrid + (1Л -
-ЩфОЦ- L,tid + (LaL%- MdVQ4/(L - ф
if -м +м, - -MdVQl j MiV ),
вытекающий из известных систем дифференциальных уравнений для обобщенной электрической машины
uj + Ldi +м - W
- ЧСЛ,
- S+ Ч#+ м + W +
+ + .j; u. 7 Й2 л. м-liiJ
Ld + L«JdF + MdlF ЧШН
0 rij + L + M,- - UWL, - ,
° гч sM +
+ M ,COij .
Сумматоры 10, 11, 21, 22, перемножители 12, 13, 27, 28 и операционный усилитель 31 вырабатывают опти- малыше значения токов ij, i( cor- t ласно формулам (2), (3), которые получаются в результате решения методом множителя Лагранжа задачи на условный экстремум-найти токи i i, 1„, минимизирующие мощность потерь в обмотке якоря и обеспечивающие требуемый электромагнитный момент
Ч
f 2 i ч
r(ij + i.) mm,
и V
М,
M(id iV V i ™«i где момент М определяется равенством (1), следующим из известной формулы для электромагнитного момента обобщенной электрической машины с одной обмоткой на статоре
где (j j, - потокосцепления продоль- ной и поперечной фаз обмотки статора.
Таким образом, формирование токов в секциях обмотки якоря электрической машины с учетом компенсации демпфирующего действия вихревых токов позволяет повысить динамические характеристики моментного вентильного электродвигателя. Конкретная реализация , схемы формирования токов обеспечивает
достижение высоких динамических свойств при минимизации мощности пот- терь в обмотке якоря.
Формула изобретения
Моментный вентильный электродвигатель, содержащий синхронную машину с синусной и косинусной фазами обмотки якоря, датчик угла, ротор которого механически связан с ротором-индуктором синхронной машины, первый и второй усилители мощности, выходы которых подключены соответственно к си- нусной и косинусной фазам обмотки якоря через датчики тока, выходы которых подключены к инвертирукяцим входам соответствующих усилителей мощности, первый и второй алгебраические сум- маторы, первый и второй перемножители отличающийся тем, что, с целью улучшения динамических характеристик путем компенсации влияния демпфирующего действия вихревых токов, введены датчик частоты вращения, первый и второй датчики напряжения, пер вый и второй преобразователи координат, четыре дополнительных алгебраических сумматора, шесть дополнительны перемножителей, два интегратора и операционный усилитель, первый вход которого образует вход задания момента, датчик частоты вращения механически связан с ротором-индуктором, выход датчика угла подключен к управляющим входам первого и второго преобразователей координат, а выход датчика частоты вращения - к первому входу первого дополнительного сум- матора и к первым входам первого, второго, третьего и четвертого дополнительных перемножителей, выходы первого и второго дополнительных перемножителей подключены ко второму и третьему входам первого дополнительного сумматора, а выходы третьего и четвертого дополнительных пе- ремножителей - к первому и второму
ВХОДаМ ВТОРОГО ДОПОЛНИТеЛЬНОГО СУМ-
матора, синусная и косинусная фазы обмотки якоря подключены ко входам соответственно первого и второго датчиков напряжения, выходы которых подключены к первому и второму инфор- мационным входам второго преобразователя координат, второй и первый выходы которого подключены соответственно к четвертому входу первого
дополнительного сумматора и к третьему входу второго дополнительного сумматора, выходы которых подключены соответственно ко входам первого и второго интеграторов, выход второго интегратора подключен ко второму входу второго дополнительного перемножителя, к четвертому входу второго дополнительного сумматора и к первым входам первого и второго сумматоров, выходы которых подключены к первым входам первого и второго перемножителей соответственно, а их выходы подключены ко входам третьего дополнительного сумматора, выход которого подключен ко второму входу операционного усилителя, выход операционного усилителя подключен к первым входам пятого и шестого дополнительных перемножителей, выход первого интегратора подключен ко вторым входам первого основного и четвертого дополнительного перемножителей, и пятому входу первого дополнительного сумматора и к первому входу четвертого дополнительного сумматора, выход которого подключен ко второму входу пятого дополнительного перемножителк выход которого подключен к объединенным вторым входам первого и второго сумматоров, второму входу первого Дополнительного перемножителя, пятому входу второго дополнительного сумматора и к первому информационному входу первого преобразователя координат, выход второго сумматора подключен к второму входу шестого дополнительного перемножителя, выход которого подключен ко второму входу четвертого дополнительного сумматора, шестому входу первого дополнительного сумматора, вторым входам второго j основного и третьего дополнительного перемножителей и второму информационному входу первого преобразователя координат, выходы которого подключены к прямым входам первого и второго усилителей мощности, причем первый и второй преобразователи координат соответственно реализуют зависимости
оол
ijcosoi- i-simx,
ijsinoi- , J
идcosed+ U8sincx, j
Uftsinp i+ UBCOS oi J у
11
третьи входы первого и второго сум- | маторов подключены к источникам опорных сигналов с выходными апряжени- , ями, соответственно U,t « РНД| и U$ « , первый, второй основные и четвертый дополнительный сумматоры i выполнены по первому и второму входам с входными коэффициентами соответственно
- v
- М) - ty ,
P(Md - М) j PCLj - ty j
PCLj-ty;
15
20
второй дополнительный сумматор выполнен по пятому, третьему, четвертому; первому и второму входам с входными коэффициентами соответственно
Md Ld r LdM
LcJLH MdMV первый дополнительный сумматор выполнен по шестому, четвертому, пятому, второму, третьему и первому входам с 5 входными коэффициентами соответственно
30
35
мфг Ц L(f LJM(J - L
(ЬЛ - MdV (Sfft м|м|)
второй и первый интеграторы имеют входные коэффициенты соответственно
11
ЪЛ -ом5 УЧ - М5
где ift, ie - сигналы на выходах первого преобразователя координат, соответствую- U0 щие оптимальным значени- . ям токов синусной и коси-., нусной фаз обмотки якоря, ij i. - сигналы на первом и вто-, ром входах первого преоб-., разователя координат,
642558
, i
10
15
20
5
30
35
U0-., , , -., ч
и,, в,
V
м
р ч |,МЈ LJ.
г
v ч 12 ,
ответствующие оптимальным значениям токов продольной и поперечной фаз об- / мотки обобщенной электри- ческой машины, 1 напряжения фаз обмотки якоря,
сигналы на первом и втором выходах второго преобразователя координат, соответствующие напряжениям продольной и поперечной фаз обмотки обобщенной электрической машины, число пар полюсов синхронной машины, ток эквивалентной обмотки возбуждения ротора- индуктора,
взаимные индуктивности между обмоткой возбуждения и продольными фазами обмоток обобщенной электрической машины, соответствующих обмотке якоря и контурам вихревых токов в магнито- проводе статора,
1
индуктивности продольной и поперечной фаз обмоток обобщенной машины, соответствующих обмотке якрря и контурам вихревых тиков, взаимные индуктивности между продольными фазами и между поперечными фазами обмоток обобщенной машины, соответствующих обмотке якоря и контурам вихревых токов, активные сопротивления .фаз этих обмоток.
Фиг.1
/
ОдТ
| Столов Л.И | |||
| и др | |||
| Авиационные моментные двигатели | |||
| М.: Машиностроение, 1979, с.58-60 | |||
| Моментный вентильный электродвигатель | 1985 |
|
SU1277308A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
