90
(Л
СП
22
00
00
Изибретенме относится к средствам напольного безрельсового транспорта для перемещения грузов внутри про- мьшшенных зданий.
Цель изобретения - уменьшение габаритов и снижение трудоемкости погруз очно-разгрузочных операций.
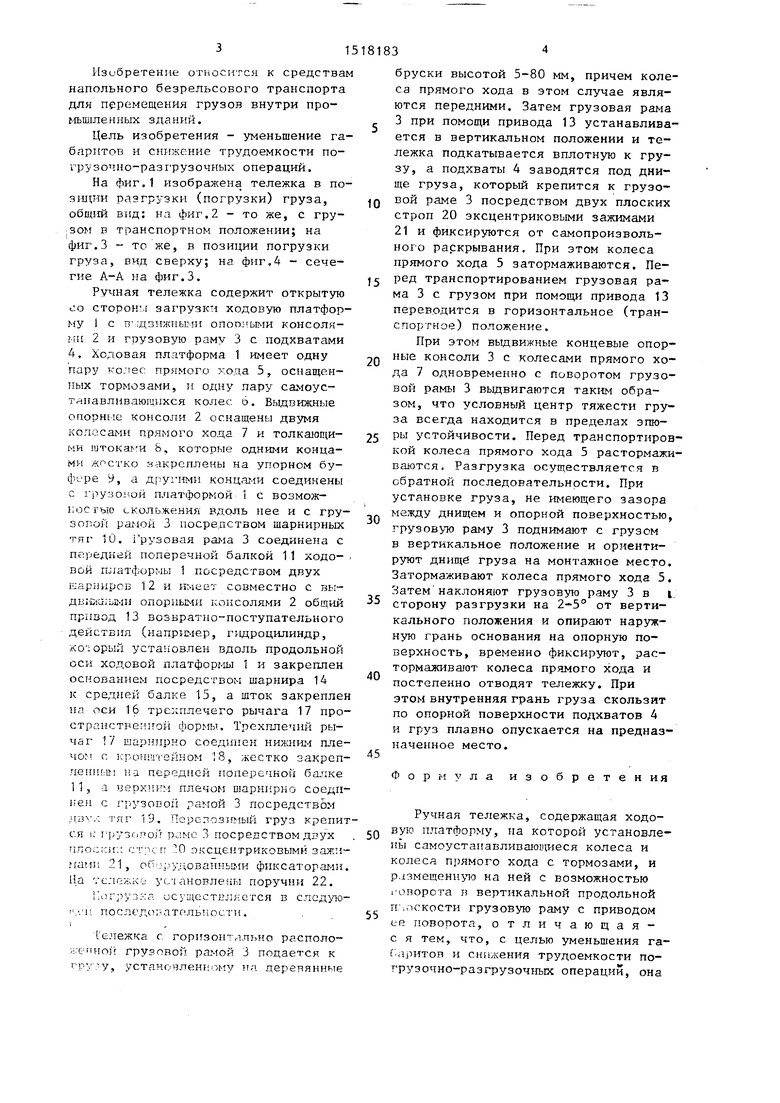
На фиг.1 изображена тележка в по- зши-ш разгрузки (погрузки) груза, общий вид: на фиг.2 - то же, с грузом в транспортном положении; на фиг.З -- то же, в позиции погрузки груза, вид сверху; на фиг,4 - сече- гие А-А на фиг.З.
Ручная тележка содержит открытую tio сторонм загрузки ходовую платформу I с В ;дзижны: 1 опош- ыми консоля- ни 2 и грузовую раму 3 с подхватами 4. Ходовая платформа 1 имеет одну пару ко:гес: прямого хода 5, оснащенных тормозами, и одну пару самоус- танавливаюгаихся колес 6. Вьщвижные опорнЕ-ie консоли 2 оснащены двумя колесами прямого хода 7 и толкающими штокал И 8. которые одними концами жостко закреплены на упорном буфере У, а д)у1 ими концаг-ш соединены с грузолой платформой 1 с возмож- косгью скольжешия вдоль нее и с гру- золой рамой 3 посредством шарнирных тяг 10. Грузовая рама 3 соединена с передней поперечной балкой 11 ходо- вой платформы 1 посредством двух шарнирсаз 12 и совместно с вы- дв;21а-;ы;-1И опорными консолями 2 общий привод 13 возвратно-поступательного действия (например, г щроцилиндр, ко юрый уста1швлен вдоль продольной оси ходовой платформы 1 и закреплен основанием посредством шарнира 14 к средней балке 15, а шток закрепле на оси 16 трехплечего рычага 17 про странстреттой формы. Трехплечий рычаг 17 шарнирно соединен нижнш- плечом с: рон цтейном 18, жестко закрепленным на передней поперечной балке 11, а BepxiufM плечом шарнирно соеди 1;ен с грузово рамой 3 посредством язл .ч тяг 19. Перевозимый груз крепися i; i p /jopoj раме 3 посредством двух Tinocr;ii;: стрсг; -О эксцентриковыми зажи ггами 21, об рудованными фиксатораГ 1И На установлены поручни 22. Г.огрузхс осущестнляется в слсдую .. is последси-ательпости. , 1
1ележка с горизонтально располо- :,:гечной грузовой раг-юй 3 подается к гр-у.у, установленному на деревянные
5
0
5
бруски высотой 5-80 мм, причем колеса прямого хода в этом случае являются передними. Затем грузовая рама 3 при помощи привода 13 устанавливается в вертикальном положении и тележка подкатывается вплотную к грузу, а подхваты 4 заводятся под днище груза, который крепится к грузовой раме 3 посредством двух плоских строп 20 эксцентриковыми зажимами 21 и фиксируются от самопроизвольного раскрывания. При этом колеса прямого хода 5 затормаживаются. Перед транспортированием грузовая рама 3 с грузом при помощи привода 13 переводится в горизонтальное (транспортное) положение.
При этом выдвижные концевые опорные консоли 3 с колесами прямого хода 7 одновременно с поворотом грузовой рамы 3 вьщвигаются тактам образом, что условный центр тяжести груза всегда находится в пределах эпюры устойчивости. Перед транспортировкой колеса прямого хода 5 растормаживаются. Разгрузка осуществляется в обратной последовательности. При установке груза, не имеющего зазора между днищем и опорной поверхностью, грузовую раму 3 поднимают с грузом в вертикальное положение и ориентируют днищб груза на монтажное место. Затормаживают колеса прямого хода 5. Затем наклоняют грузовую раму 3 в L 5 сторону разгрузки на 2-5° от вертикального положения и опирают наружную грань основания на опорную поверхность, временно фиксируют, растормаживают колеса прямого хода и постепенно отводят тележку. При этом внутренняя грань груза скользит по опорной поверхности подхватов 4 и груз плавно опускается на предназначенное место.
0
0
5
Формула изобретения
Ручная тележка, содержащая ходовую платформу, па которой установлены самоустанавливающиеся колеса и колеса прямого хода с тормозами, и размещенную на ней с возможностью 1 оворота li вертикальной продольной плоскости грузовую раму с приводом ее поворота, отличающая- с я тем, что, с целью уменьшения га- Гаритов и снижения трудоемкости по- грузочно-разгрузочных операций, она
/// /// ///,
|К
7 .
| название | год | авторы | номер документа |
|---|---|---|---|
| Ручная тележка-кантователь | 1985 |
|
SU1255495A1 |
| Ручная тележка | 1982 |
|
SU1071500A1 |
| Высокомобильный транспортный робот для перемещения палетированных грузов | 2022 |
|
RU2798652C1 |
| ТРЕЙЛЕР ДЛЯ ТРАНСПОРТИРОВКИ КРУПНОГАБАРИТНЫХ ГРУЗОВ, ПЕРЕНАЛАЖИВАЕМЫЙ ПО ШИРИНЕ И ДЛИНЕ | 1991 |
|
RU2011572C1 |
| СИСТЕМА ПЕРЕВАЛКИ ГРУЗОВ И ПРИГОДНЫЙ ДЛЯ ЭТОГО ЖЕЛЕЗНОДОРОЖНЫЙ ВАГОН | 2007 |
|
RU2393967C9 |
| ЖЕЛЕЗНОДОРОЖНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2593181C1 |
| Транспортная тележка | 1987 |
|
SU1459962A1 |
| КРАН СТРЕЛОВОГО ТИПА | 2006 |
|
RU2305064C1 |
| ВЗВЕШИВАЮЩЕЕ УСТРОЙСТВО НА ТРАНСПОРТНОМ СРЕДСТВЕ | 1993 |
|
RU2091723C1 |
| Способ наклона платформы автопоезда для ее погрузки и разгрузки | 1989 |
|
SU1717434A1 |
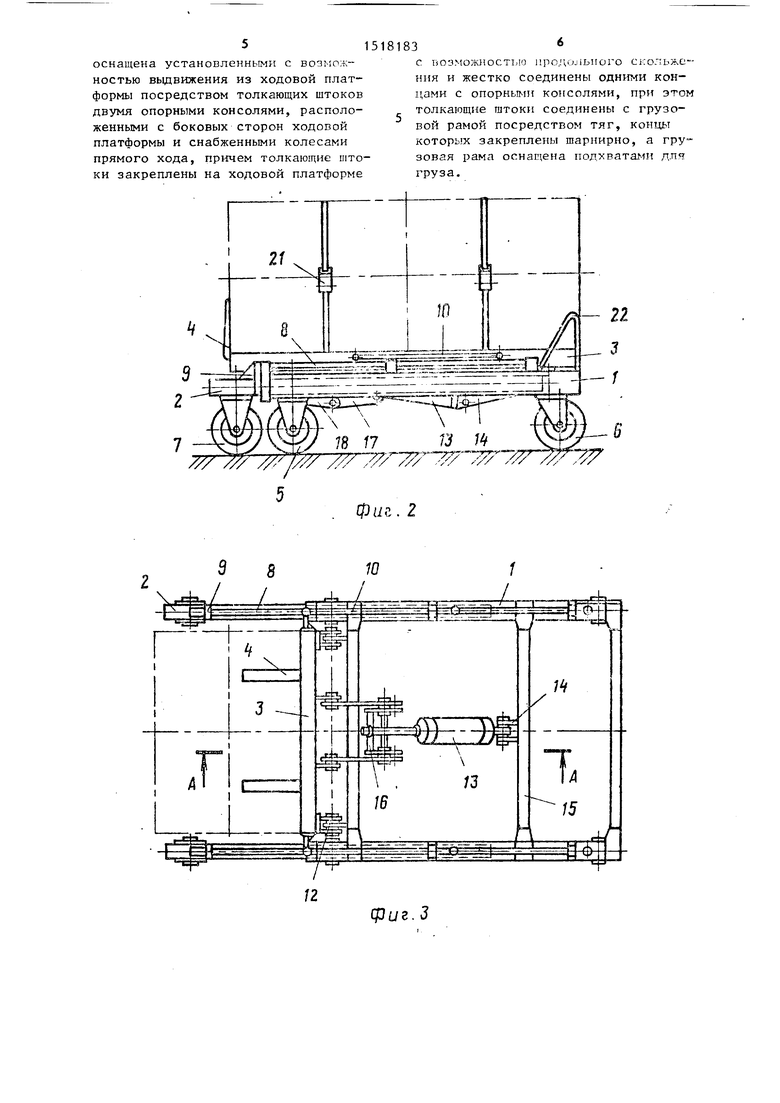

Изобретение относится к средствам напольного безрельсового транспорта для перемещения грузов внутри промышленных зданий. Цель изобретения - уменьшение габаритов и снижение трудоемкости погрузочно-разгрузочных работ. Ручная тележка состоит из платформы 1 с выдвижными посредством толкающих штоков 8 опорными консолями 2. Грузовая рама 3 оборудована подхватами 4 и соединена с передней поперечной балкой платформы шарнирно. Толкающие штоки установлены на платформе с возможностью продольного скольжения и соединены с рамой 3 шарнирными тягами 10. 4 ил.
фаг. 2
. J
Y /// / ie
U2.f
Составитель Г.Гандыбин Редактор А.Долинич Техред Л.Олийнык Корректор И.Пожо
Заказ 6548/21
Тираж 480
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГК-НТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г, Ужгород, ул. Гагарина, 101
-/f
Подписное
| Ручная тележка | 1982 |
|
SU1071500A1 |
