2. Электропривод по п. 1, о -т л ичающийся тем, что определиг тель частоты вращения выполнен в виде параметрической модели подключен входом к выходу регулятора частоты вращения и содержит последовательно соединенные блок задания статического момента, сумматор и щ)тегратор, при этом входом определителя частоты вращения является второй вход сумматора, а выходом выход -интегратора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока (его варианты) | 1984 |
|
SU1249686A1 |
| Частотно-регулируемый электропривод | 1979 |
|
SU866679A1 |
| Частотно-регулируемый электропривод | 1979 |
|
SU866681A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1453574A1 |
| Частотнорегулируемый асинхронный электропривод | 1981 |
|
SU1078568A2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод переменного тока | 1984 |
|
SU1185528A1 |
| Электропривод переменного тока | 1987 |
|
SU1439728A2 |
| Электропривод с регулированием активной и реактивной энергии от сети ограниченной мощности | 1978 |
|
SU884065A2 |
1. ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД, содержащий асинхронный двигатель с короткозамкнутым ротором, подлюченный к преобразователю частоты с автономным инвертором напряжения, блок преобразования координат, первый вход кото- I рого через первый сумматор и регулятор Частоты вращения соединен с выходом блока задания частоты вращения, второй вход через второй сумматор соединен с выходом регулятора частоты вращения, третий вход через третий сумматор - с выходом блока задания потокосцепления, а два выхода подключены к управляющим входам преобразователя частоты, определитель частоты вращения, выполненный в виде тахогенератора, установленного на валу асинхронного двигателя и соединенного выходом с вторым входом .регулятора частоты врещния и вторым йходом второго сумматора, выход которого подключен также к второму входу первого сумматора, отличающийся тем,, что, с целью повы(Л шения точности, в него введен блок умножения, первый вход которого подс ключен к выходу регулятора частоты вращения, второй вход - к выходу второго сумматора, а выход - к второму входу третьего сумматора. 4 05 00 со
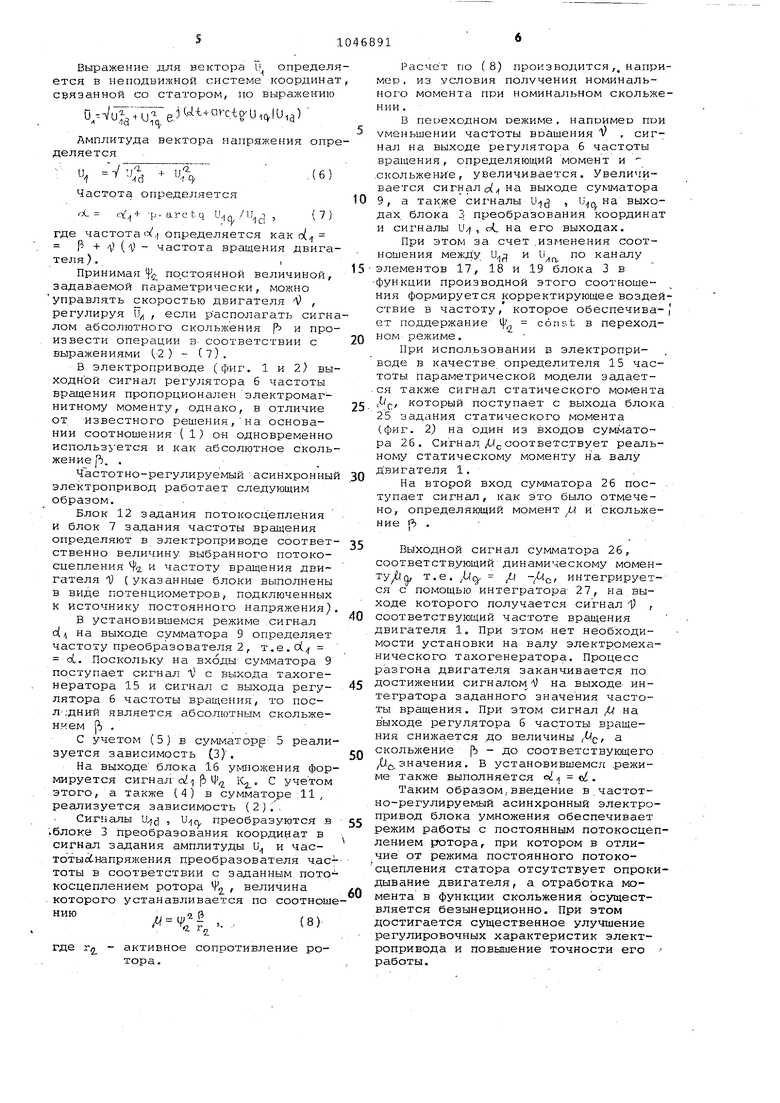
Изобретение относится к электротехнике, а именно к частотно-регулируемым асинхронным электроприводам с тиристорными преобразователями частоты на основе автономных ин,верторов напряжения, и предназначено для регулирования скорости нагрузки. . Известен.частотно-регулируемый асинхронный электропривод, содержащий асинхронный двигатель с короткоЗа крутым ротором, подключенный к преобр .зователю частоты с автономным инвертором напряжения. Электропривод йме .ет замкнутую систему регулирования амплитуды .напряжения, причемвход задания амплитуды на. входе регулиро напряжения подключен к входу задания частоты через нелинейный элемент, который реализует выбранную зависимость амплитуды напряжения статора от частоты. Вход задания частоты подключен к выходу задатчика интенсивности 1. Нелинейный элемент обеспечивает компенсацию падения напряжения в ак тивных сопротивлениях, обмоток статора только при фиксированном момен те нагрузки, поэтому известный злек ропривод имеет неудовлетворительные регулировочные характеристики как . в установившемся режиме-, так и в ди намике, поскольку не обеспечивает постоянства потокосцепления двигате г, Наиболее близким к предлагаемому является частотно-регулируемый асин хронный .электропривод, ..содержащий асинхронный двигатель с короткозамкнутым ротором, подключенный к преобразователю частоты с : автономным инвертором напряжения, блок преобразования координат, первый . вход которого Через первый сумматор - и регулятор частоты вращения соединен с выходом блока задания частоты вращения, второй вход через второй сумматор соедийен с выходом регулятора частоты вращения, третий вход через третий сумматор соединен с выходом блока задания потокосцепле нйя, а два выхода подключены к управляющим входам преобразователя частоты, техогенератор, установленный на валу асинхронного двигателя, выход которого соединен с вторым входом регулятора частоты и вторым входом.второго сумматора, выход которого подключен также к второму. входу первого сумматора. При этом выход регулятора частоты.вращения связан с вторым входом третьего сум.матора 2j . . - .Недостатком указанного электроприв.ода является невысокая точностьработы, обусловленная тем, что в нем обеспечивается режим постоянства потокосцепления статора, который не является оптимальным для асинхронного-двигателя как с точки зрения перегрузочной способности, так и динамических характеристик. Цель изобретения - повышение точности за счет улучшения регулировочных характеристик при обеспечении режима постоянства потокосцепления ротора. . Указанная цель достигается тем,что в частотно-регулируемый асинхронный электропривод, содержащ-ий асинхронный двигатель с короткозамкнутым .ротором, подключенный к преобраэователю частоты с автоног шым инвертором напряжения, блок преобразования координат, первый вход которого через первый сумматор и регулятор частоты вращения соединен с выходом блока задания.частоты вращения,, второй вход черей второй сумматор - с выходоМ. регулятора частоты вращения, третий вход через третий сумматор ; соединен с выходом блока задания потокосцепления, а два выхода подключены к управляющим входам преобразователя частоты, определитель частоты вращения, выполненный в виде тахогенератора, установленного на валу асинхронного двигателя и соеди-; венного выходом с вторым входом р е гулятора частоты и вторым входом второ.го сумматора,выход которого подключен таЛжё к второму входу первого сумматора,введен блок умножения,первый вход которого подключен к выходу регулятоРа частоты, второй вход - к выходу второго сумматора, а выход - к второму входу третьего сумматора. Кроме того, определитель частоты вращения подключен входом к выходу регулятора частоты и выполнен в виде последовательно соединенных блока задания статического момента, сумматора и интегратора, при этом входом определителя частоты вращени является второй вход сумматора/ а выходом - вьоход интегратора. На фиг. 1 представлена структурная схема частотно-регулируемого асинхронного электропривода с определителем частоты вращения в виде .тахогенератора на валу; на фиг. 2 то же, с определителем частоты вращения в виде параметрической модели Частотно-регулируемый асинхронны электропривод содержит асинхронный двигатель 1 с коротко замкнутым рото ром, подключенный к преобразователю 2 частоты с автономным инвертором напряжения, блок 3 преобразования .координат, первый вход 4 которого через первый сумматор 5 и регулятор 6 частоты вращения соединен с выходом блока 7 задания-частоты вращения. Второй вход 8 преобразователя 3 координат через второй сумматор 9 соединен .с выходом регулятора б .час тоты вращения. Третий вход 10 преоб разователя 3 координат через третий сумматор 11 соединен с выходом блока задания потокосцепления 12. Два выхода 13 и 14 преобразователя 3 координат подключены к управляющим входам преобразователя 2 частоты. Определитель частоты вращения, выполненный в виде тахогенератора . 15, установленного на валу асинхрон ного двигателя 1, соединен выходом с -вторым входом регулятора 6 частот вращения и вторым входом второго сумматора 9, выход которого подключен также к второму входу первого сумматора 5. . Электропривод содержит блок 16 умножения, первый вход которого под ключен .к выходу регулятора 6 частот вращения, второй вход - к выходу вт рого сумматора 9, а выход - к второ му входу третьего сумматора 11. Блок 3 преобразования координат содержит элемент 17 деления, входы которого являются входами 4 и 10 бло ка- 3 преобразования координат. Выход элемента 17 деления через функциональный элемент 18 с характеристи кой arc tg и элемент 19 дифференцирования подключен к первому вхоф -сумматора 20, второй вход которого .является входом 8 блока 3 преобразования координат. Входы 4 и 10 блока преобразования координат являются ;также соответственно входами квадра« торов 21 и 22, выходы которых через сумматор 23 подключены к входу элемента 24 извлечения корня квадратного. выходы элемента 24 извлечения корня квадратного и сумматора 20 являются соответственно выходами 13 и 14 блока 3 преобразования координат. Определитель 15 частоты вращения, выполненный в виде параметрической модели, подключен входом к выходу регулятора 6 частоты вращения (фиг.2) и содержит последовательно соединенные блок 25 задания статического момента, сумматор 26 и интегратор 27, при этом входом определителя 15 частоты вращения является второй вход сумматора 26, а выходом - выход интегратора 27. : В частотно-регулируемом асинхронном электроприводе по схемам фиг.1 и 2,осуществляетсярежим постоянства потокосцепления ротора (2. const) который в отличие от режима постоянства потокосцепления статора (Ч const) является наиболее оптимальным с точки зрения регулировочных характеристик двигателя. Этот режим характеризуется отсутствием опрокидывания На механической характеристике двигателя, а также безынерционной реакцией электромагнитного момента на малое изменение абсолютного скольжения р . При линеаризации в малом уравнения асинхронного двигателя в окрестностях установившегося режима, независимо, от величины абсолютного скольжения, передаточная функция момента р, по каналу скольжени-я определяется выражением MW-CT nnriCsTTf n сгеа ггет пт лпдть- ммРм Д|Р(Р) к, ,1 где К - коэффициент пропорциональности . р - оператор. Анализ уравнения асинхронного двигателя для ортогональной системы координат (а, q), связанной с вектором потокосцепления ротора Ф при условии совмещения одной из осей (d) с вектором .позволяет получить следующие выражения для проекций вектора и td -t ,l 2--i 2) М .. где c(.- частота вращения вектора U в установившемся режиме; К ,К - коэффициенты пропорциональ-, ности. В свою- очередь, проекции вектора тока статора 1 определяются из выра id V Ч иРЧег, где X - сопротивление взаимоиндукции статора и ротора; Ки - коэффициент пропорциональности. Выражение для вектора и определя ется в неподвижной системе координат связанной со статором, по выражению и Vi. e,- CtgU.,cvlU,3) Амплитуда вектора напряжения опр деляется Частота определяется fX. ,:х -1- -р , arc t q и,, / 1; j , ( 7 ) где частота i:x,i определяется как с( Р + ) (1) - частота вращения двига теля)., Принимая %, постоянной величиной, задаваемой параметрически, можно управлять скоростью двигателя , регулируя и , если располагать сигн лом абсолютного скольжения р и произвести операции в соответствии с выражениями (2 ) - (7). В электроприводе (фиг. 1 и 2) вы ходной сигнал регулятора б частоты вращения пропорционален электромагнитному моменту, однако, в отличие от известного решения,на основании соотношения ( 1} он одновременно использьется и как абсолютное сколь жение, . Частотно-регулируемый асинхронный электропривод работает следующим образом. Блок 12 задания потокосцепления и блок 7 задания частоты вращения определяют в электроприводе соответ ственно величину, выбранного потокосцепления Ча и частоту вращения двигателя 1} ( указанные блоки выполнены в виде потенциометров, подключенных к источнику постоянного напряжения) В установившемся режиме сигн.ал на выходе сумматора 9 определяет частоту преобразователя 2 , т.е.о( ct. Поскольку на входы сумматора 9 поступает сигнал Л) с выхода тахогенератора 15 и сигнал с выхода регулятора б частоты вращения, то посл :дни-й является абсолютным скольжением Р) , С учетом (5) в сумматору 5 реали зуется зависимость (3). На выходе блока 16 умножения фор мируется сигнал cv/,/1 ji Ф iC2. С учетом этого, а также (4) в сумматоре :11у реешизуется зависимость (2)., Щ , U-jcy преобразуются в .блоке 3 преобразования координат в сигнал задания амплитуды и и частотысбнапряжения преобразователя час тоты в соответствии с заданным пото косцеплением ротора 5. величина которого устанавливается по соотнош i г„ TQ активное сопротивление ротора. Расчет по (8) производится ,, например , из УСЛОВИЯ получения номинального момента ПРИ номинальном скольжен и и. В переходном режиме, например пои уменьшении частоты йоащения V , сигнал на выходе регулятора б частоты вращения, определяющий момент и .скольжение, увеличивается. Увеличивается сигнал о( на выходе сумматора 9, а также сигналы , и, на выходах, блока 3 преобразования координат и сигналы и/1 , сЯ. на его выходах. При этом за счет .изменения соотношения между и по каналу элементов 17, 18 и 19 блока 3 в функции производной этого соотношения формируется корректирующее воздействие в частоту, которое обеспечива-I ВТ поддержание , - const в переходном режиме. При использовании в электроприводе в качестве определителя 15 частоты параметрической модели задается также сигнал статического момента (tfj-, который поступает с выхода блока 25 задания статического момента (фиг. 2) на один из входов сумматора 26. Сигнал/Jj.,соответствует реальному статическому моменту на валу Двигателя 1. На второй вход сумматора 26 поступает сигнал, как это было отмечено, определяющий момент и и скольжение Ь . Выходной сигнал сумматора 26, соответствующий динамическому моменту/ д, т.е. ,1.с - JH -/(Л,, интегрируется с помощью интегратора 27, на выходе которого получается сигнал 1) , соответствующий частоте вращения двигателя 1. При этом нет необходимости установки на валу электромеханического тахогенератора. Процесс разгона двигателя заканчивается по достижении сигналом/V на выходе интегратора заданного значения частоты вращения. При этом сигнал / на выходе регулятора 6 частоты вращения снижается до величины , а скольжение Ь - до соответствующего /(. значения. В установившемс;с режиме также выполняется о . Таким образом,введение в.частотно-регулируемый асинхронный электропривод блока умножения обеспечивает режим работы с постоянным потокосцеплен.ием ротора, при котором в отличие от режима постоянного потокосцепления статора отсутствует опрокидывание двигателя, а отработка момента в функции скольжения осуществляется безынерционно. При этом достигается существенное улучшение регулировочных характеристик электропривода и повышение точности его работы.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ЧАСТОТНО РЕГУЛИРУЕМЫЙ ПРИВОД | 0 |
|
SU409347A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Частотно-регулируемый электропривод | 1979 |
|
SU866679A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
