ЙМИ«
усхор
V/WC«Z7
l J«--y {g ASaflas
j-T:n
4
САд
О 00
згон
Изобретение относится к автоматике и вычислительной технике и может быть использовано в магистраль- но-модульных системах программного управления электропрршодом, например в графопостроителях, координатных столах, автоматах с программным управлением или промышленных роботах.
; Цель изобретения - снижение затрат при тестировании и отладке технологического оборудования, i На фиг, 1 представлена структур- |но-функциональная схема модуля; на I фиг. 2 - структура регистра задания на фиг. 3 - структурная схема муль- типлексора на фиг, 4 - график от- I работки заданного перемещения; на 1ФИГ. 5 - возможные направления пере- Iщения в зависимости от значений ;управляющих входов мультиплексора. ; Программно-управляемый модуль i (фиг, 1) содержит генератор 3 импульсов, первый и второй управляемые делители 2 и 3 частоты, регистр 4 задания, реверсивный счетчик 5 импульсов, суммируюпшй счетчик 6 импульсов разгона, вычитающий счетчик
7импульсов перемещения, блок 8 совпадения, первый формирователь 9 импульсов, мультиплексор 10, первый и второй элементы И 11 и 12, RS-триг- гер 13, первый элемент ИЛИ 14, ы- читагощий счетчик J 5 импульсов максимальной скорости, регистр 16 минимальной скорости, второй формирователь 1 7 импульсов, первый и второй D-триггеры 18 и ,19, третий и четвертый элементы И 20 и 21, второй
и третий элементы ИЛИ 22 и 23, индикаторы аварии 24, разгона 25, тор- йожения 26, постоянной скорости 27 и магистрали данных 28, коммутатор 29, блок 30 клавиатуры, выполненный в виде наборного поля и первую 31 и вторую 32 магистрали данных.
В качестве управляемых делителей 2 и 3 частоты может быть использована микросхема 155 ИЕ8 6К0.348,006ТУ у которой коэффициент деления зависит от кода на управляющих входах,
8модуле может быть также применена микросхема, например Программируемы таймер КР 580 БИ 53,.На одной такой микросхеме можно одновременно реализовать вьмитающий счетчик 15 импульсов максимальной скорости, вычитающий счетчик 7 импульсов перемещения
0
5
0
5
0
5
0
5
0
5
и первый формирователь 9, При этом дополнительно расширяются функциональные возможности модуля, так как указанная микросхема позволяет хранить первоначально занесенные коды. Следовательно, отпадает необходимость задания величины максимальной скорости и величины перемещения в начале каждого цикла перемещения, например значение величин максимальной и минимальной скоростей перемещения может быть задано один раз в начале работы, что повышает быстродействие модуля.
Генератор 1 вырабатывает постоянную частоту, причем его первый выход является выходом опорной частоты, которая преобразуется первым управляемым делителем 2 частоты в выход- ную частоту, а второй вькод - выходом частоты разгона-торможения, которая преобразуется вторым управляемым де лителем 3 частоты в частоту счета реверсивного счетчика 5 импульсов, последняя характеризует величину ускорения разгона-торможения.
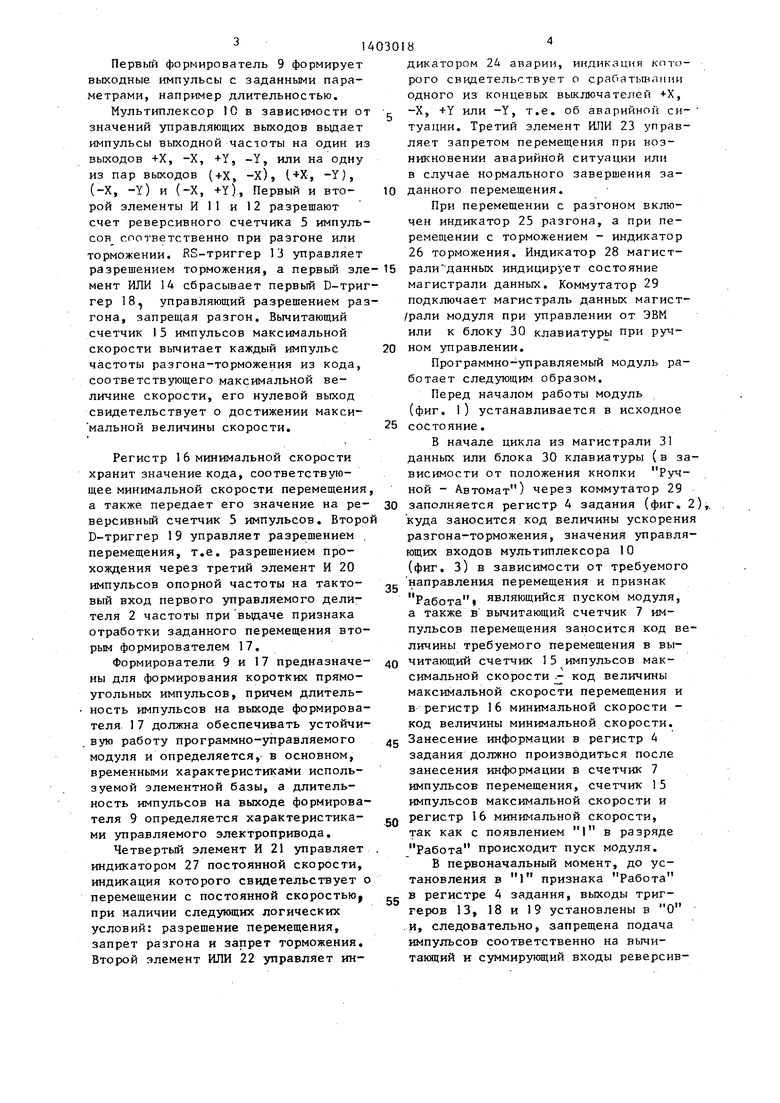
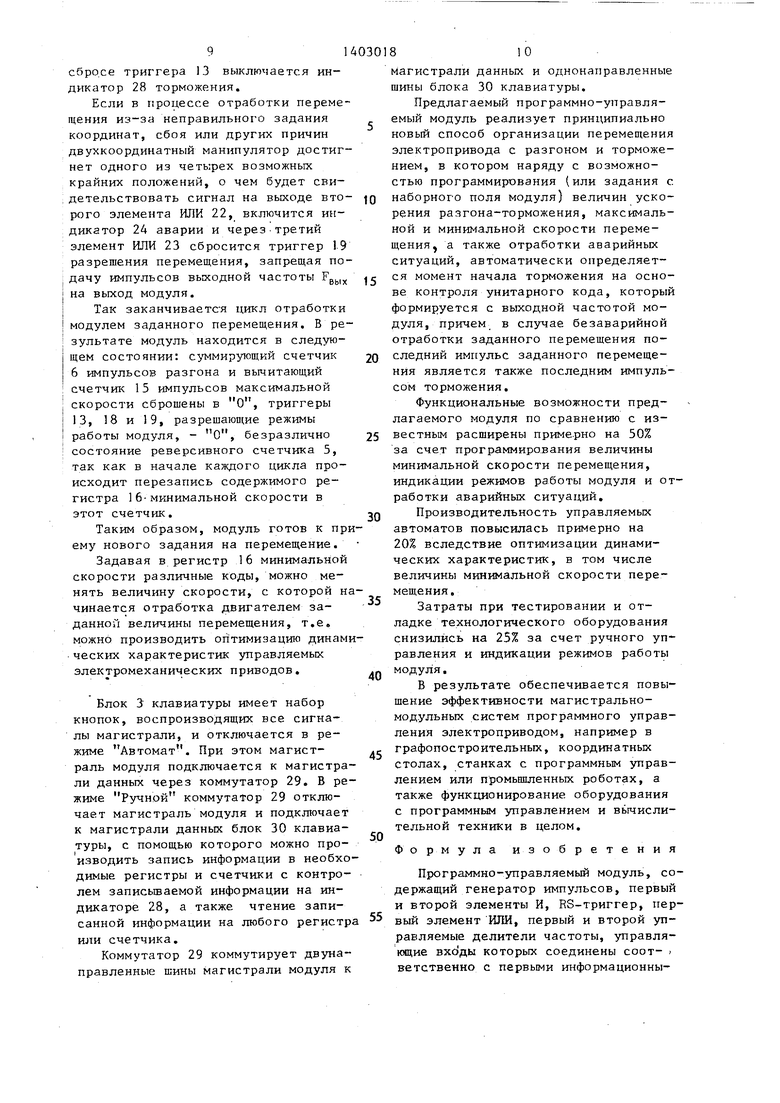
Регистр 4 задания принимает с магистрали 31 данных и хранит код величины ускорения разгона-торможения, определяющий коэффициент деления второго управляемого делителя 3 частоты, а также значения управляющих сигналов +Х, -Х, +Y, -Y для мультиплексора 10 и признак Работа определяющий состояние шины Разрешение разгона.
Реверсивный счетчик 5 импульсов суммирует импульсы частоты разгона- торможения при разгоне и вычитает при торможении, его разрядные выходы определяют коэффициент деления первого управляемого делителя 2 частоты.
Суммирующий счетчик 6 импульсов разгона ведет подсчет импульсов разгона, а вычитающий счетчик 7 импульсов перемещения вычитает каждый импульс выходной частоты из величины заданного перемещения, причем его нулевой вькод свидетельствует об окончании отработки заданного перемещения.
Блок 8 совпадения определяет момент начала торможения путем сравнения текзддего кода вычитающего счет- чшса 7 импульсов перемещения с числом импуЛьсов разгона суммирующего счетчика 6 импульсов разгона.
Первый формирователь 9 формирует вькодные импульсы с заданными параметрами, например длительностью.
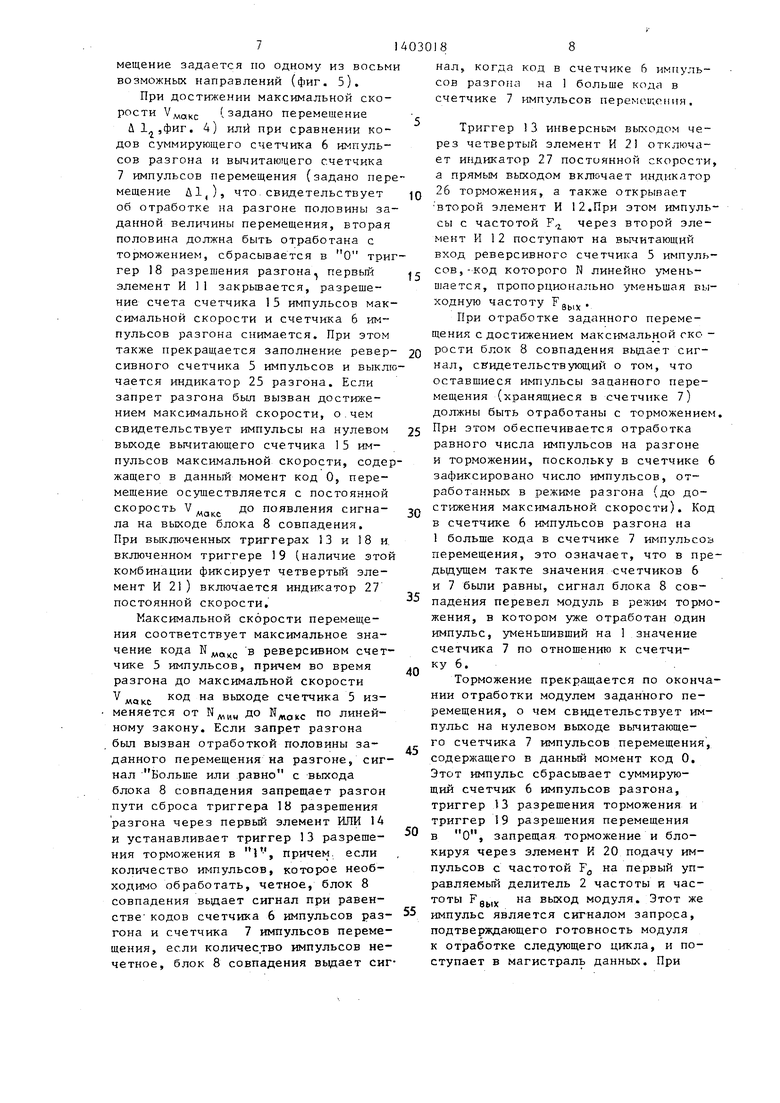
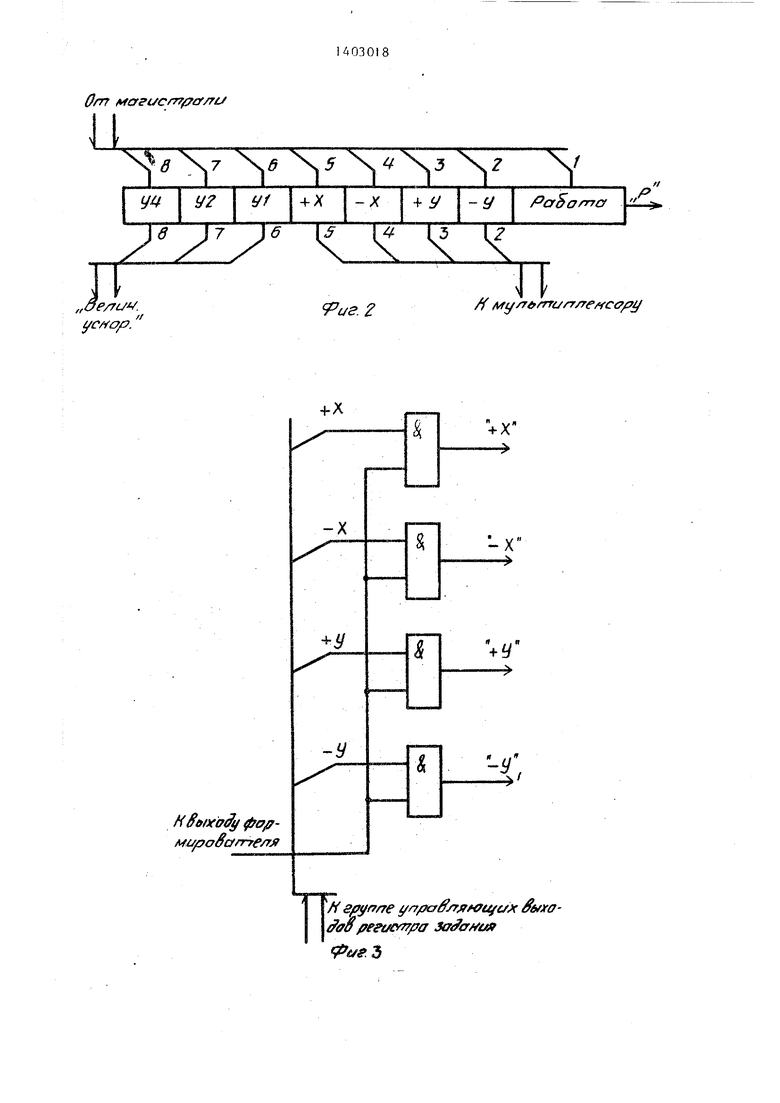
Мультиплексор 10 в зависимости от значений управляющих выходов вьщает импульсы выходной частоты на один из выходов +Х, -X, +Y, -Y, или на одну из пар выходов (+х, -Х), i+X, -Y), (-Х, -Y) и (-Х, +Y), Первый и второй элементы И 11 и 12 разрешают счет реверсивного счетчика 5 импуль- сов соответственно при разгоне или торможении. RS-триггер 13 управляет разрешением торможения, а первый эле мент ИЛИ 14 сбрасывает первый D-триг гер 18 управляющий разрешением разгона, запрещая разгон. Вычитающий счетчик 15 импульсов максимальной скорости вычитает каждый импульс частоты разгона-торможения из кода, соответствующего максимальной величине скорости, его нулевой выход свидетельствует о достижении макси- мальной величины скорости.
Регистр 1 6 минимальной скорости хранит значение кода, соответствующее минимальной скорости перемещения, а также передает его значение на реверсивный счетчик 5 импульсов. Второй D-триггер 19 управляет разрешением перемещения, т.е. разрешением прохождения через третий элемент И 20 импульсов опорной частоты на тактовый вход первого управляемого делителя 2 частоты при вьщаче признака отработки заданного перемещения вторым формирователем 17.
Формирователи 9 и 17 предназначены для формирования коротких прямоугольных импульсов, причем длитель- ность импульсов на выходе формирователя. 17 должна обеспечивать устойчи- вую работу программно-управляемого модуля и определяется, в основном, временными характеристиками используемой элементной базы, а длительность импульсов на выходе формирователя 9 определяется характеристиками управляемого электропривода.
Четвертый элемент И 21 управляет . индикатором 27 постоянной скорости, индикация которого свидетельствует о перемещении с постоянной скоростью, при наличии следующих логических условий: разрешение перемещения, запрет разгона и запрет торможения. Второй элемент ИЛИ 22 управляет индикатором 24 аварии, индикация которого свидетельствует о срабатьюаини одного из концевых выключателей +Х,
0
5
0
5
0
5
0
0
5
-X, +Y или -Y, т.е. об аварийной си- туации. Третий элемент И.ПИ 23 управляет запретом перемещения при возникновении аварийной ситуации или в случае нормального завершения заданного перемещения.
При перемещении с разгоном включен индикатор 25 разгона, а при перемещении с торможением - индикатор 26 торможения. Индикатор 28 магистрали данных индицирует состояние магистрали данных. Коммутатор 29 подключает магистраль данных магист- /рали модуля при управлении от ЭВМ или к блоку 30 клавиатуры при ном управлении.
Программно-управляемый модуль работает следующим образом.
Перед началом работы модуль (фиг. 1) устанавливается в исходное состояние.
В начале цикла из магистрали 31 данных или блока 30 клавиатуры (в зависимости от положения кнопки Ручной - Автомат) через коммутатор 29 заполняется регистр 4 задания (фиг. 2),. куда заносится код величины ускорения разгона-торможения, значения управляющих входов мультиплексора 10 (фиг. З) в зависимости от требуемого направления перемещения и признак Работа являющийся пуском модуля, а также в вычитающий счетчик 7 импульсов перемещения заносится код величины требуемого перемещения в вычитающий счетчик I5 импульсов максимальной скорости .- код величины максимальной скорости перемещения и в регистр 16 минимальной скорости - код величины минимальной скорости. 5 Занесение информации в регистр 4 задания должно производиться после занесения информации в счетчик 7 импульсов перемещения, счетчик 15 импульсов максимальной скорости и регистр 16 минимальной скорости, так как с появлением 1 в разряде Работа происходит пуск модуля.
В первоначальный момент, до установления в 1 признака Работа в регистре 4 задания, выходы триггеров 13, 18 и 19 установлены в О и, следовательно, запрещена подача импульсов соответственно на вычи- такнций и суммирующий входы реверсивного счетчика 5 и на вход первого управляемого делителя 2,
На тактовые входы первого и второго управляемых делителей 2 и 3 частоты подается соответственно опорная частота F через третий элемент И 20 (максимально допустимая часто - та на выходе модзшя) и частота разгона-торможения F (максимально-допустимая qacTOTaj соответствующая максимальному ускорению разгона-торможения модуля),
Выходные частоты FQ и F являютс независимыми, поскольку обеспечиваьзт независимые параметры: F - скорост перемещения электропривода, F,, -величину ускорения при разгоне-торможении При этом частота F выбирается по максимально допустимой скорости перемещения электропривода и равна максимально допустимой частоте на координатных выходах модуля, а частота F -по максимально допустимой величине ускорения разгона-торможения
Частота импульсов на выходах управляемых делителей частоты определяется коэффициентом деления - кодом, поступающим на их управляющие входы Частоты импульсов на вы- .ходе второго управляемого делителя 3 частоты
тг
2п- Ft 2Кгде п - код, соответствующий заданному ускорению разгона- гомрожения, поступающий из р€;гистра 4 задания, на управ- ляющие входы делителя 3 час-ТОТЫе
Импульсы с постоянной частотой
F
соответствующей заданному ускоПри этом траектории разгона и
рению,, поступают на первые входы пер- торможения максимально приближены к
вого и второго элементов И П и 12, При установлении признака Работа регистра 4 .задания в 1 второй формирователь I7 формирует короткий импульс, который перезаписьтает значение минимальной скорости перемещения из регистра }6 минимальной скорости в реверсивный счетчик 5« По заднему фронту этого импульса происходит установка триггеров 18 и 19 в „ При этом триггер 8 включает индикатор 25 разгона, а также открЫ вает первьш элемент И П. Частота, соответствующая коду величины уско
50
55
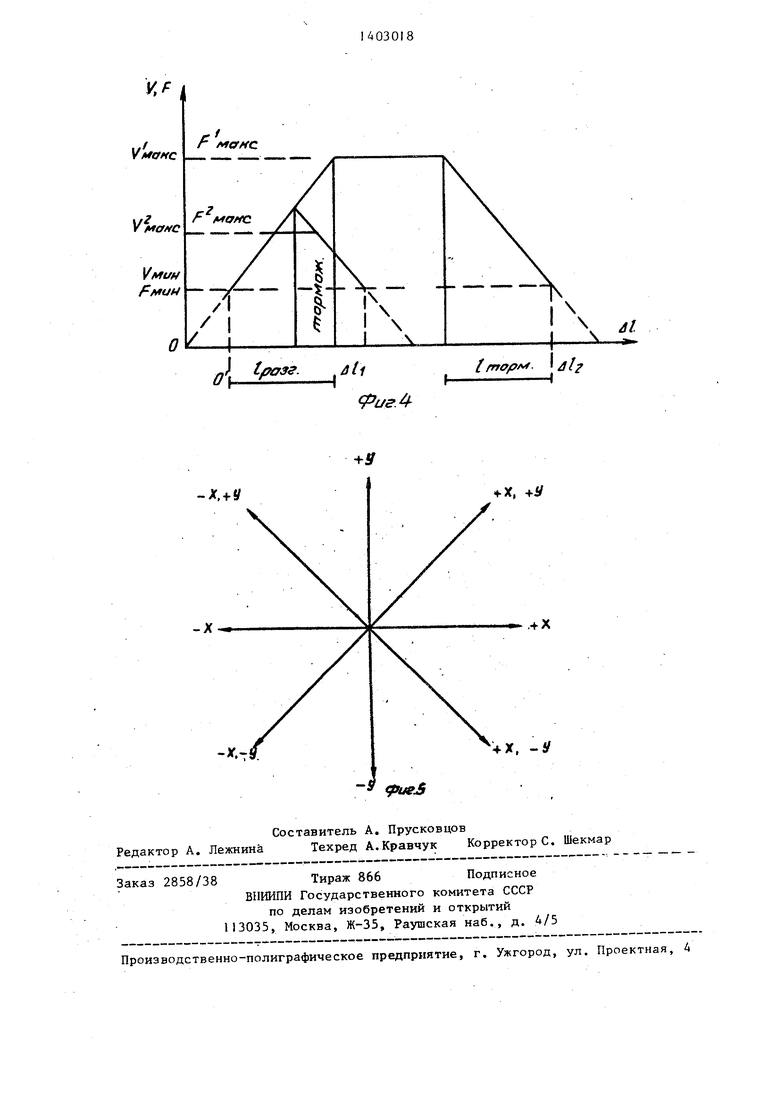
естественным траекториям разгона и торможения электроприводов, обеспечивая оптимальность управления.
Импульсы выходной частоты Fp формируются первым формирователем 9 импульсов, с выхода которого с заданной длительностью, например 0,5 МКС, поступают на вход мультиплексора 10 (фиг, 3) Сформированные импульсы выходной частоты комму тируются в мультиплексоре 10 в соот ветствии со значениями управляющих входив, определенными регистром 4 задания {фиг, 2) При этом пере
0
5
0
5
..
рения разгона-торможения, т.е. коэф- фнциенту деления второго управляемого делителя 3 .частоты, подается на суммирующий вход реверсивного счетчика 5 импульсов.
Импульсы на суммирующий вход реверсивного счетчика 5 будут поступать до тех пор, пока из первого элемента ИЛИ 14 не поступит сигнал сброса разрешения разгона, т,е, сброса триггера 18, которьй также разрешит счет суммирующему счетчику 6 импульсов разгона и вычитающему счетчику 15 импульсов максимальной скорости, Таким образом, в суммирующем счетчике 6 импульсов разгона будет храниться информация о количеству импульсов, поступающих на вход модуля за время разгона, Эти же импульсьэ поступают на вычитающий счетчик 7 импульсов перемещения, где всегда хранится количество импульсов, которое необходимо отработать до завершения цикла 1
Одновременно с заполнением реверсивного счетчика 5 происходит вычитание с этой же частотой вычитающего счетчика 5 импульсов максимальной скорости.
Включенный триггер 19 открьшает третий элемент И 20j разрешая подачу частоты F на вход первого уп равляемого .делителя 2 частоты, на управляющие входы которого поступает текущий код числа N реверсивного счетчика -5 импульсов: ; Следовательно, вьЕходная частота будет изменяться пропорционально числу N.:
V бых 2
При этом траектории разгона и
торможения максимально приближены к
естественным траекториям разгона и торможения электроприводов, обеспечивая оптимальность управления.
Импульсы выходной частоты Fp формируются первым формирователем 9 импульсов, с выхода которого с заданной длительностью, например 0,5 МКС, поступают на вход мультиплексора 10 (фиг, 3) Сформированные импульсы выходной частоты коммутируются в мультиплексоре 10 в соответствии со значениями управляющих входив, определенными регистром 4 задания {фиг, 2) При этом пере7
мещение задается по одному из восьми возможных направлений (фиг. 5),
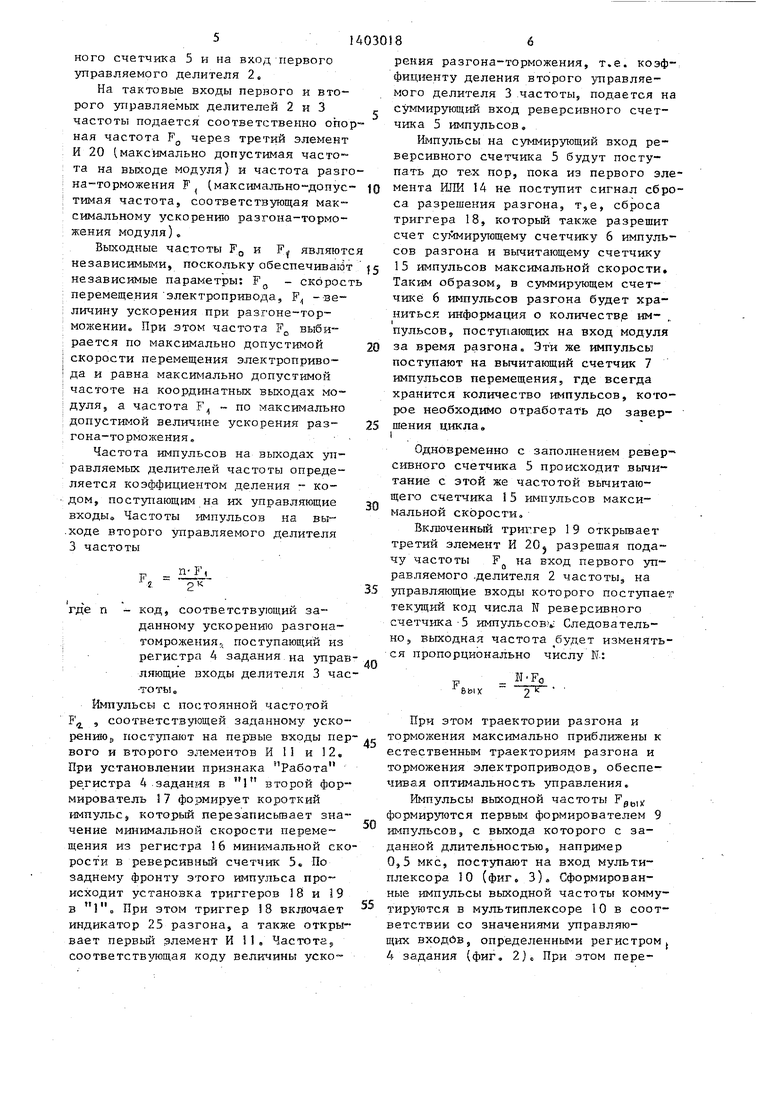
При достижении максимальной скорости Удддц. (задано перемещение
U 1,фиг. 4) или при сравнении кодов суммирующего счетчика 6 импульсов разгона и вычитающего счетчика 7 импульсов перемещения (задано перемещение Д1|), что.свидетельствует об отработке на разгоне половины заданной величины перемещения, вторая половина должна быть отработана с торможением, сбрасывается в О триггер 18 разрешения разгона., первьй элемент И 1 закрьшается, разрешение счета счетчика 15 импульсов максимальной скорости и счетчика 6 импульсов разгона снимается. При этом также прекращается заполнение реверсивного счетчика 5 импульсов и выключается индикатор 25 разгона. Если запрет разгона был вызван достижением максимальной скорости, о.чем свидетельствует импульсы на нулевом выходе вычитающего счетчика 15 импульсов максимальной скорости, содержащего в данный момент код О, перемещение осуществляется с постоянной
1
скорость V ..„ до появления сигнагла КС
ла на выходе блока 8 совпадения. При выключенных триггерах 13 и 18 и. включенном триггере 19 (наличие этой комбинации фиксирует четвертый элемент И 21) включается индикатор 27 постоянной скорости.
Максимальной скорости перемещения соответствует максимальное значение кода fi в реверсивном счетчике 5 импульсов, причем во время разгона до максимальной скорости
выходе счетчика 5 из
до N
макс
по линейному закону. Если запрет разгона бьш вызван отработкой половины заданного перемещения на разгоне, сигнал Больше или равно с выхода блока 8 совпадения запрещает разгон пути сброса триггера 18 разрешения разгона через первый элемент ИЛИ 14 и устанавливает триггер 13 разреще- ния торможения в 1, причем, если количество импульсов, которое необходимо обработать, четное, блок 8 совпадения вьщает сигнал при равенстве кодов счетчика 6 импульсов разгона и счетчика 7 импульсов перемещения, если количество импульсов нечетное, блок 8 совпадения вьщает сиг
ю403018 нал
15
20
25
30
35
40
45
50
55
, когда код в счетчике 6 импульсов разгона на 1 больше кода в счетчике 7 импульсов перемещения.
Триггер 3 инверсным выходом через четвертый элемент И 21 отключает индикатор 27 постоянной скорости, а прямым выходом включает индикатор 26 торможения, а также открывает второй элемент И 12,При этом импульсы с частотой F через второй элемент И 12 поступают на вычитающий вход реверсивного счетчика 5 импульсов, -код которого N линейно уменьшается, пропорционально уменьшая выходную частоту Fgj, .
При отработке заданного перемещения с достижением макс1{мальн ой око - рости блок 8 совпадения вьщает сигнал, свидетельствующий о том, что оставшиеся импульсы заданного перемещения (хранящиеся в счетчике 7) должны быть отработаны с торможением. При этом обеспечивается отработка равного числа импульсов на разгоне и торможении, поскольку в счетчике 6 зафиксировано число импульсов, отработанных в режиме разгона (до достижения максимальной скорости). Код в счетчике 6 импульсов разгона на 1 больше кода в счетчике 7 импульсов перемещения, это означает, что в предыдущем такте значения счетчиков 6 и 7 бьши равны, сигнал блока 8 совпадения перевел модуль в режим торможения, в котором уже отработан один импульс, уменьшивший на 1 значение счетчика 7 по отношению к счетчику 6,
Торможение прекращается по окончании отработки модулем заданного перемещения, о чем свидетельствует импульс на нулевом выходе вычитающего счетчика 7 импульсов перемещения, содержащего в данный момент код О, Этот импульс сбрасьгоает суммирующий счетчик 6 импульсов разгона, триггер 13 разрешения торможения и триггер 19 разрешения перемещения в О, запрещая торможение и блокируя через элемент К 20 подачу импульсов с частотой Тд на первый уп- равляемьй делитель 2 частоты и частоты Fg, на выход модуля. Этот же импульс является сигналом запроса, подтверждающего готовность модуля к отработке следующего цикла, и поступает в магистраль данных. При
91
сбросе триггера 13 выключается индикатор 28 торможения.
Если в процессе отработки перемещения из-за неправильного задания координат, сбоя или других причин двухкоординатный манипулятор достигнет одного из четырех возможных крайних положений, о чем будет сви- ; детельствовать сигнал на выходе вто- рого элемента ИЛИ 22, включится индикатор 24 аварии и через Третий элемент ИЛИ 23 сбросится триггер 19 разрешения перемещения, запрещая по- ; дачу импульсов вьжодной частоты Fgy I на выход модуля.
i Так заканчивается цикл отработки I модулем заданного перемещения. В ре- I зультате модуль находится в следую- i щем состоянии: суммирующий счетчик I 6 импульсов разгона и вычитающий счетчик 15 импульсов максимальной ; скорости сброшены в О, триггеры I 13, 18 и 19, разрешающие режимы I работы модуля, - О, безразлично : состояние реверсивного счетчика 5, так как в начале каждого цикла происходит перезапись содержимого регистра 16-минимальной скорости в этот счетчик.
Таким образом, модуль готов к приему нового задания на перемещение.
Задавая в регистр 16 минимальной скорости различные коды, можно менять величину скорости, с которой начинается отработка двигателем заданной величины перемещения, т.е. можно производить оптимизацию динамических характеристик управляемых электромеханических приводов.
Блок 3 клавиатуры имеет набор кнопок, воспроизводящих все сигналы магистрали, и отключается в режиме Автомат. При этом магист- раль модуля подключается к магистрали данных через коммутатор 29. В режиме Ручной коммутатор 29 отключает магистраль модуля и подключает к магистрали данных блок 30 клавиа- туры, с помощью которого можно про- изводить запись информации в необходимые регистры и счетчики с контролем записьшаемой информации на индикаторе 28, а также чтение записанной информации на любого регистр или счетчика.
Коммутатор 29 коммутирует двунаправленные шины магистрали модуля к
0 5 Q
,.
с
5
810
магистрали данных и однонаправленные
шины блока 30 клавиатуры.
Предлагаемый программно-управляемый модуль реализует принципиально новый способ организации перемепщния электропривода с разгоном и торможением, в котором наряду с возможностью программирования (или задания с наборного поля модуля) величин ускорения разгона-торможения, максимальной и минимальной скорости перемещения, а также отработки аварийных ситуаций, автоматически определяется момент начала тори южения на основе контроля унитарного кода, который формируется с выходной частотой модуля, причем, в случае безаварийной отработки заданного перемещения последний импульс заданного перемещения является также последним импульсом торможения.
Функциональные возможности предлагаемого модуля по сравнению с известным расширены примерно на 50% за счет программирования величины минимальной скорости перемещения, индикации режимов работы модуля и отработки аварийных ситуаций.
Производительность управляемых автоматов повысилась примерно на 20% вследствие оптимизации динамических характеристик, в том числе величины минимальной скорости перемещения.
Затраты при тестировании и отладке технологического оборудования снизились на 25% за счет ручного управления и индикации режимов работы модуля.
В результате обеспечивается повышение эффективности магистрально- модульных систем программного управления электроприводом, например в графопостроительных, координатных столах, станках с программным управлением или промьшшенных роботах, а также функционирование оборудования с программным управлением и вьгчисли- тельной техники в целом.
Формула изобретения
Программно-управляемый модуль, содержащий генератор импульсов, первый и второй элементы И, RS-триггер, первый элемент ИЛИ, первый и второй управляемые делители частоты, управляющие вxdды которых соединены соот- ветственно с первыми информационны ми выходами реверсивного счетчика импульсов и регистра задания, вторые информационные выходы регистра задания соединены с управляющими вхо дами мультиплексора, тактовый вход которого соединен с выходом первого формирователя импульсов, первые и вторые информационные входы блока совпадения соединены соответственно с информационными выходами суммирующего счетчика импульсов разгона и вычитающего счетчика импульсов перемещения, выход нуля которого соединен с шиной Конец работы, выход нуля вычитающего счетчика импульсов максимальной скорости соединен с первым входом первого элемента ИЛИ, информационные входы регистра задания соединены с первой магистралью дан- ных, с которой также соединены информационные входы вычитающих счетчиков импульсов перемещения и максимальной скорости, первые входы первого и второго элементов И соединены с выходом второго управляемого делителя частоты, второй вход второго элемента И соединен с прямым выходом RS-триггера, выходы первого и второг элементов И соединены соответственно с суммирующим и вычитающим входами реверсивного счетчика импульсов, выг ход первого делителя частоты соединен с входом первого формирователя . импульсов,- отличающий- с я тем, что, с целью снижения затрат при тестировании и- отладке технологического оборудования, в него введены вторая магистраль данных, регистр минимальной скорости, второй формирователь импульсов, первый и второй D-триггеры, третий и четвертый элементы И, второй и третий элементы ИЛИ, первый - пятый индикаторы коммутатор и блок клавиатуры, инфор- мационные выходы которого соединены с первыми информационными входами коммутатора, вторые информационные входы которого соединены с второй магистралью данных, коммутируе- мые входы коммутатора и первый индикатор соединены с первой магистралью данных, первый и второй входы третьего элемента И соединены соответственно с первым выходом генератора импульсов, первым входом четвертого элемента И и прямым выходом первого D-триггера, выход третьего элемента И соединен с входом первого управляемого делителя частоты, второй и третий входы четвертого элемента И соединены с инверсными выходами соответственно второго D-триггера и RS-триггера, выход четвертого элемента И соединен с вторым 1}нднК атором, входы сброса первого и
второго D-триггеров соединены соответственно с выходом второго элемента ИЛИ и выходом первого элемента ИЛИ, прямой выход вторюго D-триггера соединен с входом разрешения счета вычитающего счетчика импульсов максШ «альной скорости, вторым входом первого элемента И, третьим индикатором и входом разрешения счета суммирующего счетчика импульса разгона, С-входы первого и второго D-триггеров соединены с управляющим входом реверсивного счетчика импульсов и через второй формирователь импульсов с выходом регистра задания, D-входы первого и второго Б-триге- геров постоянно соединены с шиной уровня логической единицы, выход второго управляемого делителя частоты соединен с вычитающим входом счетчика импульсов максимальной скорости S-вход RS-триггера соединен с вторым входом первого элемента ИЛИ и выходом блока совпадения, R-вход ES-триг гера соединен с первым входом второг элемента ИЛИ и шино.й Конец работы, прямой выход RS-триггера соединен с входом четвертого индикатора, второй вход второго элемента Р1ЛИ соединен с входом пятого индикатора и выходом третьего элемента ИЛИ, входы которог соединены с соответствующими входами программно-управляемого модуля, вход регистра минимальной скорости соединен с первой магистралью данных, а выходы - с информационными входами реверсивного счетчика импульсов.
От аг1/с/77 сг/гс/
LI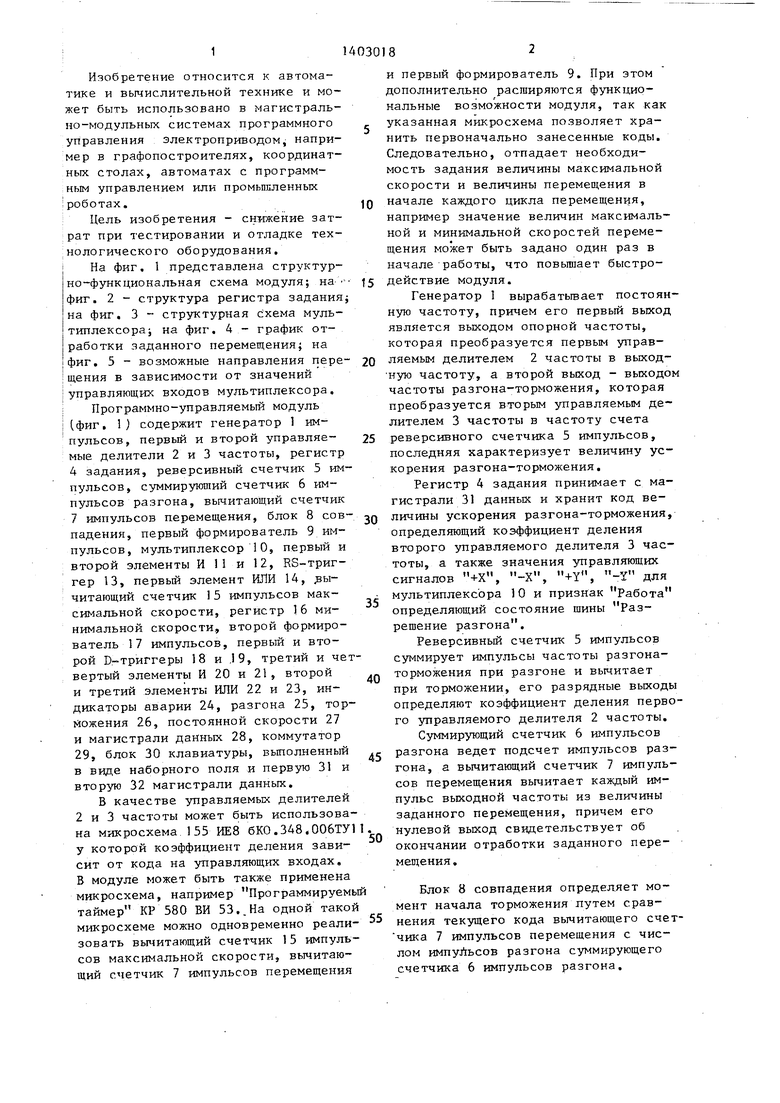
| название | год | авторы | номер документа |
|---|---|---|---|
| Программно-управляемый модуль | 1986 |
|
SU1405028A1 |
| Программно-управляемый модуль | 1986 |
|
SU1327066A1 |
| Модуль для программного управления электроприводом | 1987 |
|
SU1509832A1 |
| Программно-управляемый модуль | 1986 |
|
SU1327060A1 |
| Устройство для разгона и торможения двигателя исполнительного механизма | 1986 |
|
SU1361507A1 |
| Устройство для разгона и торможения электропривода | 1986 |
|
SU1386964A1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2010293C1 |
| Устройство для автоматического разгона и замедления двигателя станка с программным управлением | 1983 |
|
SU1120287A1 |
| Устройство для программного управления | 1986 |
|
SU1397880A1 |
| Устройство для программного управления скоростью подачи | 1982 |
|
SU1067473A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано в магист- рально-модульных системах программного управления электроприводом.Целью изобретения является снижение затрат при тестировании и отладке технологического оборудования. Программно-управляемый, модуль содержит генератор 1 импульсов, первый 2 и второй 3 управляемые делители частоты, регистр 4 задания, реверсив- ный счетчик 5, суммирующий счетчик 6 импульсов разгона, вычитающий счетчик 7 импульсов перемещения, блок 8 совпадения, первый формирователь 9 импульсов, мультиплексор 10, первый 11 и второй 12 элементы И, RS-триггер 13, первый элемент ИЛИ 14, вычитающий счетчик 15 импульсов максимальной скорости,регистр 16 минимальной скорости, второй формирователь 17 импульсов, первый В-три1 гер 18, третий элемент И 20, второй D-триггер 19, четвертый элемент И 21, второй 22 и третий 23 элементы ИЛИ индикаторы аварии 24, разгона 25, торможения 26, постоянной скорости 27 и магистрали 28 данных. Преимущество изобретения состоит в расширении функциональных возможностей, повышении производительности управляемых автоматов и снижении затрат при тестировании и отладке технологического оборудования. 5 ил. (Л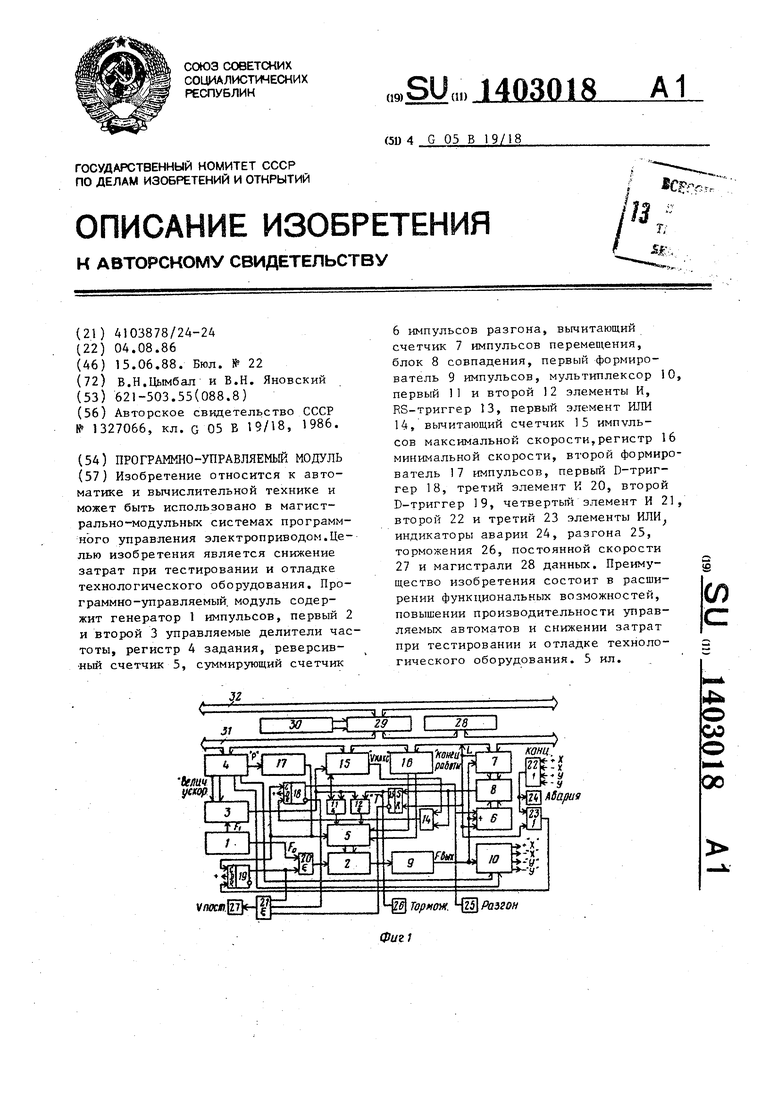
vv ч
,,ae/7U. e/Cffo/y.
//
ue.2
I/у e/yyffrre rfpaffjr tyc б/жо- e ffQpeet Y pa Л7 л5свр
5
//
.f
п Mi/ fffrrc/rr/reffCffffy
VMOKC
f .
MffftC.
V MOftc
MOffc / ч
FMUH
о
I . fi
-X. + tf
-X -
-if.r
Составитель A. Прусковцов Редактор A. ЛежнинаТехред А.Кравчук Корректоре. Шекмар
t mopf IJ//
.4
X, -bl/
4X, -У
-y Mp
| Программно-управляемый модуль | 1986 |
|
SU1327066A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
