в
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения угла закручивания вращающегося вала | 1991 |
|
SU1795312A1 |
| Помехоустойчивый цифровой фазометр | 1979 |
|
SU1002979A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ЗАКРУТКИ ВАЛА, ЗАКРУЧЕННОГО ДЕЙСТВИЕМ КРУТЯЩЕГО МОМЕНТА С ИСПОЛЬЗОВАНИЕМ ШКАЛЫ НОНИУСА ПРИ НЕПРЕРЫВНО ВРАЩАЮЩЕМСЯ ВАЛЕ | 1992 |
|
RU2107271C1 |
| Цифровой автокомпенсационный фазометр | 1984 |
|
SU1196777A1 |
| Устройство для измерения параметров внутрицилиндрового давления двигателей внутреннего сгорания | 1980 |
|
SU934261A1 |
| Устройство формирования сигнала сдвинутой частоты | 1986 |
|
SU1394426A1 |
| Цифровой фазометр | 1981 |
|
SU1029100A1 |
| ИЗМЕРИТЕЛЬ ОТНОШЕНИЯ СИГНАЛ-ШУМ | 1992 |
|
RU2117954C1 |
| Способ контроля моточных элементов и устройство для его осуществления | 1980 |
|
SU938207A1 |
| Цифровой моментомер | 1980 |
|
SU964494A2 |
Изобретение относится к силоизмерительной технике и может быть использовано для измерения крутящего момента и мощности различных двигательных установок, на морском и речном транспорте и в других отраслях народного хозяйства. Цель изобретения - повышение точности. Под действием крутящего момента, передаваемого упругим валом 1, происходит взаимный угловой разворот измерительных дисков 2, 3. При этом импульсные сигналы с датчиков 4, 5 имеют фазовый сдвиг, пропорциональный передаваемому крутящемуся моменту. Этот фазовый сдвиг преобразуется схемой 8 совпадения во временной интервал, который заполняется счетными импульсами от генератора 10, которые пересчитываются счетчиком 13 за один оборот вала и результат счета в течение оборота хранится в регистре 14 и умножается на частоту вращения вала в умножителе 15 частоты, импульсы с выхода которого в течение интервала времени измерения вырабатываемого задатчиком 11, пересчитываются счетчиком 16, а результаты счета через регистр 17 и коммутатор 18 подаются на первый вход цифрового индикатора 20 и индицируется в виде значения величины крутящего момента. В сумматоре 19 производится вычитание из величины измеренного фазового сдвига, хранящегося в регистре 17 величины фазового сдвига, обусловленного неточностью начальной установки измерительных дисков 2, 3 (которая предварительно вводится в регистр 21). Результат коррекции величины фазового сдвига хранится в регистре 22 и перемножается на частоту вращения вала в умножителе 23 частоты, импульсы с выхода которого пересчитываются счетчиком 24 в течение интервала времени измерения, а результат счета в виде цифрового кода, соответствующего мощности передаваемой валом, индицируется цифровым индикатором 20. Ил.2
(Л
СП
а
00
о со
Фиг.
момента, передаваемого упругим валом 1 , происходит взаимный угловой разворот измерительных дисков 2, 3. При этом импульсные сигналы с датчиков , 5 имеют фазовый сдвиг, пропорциональный передаваемому крутящему моменту. Этот фазовый сдвиг преобразуется схемой 8 совпадения во временной интервал, который заполняется счетными импульсами от генератора 10, которые пересчитываются сметчиком 13 за один оборот вала и результат счета в течение оборота хранится в регистре I и умножается на частоту вращения вала в умножителе 15 частоты, импульсы с выхода которого в течение интервала времени измерения, вырабатываемого задатчиком 11, пересчитываются счетчиком 1б, а результаты счета через регистр 17 и коммутатор 18 подаются
Изобретение относится к силоизме- рительной технике и может использоваться для измерения крутящего момент и мощности различных двигательных ус- тановок на морском и речном транспорте и в других отраслях народного хозяйства .
Цель изобретения - повышение точности.
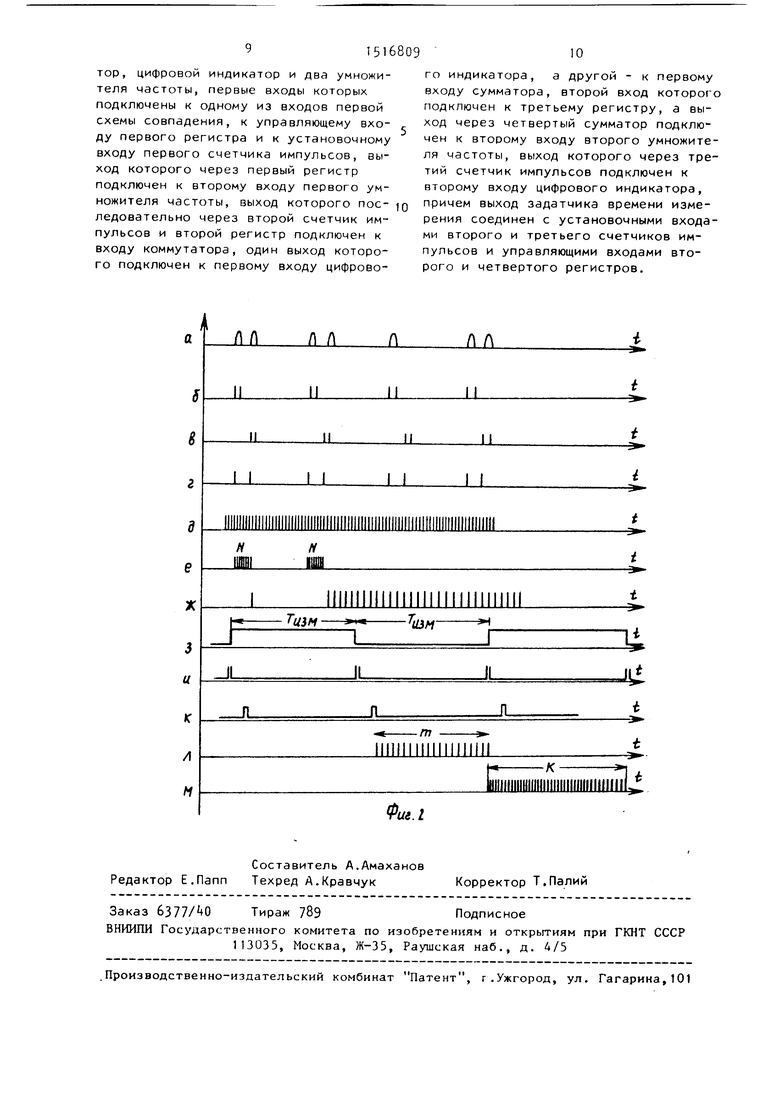
На фиг.1 показана структурная схема измерителя; на фиг.2 - диаграммы, поясняющие его работу.
Цифровой измеритель крутящего момента (фиг.1) содержит упругий вал 1, на концах которого расположены измерительные диски 2 и 3, являющиеся подвижной системой импульсных датчиков k и 5. Выходы импульсных датчиков k и через усилители-ограничители 6 и 7 соединены с первой схемой 8 совпадения, выход которой подключен к первому входу второй схемы 9 совпадения, второй вход которой соединен с выходом генератора 10 счетных импульсов и входом задатчика 11 времени измерения, выход которого соединен с блоком 12 управления.
Выход схемы 9 совпадения соединен с первым входом счетчика 13 импульсов выход которого соединен с первым входом регистра 1 t. На выходе регистра 1 в конце каждого цикла формируется код числа импульсов, пропорциональнона первый вход цифрового индикатора 20 и индицируется в виде значения величины крутящего момента. В сумматоре 19 производится вычитание из величины измеренного фазового сдвига, хранящегося в регистре 17 величины фазового сдвига, обусловленного неточностью начальной установки измерительных дисков 2, 3 (которая предварительно вводится в регистр 21). Результат коррекции величины фазового сдвига хранится в регистре 22 и перемножается на частоту вращения вала в умножителе 23 частоты, импульсы с выхода которого пересчитываются счетчиком 2 в течение интервала времени измерения, а результат счета в виде цифрового кода, соответствующего мощности, передаваемой валом, индицируется цифровым индикатором 20. 2 ил.
го временному сдвигу сигналов от импульсных датчиков и 5. Вход регистра lA соединен с одним входом умножителя l5 частоты, другой вход которого соединен с выходом усилителя-ограничителя 7, а выход - с первым входом счетчика 1б импульсов, выход которого соединен с первым входом регистра 17. Выход регистра 17 соединен через коммутатор 18 с первым входом сумматора 19 и первым входом цифрового индикатора 20. Второй вход сумматора 19 соединен с выходом регистра 21, а выход - с первым входом регистра 22, выход которого соединен с вторым входом цифрового индикатора 20 и с управляющим входом умножителя 23 частоты, первый вход которого соединен с выходом усилителя-ограничителя 7- Выход умножителя 23 частоты соединен с первым входом счетчика импульсов, выход которого соединен с третьим входом цифрового индикатора 20. Выход переключателя 25 соединен с входом 21 регистра. Первый выход блока 12 управления соединен с установочными входами счетчиков 1б и 2 импульсов, а второй выход с управляющими входами регистров 17 и 22, установочный вход счетчика 13 импульсов и управляющий вход регистра соединены с выходом усилителя-ограничителя 7.
515
Измерительные диски 2 и 3 служат для линейного преобразования угла закручивания упругого вала 1 в угловой сдвиг между метками на дисках, причем диск 2 установлен на валу со стороны двигателя, диск 3 - со стороны нагрузки.
Импульсные датчики и 5 предназначены для формирования импульсных сигналов при прохождении меток дисков мимо датчиков. Усилители-ограничители 6 и 7 предназначены для формирования импульсов заданного уровня и полярности.
Схема 8 совпадения формирует на выходе сигнал, равный по длительности временному сдвигу импульсов Д t от датчика 5 относительно импульса от датчика .
Схема 9 совпадения совместно с генератором 10 счетных импульсов служит для формирования пачки счетных импульсов, - исло которых в пачке пропорционально, временному сдвигу ut импульсов от датчиков k и S. Счетчик 13 импульсов и регистр 14 предназначены для счета и регистрации числа импульсов N в пачке счетных импульсов в течение одного оборота вала, а также для выдачи кода соответствующего числа N импульсов на управляющий вход умножителя 15 частоты.
Умножитель 15 частоты служит для формирования импульсов, частота следования которых пропорциональна произведению частоты вращения вала f на временной сдвиг ut, т.е. фазовому сдвигу LP импульсных сигналов от дат - иков 4 и 5. На выходе умножителя частота .следования импульсов .
Счетчик 1б импульсов и регистр 17 предназначены для счета и регистрации числа импульсов с выхода умножителя 15 частоты в течение интервала времени измерения.
Коммутатор 18 служит для приема цифрового кода с регистра 17 и передачи на первые входы сумматора 19 и цифрового индикатора 20.
Переключатель 25 и регистр 21 предназначены для формирования и выдачи цифрового кода на второй вход сумматора 19, который служит для выполнения арифметической операции вычитания кода с выхода регистра 17 из кода с выхода регистра 21. Совместное использование переключателя 25, регистров 17 и 21, счетчика 16 импульсов.
6809
сумматора 19 обеспечивает компенсацию начального фазового сдвига Лф„ , вызванного неточностью начальной установки датчиков t и 5, причем на любой частоте вращения вала двигателя.
Регистр 22 служит для регистрации и передачи цифрового кода с сумматора 19 на управляющий вход умножителя 23
0
5
0
5
частоты. Умножитель 23 частоты предназначен для формирования импульсов, частота следования которых пропорциональна произведению частоты вращения f 2. чэ угол закручивания вала ц , т.е.
C мощности двигателя.
Счетчик 24 импульсов предназначен для подсчета импульсов с выхода умножителя 23 частоты, число которых на заданном интервале времени измерения
0 пропорционально средней мощности,
развиваемой двигателем в течение указанного интервала времени.
Цифровой индикатор 20 предназначен для индикации значений крутящего мо5 мента и мощности, а также для обеспечения коррекции погрешности начальной установки датчиков.
Генератор 10 счетных импульсов служит для измерения временного сдвиQ га между сигналами от датчиков, а
также для запуска задатчика 11 времени измерения.
Блок 12 управления предназначен для формирования управляющих сигналов и синхронизации работы элементов устройства .
Измеритель работает следующим образом.
При отсутствии М крутящего момента на валу импульсные сигналы с выходов датчиков 4 и 5 могут иметь взаимный фазовый сдвиг вследствие неточной начальной установки датчиков (фиг.2я, ,Ь). Путем перемножения сигналов с выходов схемы В совпадения (фиг.2i) и генератора 10 счетных импульсов (фиг.24) схема 9 совпадения формирует пачки счетных импульсов (фиг.2е), число которых в пачке .-.At, где fp - частота следования импульсов генератора 10. Эти пачки счетных импульсов поступают на счетчик 13, с выхода которого соответствующий цифровой код заносится на регистр 14 по переднему фронту сигнала с усилителя-ограничителя 7, поступающего на управляющий вход регистра 14. После записи кода в регистр l4 счетчик 13 импульсов устанавливается в нулевое
состояние по заднему фронту сигнала с усилителя-ограничителя 7- Таким образом происходит подготовка к приему новой информации о фазовом сдвиге в очередном цикле измерений.
Цифровой код, записанный на регистре , одновременно поступает на управляющий вход умножителя 15 частоты, на счетный вход которого поступают импульсы с усилителя-ограничителя 7, частота следования которых равна С-j - частоте вращения вала. При поступлении на управляющий вход умножителя 15 частоты цифрового кода происходит запуск умножителя и с его выхода импульсы частотой f, fg N поступают на первый вход счетчика 1б (фиг. 2,), счет импульсов в счетчике 1б происходит за время Т,,, задаваемого задатчиком 11 времени измерения. При истечении времени Т ,,д по сигналу с блока 12 управления (фиг.2,ы,к) происходит запись цифрового кода счетчика 1б в регистр 17. При этом в регистр 17 записывается число т
Ni-:,- т,
пропорциональное суммарному
фазовому сдвигу сигналов от датчиков i и 5 за время Т,„, или среднему значению фазового сдвига при однократном измepeниi1 (фиг.2л). С выхода регистра 17 цифровой код через коммутатор 18 поступает на первый вход цифрового индикатора 20 для индикации. Сброс счетчика l6 импульсов происходит по сигналу с блока 12 управления (фиг.2
к).
Перед рабочими измерениями цифровой код, зафиксированный на индикаторе 20 , с помощью переключателя 25 заносится в регистр 21. Компенсация фазового сдвига M-fn, вызванного неточностью установки датчиков t и 5, осуществляется путем вычитания цифрового кода с регистра 21 из цифрового кода т с выхода коммутатора 18 в сумматоре 19. С выхода сумматора 19 цифровой код ,- Шц, пропорциональный углу закручивания вала ц t| -дер, а следовательно, и крутящему моменту М, поступает на первый вход регистра 22 и заносится в регистр 22 по приходу сигнала на его управляющий вход с блока 12 управления. Код с выхода регистра 22 поступает одновременно на второй вход цифрового индикатора 20 и на управляющий вход умножителя 23 частоты, на счетный вход которого поступают импульсы с усилителя-ограничителя 7
с частотой следования, равной частоте вращения вала, происходит запуск умножителя 23 частоты. Частота следования импульсов с выхода умножителя 23 частоты fj fg т, т.е. пропорциональна мощности двигателя N (так как Ng М о)) . Импульсы с выхода умножителя 23 частоты поступают на первый вход счетчика . По окончании времени Тц,;„ в счетчике импульсов записывается код ,,, f, пропорциональное мощности двигателя на частоте вращения fg (фиг.2м). Цифровой код числа К с выхода счетчика импульсов поступает на третий вход цифрового индикатора 20, после чего по сигналу с выхода блока управления счетчик 2 импульсов после окончания времени обнуляется , а измеритель выполняет следующий цикл измерений.
В каждом из циклов измерений величина крутящего момента М и эффективная мощность двигателя определяются из выражений
MK
2 |Г- С ш 1 Гт
I- г i И5М
0
5
0
5
0
5
2iT-C K
е
где С - крутильная жесткость упругого участка вала;
m - пока зания цифрового индикатора в режиме измерения крутящего момента;
К - показания цифрового индикатора в режиме измерения мощности двигателя.
Формула изобретения
«
Цифровой измеритель крутящего момента и мощности, содержащий вал с упругим участком, по концам которого расположены два измерительных диска, связанные с импульсными датчиками, подключенными через соответствующие усилители-ограничители к входам первой схемы совпадения, выход которой подключен.к первому входу второй схемы совпадения, генератор импульсов, подключенный к входу задатчика времени и второму входу второй схемы совпадения, выход которой подключен к первому счетчику импульсов, отличающийся тем, что, с цепью повышения точности, в него введены второй и третий счетчики импульсов, четыре регистра, сумматор, коммутатор, цифровой индикатор и два умножителя частоты, первые входы которых подключены к одному из входов первой схемы совпадения, к управляющему входу первого регистра и к установочному входу первого счетчика импульсов, выход которого через первый регистр подключен к второму входу первого умножителя частоты, выход которого пос- ледовательно через второй счетчик импульсов и второй регистр подключен к входу коммутатора, один выход которого подключен к первому входу цифровоAJL
АЛ
Л
и.
N
Н
J
UiM
и
го индикатора, а другой - к первому входу сумматора, второй вход которого подключен к третьему регистру, а выход через четвертый сумматор подключен к второму входу второго умножителя частоты, выход которого через третий счетчик импульсов подключен к второму входу цифрового индикатора, причем выход задатчика времени измерения соединен с установочными входами второго и третьего счетчиков импульсов и управляющими входами второго и четвертого регистров.
А
АЛ
i
-.
л
11
- из/i-ан
U
