tis
ел
СП
со
Изобретение относится к электротехнике и может .быть использовано в автоматизированном электроприводе с контролируемым диапазоном скоростей.
Цель изобретения - повьппение надежности.
На чертеже приведена схема электропривода постоянного тока.
Электропривод постоянного тока содержит двигатель 1 последовательно соединенные источник 2 задающего напряжения, регулятор 3 скорости, регулятор 4 тока, нелинейное звено 5 типа насьицення, логическое устройство 6 раздельного управления, систему 7 импульсно-фазового управления, ти- ристорный преобразователь 8, выходом подключенный к якорной обмотке двигателя 1 , датчики 9 и 10 тока и скорости подключенные к входам соответствующих регуляторов % и 3, функциональный преобразователь ЭДС 11, вход которого подключен к датчику 10 скорости, а выход - к второму входу нелинейного звена 5 типа насыщение, входы питания логического устройства 6 раздельного управления соединены с шинами питания, два друг гих входа соединены соответственно с выходами тиристорного преобразовате ля 8 и выходом блокировки системы 7 импульсно-фазового управления, входы коммутации которой соединены с дискретными выходами логического устрой- ства 6 раздельного управления, выход совпадения которого соединен с входом блокировки системы 7 импульсно-фазового управдС-Ния,источник Ь2 опорного напряжения, влок 13 выделения модуля, управл-яемый ограничитель 14 скорости, а источник 2 задающего напряжения выполнен с дополнительньми входами, при этом сигнальный вход управляемого
ь
Ограничителя 14 скорости соединен с выходом блока 13 выделения модуля, вход которого соединен с выходом датчика 10 скорости, пороговые входы управляемого ограничителя 14 скорости соединены с соответствующими вы- ходами источника 12 опорного напряжения, входы коммутации - с дискретными выходами логического устройства 6 раздельного управления, а аналоговые выходы - с соответствующими дополни- тельными входами источника 2 задающег го напряжения.
Управляемый ограничитель 14 скорости содержит три инвертирующих
усилителя 15,16 и 17, два ключа 18 и 19 и два диода 20 и 21, встреч)ю шунтирующих цепи обратных связей первых двух инвертирующих усилителей 15 и 16. Первые входы первых двух инвертирующих уснгГителей 15 и. 16 образуют пороговые входы управляемого ограничителя 14 скорости, а объединенные вторые входы - сигнальный вход управляемого ограничителя 14 скорости, выходы первых двух инвертирующих усилителей 15 и 16 соединены с соответствующими входами третьего инвертирующего усилителя 17, а также с замкнутыми аналоговыми входами обоих ключей 18 и 19 соответс.твенно, аналоговые выходы которых образуют соответствующие выходы управляемого ограничителя 14 скорости, а входы управления - входы коммутации управляемого ограничителя 14 скорости, выход третьего инвертирующего усилителя 17 соединен с объединенными разомкнутыми аналоговыми входами обоих ключей 18 и 19. I
Устройство работает следующим
образом.
В исходном состоянии, что соответствует нахождению регулируемой координаты в заданном диапазоне значений устройство ведет себя как двухконтур- ная система подчиненного регулирования. При этом скорость электродвигателя определяется установленным заданием, а напряжение вращения - работой соответствующей группы тиристорного преобразователя 8 в выпрямительном режиме. Прохождение отпирающих импульсов с выходов системы 7 к указанной группе тиристорного преобразователя 8 1|сонтролируется логическим устройством 6, которое своими сигналами с дискретных выходов коммутирует соответствующие цепи системы 7. Состояние выходов логического устройства 6 определяется полярностью разностного сигнала, который образуется на соответствующем выходе нелинейного звена 5 из выходных сигналов упомянутого звена и функционального преобразователя ЭДС 11, а также наличием напряжения на тиристорах тиристорного преобразователя 8. Сигнал управления с соответствующего выхода нелинейного звена 5, преобразуется в логическом устройстве 6 в однополярный сигнал и с аналогового выхода послед-
5
него поступает на уттравляющнй вход системы 7, где происходит формирование последовательностей отпирающих импульсов. Любые возмутдения со сторо ны нагрузки отрабатываются в замкнутой по скорости электродвигателя сис теме автоматического регулирования.
При этом изменяется полярность разностного сигнала на входе логического устройства 6, происходит переключение его дискретных выходов, исчезновение тока в силовой цепи, на выходе совпадения логического устройства 6 имеет место результирующий сигнал низкого уровня и при отсутствии управляющих импульсов обеспечивается блокировка выдачи управляющих импульсов и отсчет бестоковой паузы, по окончании которой происходит переключение и логического устройства 6, в работу вступает инверторная групп тиристорного преобразователя 8.
Выходные сигналы управляемого ограничителя 14 с аналоговых выходов ключей 18 и 19 близки к О и не влияют на работу устройства. Действительно, при нахождении сигнала с выхода датчт-пса 10 скорости в диапазоне, ограниченном максимальным и мин)аль ным значениями, диоды 20 и 21 смещены в прямом направлении и шунтируют обреттные цепи инвертирующих усилителей 15 и (6, обеспечивая тем самым вькодные сигналы управляемого ограничителя 14 на уровне, определя- etMOM падениями напряжения на прямосме щенных р-п-иереходах. При установке сигнала задания на уровень, превышающий граничные значения диапазона, а следовательно, достижении сигналом обратной связи установленного задания, сигнал с выхода блока 13 пре- вьппает один из опорных уровней, например запирается диод 21 и на выходе усилителя 6 появляется сигнал отрицательной полярности, который для случая положительного сигнала задания компенсирует избыточное задание путем алгебраического суммирования указанных сигналов на входах источника 2 задающего напряжения. Изменяется полярность сигнала с выхода нелинейного звена 5, переключается логическое устройство 6, и блокщ-уются управляющие импульсы с выходов системы 7. Но окончании бестоковой паузы переключаются группы тиристорного преобразователя 8 и имеет место тор153136
мозной режим работы электродвигателя. И. чТС :сивность ограничения, характер1Г- зующая в данном слу чае темп торможе- ния электродвигателя, при неизмен- ной постоянной интегрирования источника 2 задающего напряжения определяется амплитудой результирующего сигнала задания. При снижении сигнала до
.Q установленного верхнего предельного уровня, определяемого опорным напряжением, происходит обратный продесс восстановления предыдущих состояний и электродвигатель 1 вновь работает
5 в квадрантах электромеханической характеристики, определяющих двигательный режим.
Аналогично работает .устройство При установке сигнала задания на ско0 рость ниже минимально допустимой. Отличие состоит в том, что в исходном состоянии диод 20 смещен в прямом направлении большим положительным потенциалом сигнала текущего зна5 чения скорости электродвигателя ,поэтому при работе последнего со скоростью, ниже предельной минимальной, на выходе инвертирующего усилителя 15 имеет место положительный сигнал, который в
0 совокупности с положительнь1м сигналом чадакия сообщает электродвигателю 1 необходимое ускорение. Темп ускорения аналогично случаю ограничения максимальной сверхдопустимой скорости определяется амплитудой результирующего сигнала задания на входе источника 2 задающего напряжения.
При изменении направления вращения электродвигателя полярность вы0 ходных сигналов управляемого огра- Н -гчителя 14 меняется на противоположную. Инвертирование знака осуществляется инвертирующим усилителем 17, однако неизменно, как это слее дует из изложенного вьппе, соблюдается следующий принцип формирования сигналов: при ограничении сигналов выше максимально допустимьк соответствующий выходной сигнал управляемо0 го ограничителя 14 является противофазным сигналу задания,а при ограничении сигналов ниже предельных минимальных - синфазным.Выборка знака выходных сигналов управляемого ограничителя 14
е осуществляется ключами 18 и 19, при этом сигнал коммутируется либо непосредственно с выходов (-швертир то- щих усилителей 15 или 1в к соответствующим входам источника 2 злдаюшгто
5
напряжения, либо с выхода инвертирующего усилителя 17,
Регулированием опорных уровней с. соответствующих вьгходов источника 12 достигается существенное расширение диапазона изменений скорости электродвигателя 1. Изменением же коэффициентов передачи инвертирую-v. щих усилителей 15 и 16 регулируется требуемая интенсивность ограничения, которая при неизменной постоянной интегрирования источника 2 задающего напряжения определяется изменением результирующего задающего сигнала, образующегося при алгебраическом суммировании сигналов на входах источника 2,
Аналогично при отклонениях скорости электродвигателя за пределы допустимого диапазона, вызванных ускорением или стопорением двигателя вследствие каких-либо возмущений со стороны нагрузки, всегда будет иметь место управляемое ограничение посредством сигналовj вырабатываемых управляе мым ограйичителем 14, при алгебраичес ком суммировании последних с сигналом задания скорости.
Во всех рассмотренных случаях изменения текущего значения скорости сохраняется действие ограничителей максимально возможного тока якоря в регуляторах скорости и тока 3,4 (ограничение задания на ток, упреждающее и зависимое токоограничение) при недопустимых колебаниях скорости электродвигателя.
Технико-экономическая эффективность предлагаемого устройства состоит в существенном расширении функциональных возможностей управления электродвигателем путем введения управляемого ограничения скорости и управления интенсивностью этого ограничения при колебаниях скорости, превышающих предельно допустимые значения, вследствие ускорения или сто- порения электропривода, возникающих при возмущениях как по заданию, так и по нагрузке. Последнее важно в электроприводах грузоподъемных механизмов, где особенно часты самопроизвольные ускорения и замедления электродвигателя, которые могут происходить с недопустимым темпом, при выполнении спускоподъемных операций.
Обеспечение стабильной работы электродвигателей в допустимом диа0
5
0
5
0
5
0
5
0
5
пазоне скоростей повышает надежность и уменьшает износ электрооборудования.
Формула изобретения
1.Электропривод постоянного тока, содержащий двигатель, последовательно соединенные источник задающего напряжения, регулятор скорости, регулятор тока, нелинейное звено типа насыщение, ло1- ическое устройство раздельного управления, систему импульсно- фазового управления, тиристорный преобразователь, выходом подключенный
к якорной обмотке двигателя, датчики тока и скорости, подключенные к входам соответствующих регуляторов, функциональный преобразователь ЭДС, вход которого подключен к датчику скорости, а выход - к второму входу нелинейного звена типа насыщение, логическое устройство раздельного управления содержит входы питания, два других входа соединены соответст- 1 венно с выходами тиристорного преобг разователя и выходом блокировки системы импу.пьсно-фазового управления, входы коммутации которой соединень с дискретными выходами логического устройства раздельного управления, выход совпадения которого соединен С входом блокировки системы импульс- но-фазового управления, отличающийся тем, что, с целью повышения надежности, в него введены источник опорного напряжения, блок выделения модуля, управляемый ограничитель скорости, а источник задающего напряжения выполнен с дополнительными входами, при этом сигнальный вход управляемого ограничителя скорости соединен с выходом блока выделения модуля, вход которого соединен с выходом датчика скорости, пороговые входы управляемого ограничителя скорости соединены с соответствующими выходами источника опорного напряжения, входы коммутации - с дискретными выходами логического устройства раздельного управления, а аналоговые выходы - с соответствующими дополнительными входами источника задающего напряжения.
2.Электропривод по п.1, о т л и- чающийся тем, что управляемый ограничитель скорости содержит три инвертирующих усилителя, два
ключа и два диода, встречно шунтирующих цепи- обратных связей перв1 гх двух инвертирующих усилителей, при этом первые входы первых двух инвертирующих усилителей образуют пороговые входы управляемого ограничителя скорости, а объединенные вторые входы - сигнальный вход управляемого ргранич ггеля скорости, выходы первых двух инвертирующих усилителей соединены с соответствующими входами
третьего инвертирующего усилителя, а также с замкнутыми аналоговыми входами обоих ключей соответственно, аналоговые выходы которых образуют соответствующие выходы управляемого ограничителя скорости, а входы управления - входм коммутации управляемого ограничителя скорости, выход третьего инвертирующего усилителя соединен с объединенными разомкнутыми анало- говьни входами обоих ключей.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для раздельного управления реверсивным тиристорным преобразователем | 1987 |
|
SU1503055A1 |
| Электропривод постоянного тока | 1987 |
|
SU1473057A1 |
| Электропривод постоянного тока | 1991 |
|
SU1815785A1 |
| Реверсивный электропривод постоянного тока с двухзонным регулированием частоты вращения | 1986 |
|
SU1394383A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Способ управления тиристорнымпРЕОбРАзОВАТЕлЕМ и уСТРОйСТВОдля ЕгО ОСущЕСТВлЕНия | 1979 |
|
SU824398A1 |
| Электропривод переменного тока | 1986 |
|
SU1332506A1 |
| Устройство для управления и защиты тиристоров многофазного выпрямителя | 1977 |
|
SU687557A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1988 |
|
SU1654208A1 |
Изобретение относится к электротехнике, а именно к реверсивным электроприводам постоянного тока с контролируемым диапазоном изменения скоростей. Целью изобретения является повышение надежности. Электропривод содержит электродвигатель 1, источник 2 задающего напряжения, тиристорный преобразователь 8, двухконтурную систему подчиненного регулирования, управляемый ограничитель 14 скорости. Повышение надежности достигается за счет управляемого ограничения скорости и управления интенсивностью этого ограничения при колебаниях скорости, превышающих предельно-допустимые значения, вследствие ускорения или стопорения электродвигателя при возмущениях как по заданию, так и по нагрузке. 1 з.п. ф-лы, 1 ил.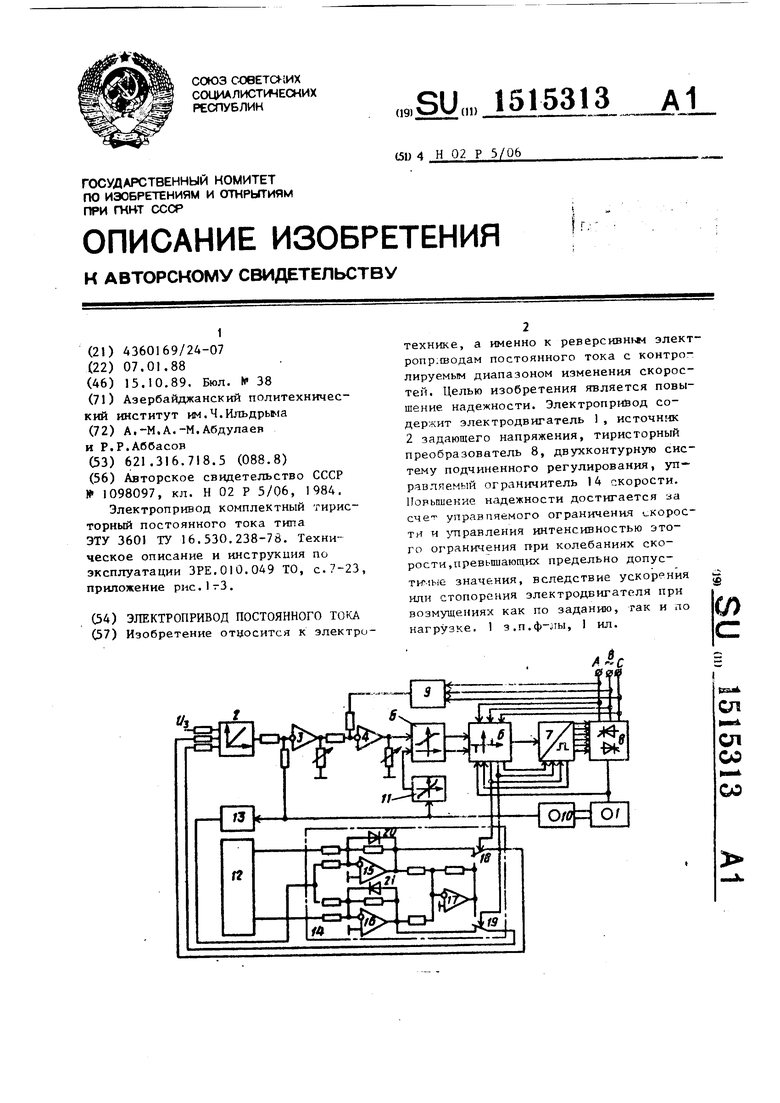
| Устройство для определения соответствия скорости электропривода заданной | 1983 |
|
SU1098097A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ПРЕДОХРАНИТЕЛЬНЫЙ КЛАПАН ДЛЯ ГАЗО-КЕРОСИНОВЫХ НАГРЕВАТЕЛЬНЫХ ЛАМП | 1924 |
|
SU3601A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
