Изобретение относится к автоматике и вычислительной технике и предназначено для использования в сканирующих устройствах, в которых изменение скорости движения исполнительного органа осуществляется регулированием частоты управляющих сигналов, каждому из которых соответствует изменение координаты исполнительного органа на элементарный шаг.
Целью изобретения является расширение области применения за счет получения переменных и различающихся между собой траекторий и скоростей режимов разгона и торможения.
Изменение частоты управляющих сигналов перемещения исполнительного .органа на выходе устройства происходит вследствие изменения коэффициента деления первого счетчика, значение которого изменяется на величииу DCK нз каждом шаге в режимах разго-; на и торможения и подчиняется закономерности, выраженной формулой
СП
UA
F СП
ск
где F.
К шд
частота импульсов на шине управления Опорная часто-
начальный, максимальный коэффициент деления первого счетчика;
частота управляющих сигналов о
Второй счетчик реализует функцию
К -.D Dc,.
Возможность изменения содержимого четвертого счетчика раздельно по режимам работы позволяет получать различающиеся между собой траектории рпзгона и торможения, что обеспечиваИ 5, один вход которого соединен с шиной управления Установка в О, а второй - с выходом счетчика 1, один вход элемента И 7 соединен с шиной 12 управления Опорная частота, второй - с выходом элемента НЕ 16, а выход - с первыми входами элементов И 3 и 4, вторые входы которых соеди

| название | год | авторы | номер документа |
|---|---|---|---|
| Программно-управляемый модуль | 1986 |
|
SU1405028A1 |
| Программно-управляемый модуль | 1986 |
|
SU1327060A1 |
| Устройство для автоматического разгона и замедления двигателя станка с программным управлением | 1983 |
|
SU1120287A1 |
| Программно-управляемый модуль | 1986 |
|
SU1403018A1 |
| Устройство для программного управления скоростью шагового электропривода | 1983 |
|
SU1137444A1 |
| Программно-управляемый модуль | 1986 |
|
SU1327066A1 |
| Устройство для управления перемоточным станком | 1982 |
|
SU1087594A1 |
| Устройство для разгона и торможения двигателя исполнительного механизма | 1986 |
|
SU1361507A1 |
| Устройство для автоматического регулирования натяжения длинномерного материала при перемотке | 1985 |
|
SU1341138A1 |
| Устройство для разгона и торможения электропривода | 1986 |
|
SU1374182A1 |

Изобретение относится к автоматике и вычислительной технике и предназначено для использования в сканирующих устройствах. Цель изобретения - расширение области применения за счет получения переменных и различающихся между собой траекторией и скоростей режимов разгона и торможения. Изобретение позволяет повысить гибкость управления движением и применить его в сканирующих устройствах толщиномеров при различных геометрических размерах измеряемого материала и при переменных требованиях к скорости сканирования, к участкам разгона и торможения. Цель достигается путем введения дополнительных счетчиков и шин связи, которые служат для задания числа перемещений для каждого из режимов работы в отдельности и величины ускорения, исходя из требуемой скорости перемещения и участков разгона и торможения. 2 ил.
ет гибкость управления режимами рабо- Q нены соответственно с шинами 10 и II
ты и расширяет функциональные возможности устройства о
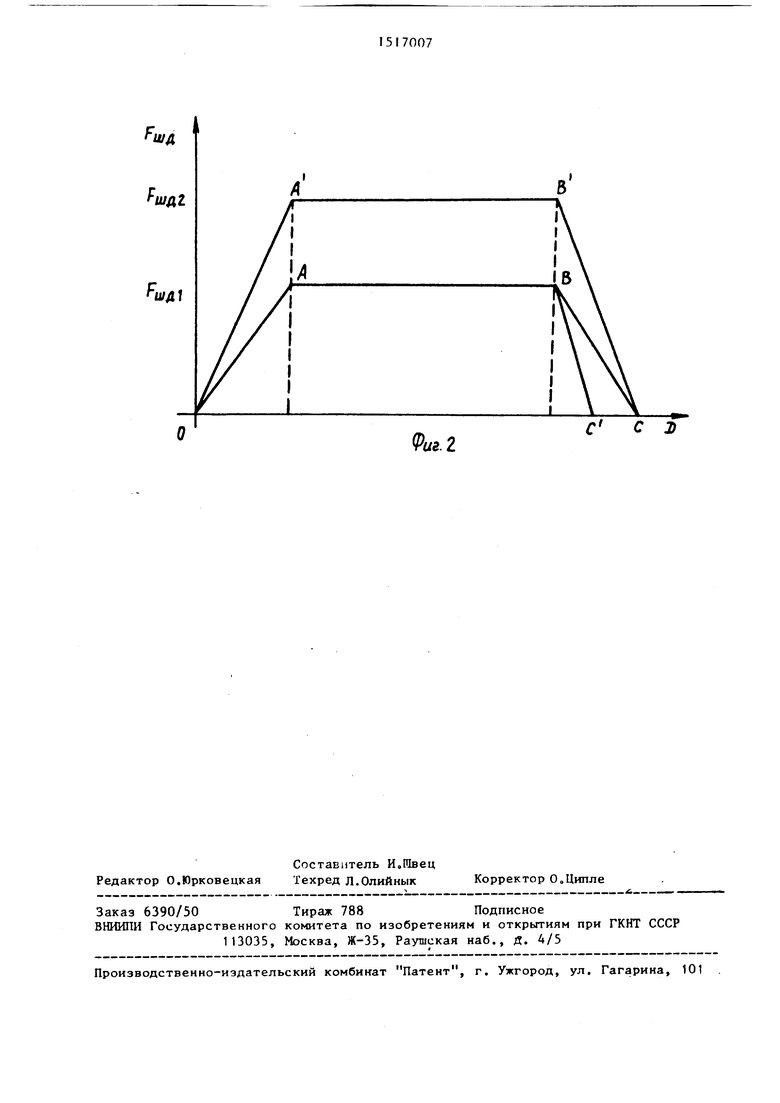
На фиг„1 показано устройство для программного управления скоростью изменения частоты управляющих сигналов, пропорциональной скорости движения исполнительного органа при отработке различных траекторий в режимах разгона - постоянной скорости - торможения; на фиг 2 - временные диаграммы работы устройства.
Устройство для программного управления скоростью шагового электропривода содержит счетчики 1 и 2 импульсов, элементы И 3-7, элемент ИЛИ 8, шины 9-12 управления, при этом вход установки в О.счетчиков 1 и 2 соединен с шиной 9 Установка в О, вход прямого счета счетчика 2 соединен с выходом элемента И 3, а вход обратного счета - с выходом элемента И 4, а также содержит счетчики 13 и 14 импульсов, шину 15 управления Пуск, элемент НЕ 16, два триггера 17 и 18 и шины 19-30 связи, при этом входы параллельной загрузки счетчика 1 соединены с выходами счетчика 2, вход разрешения записи соединен с выходом элемента И 5 и входом установки в О триггера 17, а вход прямого счета счетчика является выходом устройства, счетный вход счетчика 13 импульсов соединен с выходом элемент ИЛИ 8, входы которого соединены с выходами элементов ИЗ и 4, выход переноса счетчика 13 соединен с тактовым входом триггера 17, а вход разрешения счета - с выходом элемента НЕ 16, вход которого соединен с выходом триггера 17, вход разрешения счета счетчика 14 соединен с шиной 15 управления Пуск, его счетный вход соединен с выходом счетчика 1, я выход связан с тактовым входом триггера 18, выход которого соединен с установочным входом триггера 17, а установочный вход - с шиной 9 Установка в О, вход установки в О триггера 17 соединен с выходом элемента
0
5
0
управления Ускорение и Замедление , входы счетчиков 13 и 14 подсоединены соответственно к шинам 20 и 21 их параллельной загрузки, один вход элемента И 6 соединен с шиной 12 управления Опорная частота, а другой вход - с шиной управления Установка в
На выходе переполнения счетчика 1 формируются управляющие сигналы, и их частота зависит от коэффициента делейия счетчика, значение которого подготавливается в счетчике 2 и остается неизменным в режиме постоянной скорости, и меняется в зависимости от требуемого ускорения в режимах разгона и торможения.
Счетчик 13 служит для отсчета величины П , значение которой загружается в него по шине 21, а счетчик 14 - для отсчета заданного количества перемещений D, и момент его переполнения определяет окончание режимов работы устройства Разгон - г Постоянная скорость - Торможение о
Триггер 18 формирует на своем выходе сигнал, являющийся признаком режима постоянной скорости, которым устанавливается триггер 17 и запрещается его переключение о
Триггер 17 работает в режимах разгона и торможения и служит для выработки сигнала, разрешающего поступление импульсов опорной частоты на вход счетчика 2 через элемент И 7
Устройство работает в четьфех режимах: Подготовка устройства, Разгон, Постоянная скорость и Торможение
В режиме Подготовка сигнал на шине 9 Установка в О сбрасывает счетчики 1 и 2 и триггер 18, В счетчик 14 по шине 20 загружают количество шагов разгона D, а в счетчик 13 по шине 21 - величину ускорения П,., Счетчик 14 загружается перед началом каждого из режимов работы, что позволяет получать различные траектории движения исполнительного органа
0
5
0
5
ь1
Тригч рр 17 сбр(1шеи сигналом с выхода триггера 18,
В режиме Раягон сигналом на тине 1 5 управления llycic разрешают счет счетчику К, я сигнал логического О на выходе триггера 17 чере элемент НЕ 16 разрешает счет счетчику 13 и разрешает прохождение опорной частоты с тины 12 управления через элемент И 7,, Через элемент И 6 на счетный вход счетчика 1 проходит опорная частота Сигналом на шине 10 управления Ускорение разрешает прохождение импульсов опорной частоты на вход прямого счета счетчика 2 через элемент И 3, а через элемент 1ШИ 8 они проходят на счетный вход счетчика 13а По обнулению счетчика 13 устанавливается триггер 17 и запрещается счет счетчика 2, и его содержимое становится равным разности
K-DC. ,
Первый управляющий импульс появляется на вьгходе счетчика 1 через время равное
Т
«с-кс -. р
По этому импульсу сбрасьгаается триггер 17, разрешается счет счетчикам 2 и 13, а в счетчик 1 загружается коэффициент деления, равньй К-П По второму управляющему импульсу в счетчик 1 загружается коэффициент деления : 2, по третьему - K-DCH 3, и так далее до достижения требуемой частоты управляющих импульсов „ По обнулению счетчика 14 вырабатывается сигнал на шине 19, указывающий на окончание режима разгона, в котором была достигнута требуемая частота управляющих сигналов перемещения исполнительного органа Рц,д за заданное число перемещений D (участок ОА на фиГо2),
В режиме Постоянная скорость в счетчик 14 загружают число, равное требуемому количеству импульсов управления исполнительным органом. Сигнал на шине 19 сбрасывает триггер 18, сигнал с выхода которого устанавливает триггер 17, и запрещается прохождение импульсов опорной частоты через элемент И 7 на счетные входы счетчиков 2 и 13„ Состояние счетчика 2 не изменяется, и коэффициент деления счетчика 1 в режиме постоян- й скорости неизменен (участок АВ
76
на фиг , 2 ) По обнулент-по счетчика 14 устлнанлии. триггер 18, и устройство переходит в режим торможения.
В режиме постоянной скорости путем подачи сигнала на гаину 10 управления Ускорение можно перевести устройство в режим разгона и получить увеличение частоты управляющих импульсов (дополнительный разгон),которое может потребоваться, например,при возникновении аварийных ситуаций в работе сканирующего устройства,когда требуется быстрый выход измерительного блока из зоны аварии,
В режиме Торможение работа устройства аналогична режиму Разгон с той разницей, что сигналом на гаине 11 Замедление разрешают прохождеиие импульсов опорной частоты не на прямой, а на обратный счетный вход счетчика 2 через элемент И 4, и происходит увеличение коэффициента деления счетчика 1 и, соответственно,снижение частоты управляющих и пульсов (участок ВС на фиг,,2)
При возникновении ситуаций, когда требуется более бьгстрое торможение, чем разгон, траекторию торможения
меняют с помощью изменения величины DCK (участок ВС, на фиг,2)„
При изменении требований к скорости перемещения исполнительного органа, но неизменном количестве тагов
разгона, изменив величину D, добиваются разгона и торможения на более крутой траектории (ОА В С на фиг,2).
Формула изобретения
0
Устройство для программного управления скоростью шагового электропривода, содержащее первый и второй счетчики импульсов, пять элементов И,
элемент ИЛИ, четыре щины управления, Установка в О, Опорная частота, Ускорение, Замедление, при этом входы установки в О первого и второго счетчиков соединены с шиной упQ равления Установка в О, вход прямого счета второго счетчика соединен с выходом первого элемента И, а вход обратного счета - с выходом второго элемента И, отличающееся
, тем, что, с целью расширения области применения за счет получения переменных и различающихся между собой тра- ,екторий и скоростей режимов разгона и торможения, дополнительно содержит
третий и четвертый счетчики импульсов, шину управления Пуск, элемент НЕ и два RS-триггера, при этом входы параллельной загрузки первого счет- чика импульсов соединены с выходом второго счетчика импульсов, вход разрешения записи которого соединен с выходом третьего элемента И и с входом установки в О первого RS-триг- гера, а выход прямого счета первого счетчика импульсов - с выходом четвертого элемента И, выход переполнения первого счетчика импульсов соединен с выходом устройства, счетный выход третьего счетчика импульсов соединен с выходом элемента ИЛИ,входы которого соединены с выходами первого и второго элементов И соответственно, выход переноса третьего счетчи ка импульсов соединен с тактовым входом первого RS-триггера, а вход разрешения счета - с выходом элемента НЕ вход которого соединен с выходом первого RS-триггера, вход разрешения счета четвертого счетчика импульсов соединен с шиной управления Пуск, его счетный вход
соединен с выходом первого счетчика импульсов, а выход - с тактовым входом второго КП-триггера,выход которого соединен с установочным входом первого RS-триггера, устаноиочный вход второго RS-триггера соединен с шиной управления Установка в О, вход установки в О первого Ro-триг- гера соединен с выходом третьего элемента И, первый вход которого соединен с шиной управления Установка
О
а второй вход - с выходом
первого счетчика импульсов, первый вход пятого элемента И соединен с шиной управления Опорная частота, второй вход - с выходом элемента НЕ, а выход - с первыми входами первого и второго элементов И, вторые входы которого соединены соответственно с шинами управления Ускорение и Замедление, входы третьего и четвертого счетчиков импульсов подключены соответственно к шинам их параллель ой загрузки, первый вход третьего элемента И соединен с шиной управления Опорная частота, а второй вход - с шиной управления Установка в О.
ДУ
Фиг.1
FUJAZ
u/4t
9иг.2
С с 2)
| Устройство для регулированиячАСТОТы | 1978 |
|
SU807223A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для программного управления скоростью шагового электропривода | 1983 |
|
SU1137444A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
