Изобретение относится к транспортной робототехнике и предназначено для безлюдной транспортировки пакетированных грузов различного вида. В том числе, для перемещения по территории садов собранного в контейнеры и/или в пулинг-тару на поддонах урожая садовоплодной продукции, а также, для перемещения палетированных грузов на складах и в производственных помещениях.
Известны транспортные роботы в виде напольных безрельсовых грузонесущих автоматических тележек, представляющих собой совокупность манипулятора, перепрограммируемого устройства управления и ходового устройства – шасси робота или транспортной платформы, на которой агрегатирован робот.
Аналогами изобретению по назначению и по конструкции являются: изобретение «Мобильный робот» по патенту RU №2446937 C2;
изобретение «Транспортный робот с бортовой локационной системой» по патенту RU 2 454 314 C2;
изобретение «Транспортный робот» по патенту SU №1452738 A1;
изобретение «Транспортный робот» по патенту RU №2424891 C1 коллаборативный робот для наружного транспорта в промышленности RB-VOGUI (https://robosklep.com/en/mobile-robots/162-rb-vogui.html) и робот-паллетоперевозчик CA-BY1000 (https://nissa-eng.ru/stati/casun-ca-by1000-angstrem/; https://nissa-eng.ru/katalog/vendors/casun/compact-forklift-agv/#features).
Изобретение «Мобильный робот» по патенту RU №2446937 C2 представляет собой только высокоманевренную транспортную платформу без манипулятора и навигационной системы с вычислительным устройством и, тем самым, ограничено в применимости, поскольку не может автономно, без внешней системы управления и погрузочных систем перемещаться и загружать на платформу и сгружать с платформы никакие грузы. Маневрирование робота осуществляется регулированием соотношения скоростей вращения приводных валов ведущих колёс.
Транспортный робот по патенту RU №2454314 C2 представляет собой только оснащённую бортовой локационной системой транспортную платформу без манипуляторов для погрузки/разгрузки грузов на платформу. При этом, локационная система может быть использована только в специально подготовленном помещении или на площадке с маркерными маяками или со светоконтрастной разметкой покрытия опорной поверхности. Указанные недостатки обусловливают ограниченность применимости изобретения. Маневрирование робота осуществляется дополнительными электроприводами вертикальных стоек с колёсами.
Изобретение по патенту SU №1452738 A1 представляет собой транспортную платформу в виде рамы с шасси из установленных посредством вертикальных вращательных кинематических пар сдвоенных мотор-колес, оснащённую датчиками угла поворота сдвоенных мотор-колес относительно рамы и установленных парами грузовых платформ на стойках винт-гайка для вертикального перемещения платформ. Данная транспортная платформа ограничена в применимости вследствие необходимости дополнительного оснащения навигационной и позиционирующей системой и использования внешних погрузочно/разгрузочных устройств. Маневрирование осуществляется посредством использования дополнительных электроприводов, отклоняющих звенья рамы.
Разработанный Технологическим центром Eurecat и компанией Robotnik Automation транспортный робот RB-VOGUI представляет собой шестиколёсный экипаж с подвеской Rocker-Bogie и с кузовом для аппаратуры устройства управления и отсеком для транспортируемого груза. Изготовители представляют его как высокомодульный, автономный коллаборативный наземный робот для автономной транспортировки материалов в промышленном и строительном секторах. Предполагается, что подвеска Rocker-Bogie обеспечивает роботу высокую проходимость на местности с неровным рельефом и большим разнообразием статических и динамических препятствий, а также передовую систему взаимодействия с человеком. Существенными недостатками данного робота являются маневрирование в режиме «бортового поворота» с соответствующими межосевыми и межколёсными кинематическими несоответствиями, свойственные всем многоколёсным шасси значительные коэффициенты перераспределения и концентрации нагрузок при движении на уклонах, а также необходимость использования внешних погрузочно/разгрузочных агрегатов.
Кроме указанных недостатков, представленные аналоги сложны конструктивно, управление их перемещением связано с преодолением кинематического несоответствия между колёсами и в системе местность-машина при движении в поворотах и/или по неровной опорной поверхности, вследствие чего такие транспортные платформы обладают низкими управляемостью и наблюдаемостью управления.
Наиболее близким аналогом изобретения является робот-палетоперевозчик CA-BY1000, представляющий собой оснащённый навигационной и позиционирующими устройствами самоходный автономный вилочный подъёмник для безлюдной транспортировки паллетированных грузов. Существенным недостатком данного изобретения является использование подвильных роликов в качестве опорных колёс, вследствие чего робот-паллетоперевозчик может передвигаться только по ровной плоской поверхности с твёрдым покрытием. Маневрирование робота осуществляется регулированием соотношения скоростей вращения ведущих колёс.
Таким образом, известные транспортные роботы обладают низкой применимостью из-за того, что они не могут выполнять транспортные операции с погрузкой/разгрузкой в безлюдном режиме, конструктивно сложны и обладают низкой мобильностью в виде способности перемещаться только по плоской твёрдой поверхности.
Задачей изобретения является создание применимого и конструктивно простого высокомобильного транспортного робота для безлюдного перемещения палетированных грузов.
Задача изобретения решается тем, что транспортный робот для безлюдного перемещения палетированных грузов в виде самоходной напольной безрельсовой грузонесущей автоматической тележки, представляющей собой совокупность манипулятора, перепрограммируемого электронного устройства управления роботом и ходового устройства, оснащённой навигационной и позиционирующими системами и сенсорной и видеосистемами, изготавливают в виде самоходного статически уравновешенного двухколейного двухколёсного агрегата с вилочным подъёмником, установленным на горизонтальной П-образной несущей раме с возможностью управляемого перемещения рамы относительно несущих колёсных стоек с установленными на них маршевыми колёсами, а на электронное устройство управления роботом устанавливают программное обеспечение с системой распознавания видеопотока от видеосистемы и сенсорной системы и восстановления геометрического образа места проведения работ.
Внешний вид транспортного робота с яблочным контейнером на вилах представлен на Фиг 1. На нём схематически изображены: 1 – колёса робота; 2 – рама с несущими направляющими балками; 3 - вилы; 4 – кузов с агрегатами и аккумуляторными батареями; 5 - стойки колёсные несущие; 6 – крыло колёсное; 7 – блок с сенсорными приборами и светосигнальной аппаратурой; 8 – яблочный контейнер.
Колёса 1 робота представляют собой приведённые от мотор-колёс оснащённые пневматической или сплошной эластичной шиной спицованные или на сплошном диске колёса большого диаметра. Мотор-колёса могут быть прямого привода или редукторные. Питание на мотор-колёса подают от аккумуляторов, размещённых в кузове 4 вместе с электронным устройством управления и навигационным оборудованием, приводом подъёмника вил и приводом устройства перемещения рамы относительно колёс. Несущие колёсные стойки 5 каждая представляют собой несущий корпус с размещённым в нём узлом крепления мотор-колёса, окном для проходящей сквозь стойку несущей направляющей балки рамы и опорными верхними и нижними роликами или подшипниками. Блок 7 с сенсорными приборами и светосигнальной аппаратурой включает стандартный комплект дистанционных датчиков расстояний, лидар, видеосистему и светодиодные сигнальные и осветительные приборы.
Маневрирование робота осуществляется посредством управления соотношением скоростей вращения маршевых колёс. В отличие от роботов на многоосных/многоколёсных шасси, у робота на двухколейном двухколёсном шасси в конструкции робота отсутствуют избыточные связи и при маневрировании робота не возникают вызванные избыточными связями осевые нагрузки на колёсах. Вследствие этого, движение робота происходит в режиме практически полного кинематического соответствия и, соответственно, с высокой управляемостью и высокой наблюдаемостью управления.
Массогабаритные характеристики транспортного робота выбирают в соответствии с видом и массогабаритными характеристиками грузов, подлежащих транспортировке данным роботом. В частности, на схемах к описанию изобретения указаны размеры транспортного робота для безлюдного перемещения стандартных яблочных контейнеров с урожаем садовоплодной продукции.
Навигационную и позиционирующую системы робота используют стандартные из множества применяемых в робототехнике систем и не являются объектом данного изобретения.
Система распознавания изображений в видеопотоке от видеосистем и восстановления геометрического образа места работ по данным системы распознавания и датчиков сенсорной системы может быть выполнена различными известными способами и не является объектом данного изобретения.
Вилочный подъёмник робота используют серийно изготавливаемый. Его выбирают по технико-эксплуатационным характеристикам из множества представленных производителями соответственно предназначению робота и условиям его эксплуатации.
Привод устройства перемещения рамы относительно колёс может быть выполнен множеством различных известных способов. В том числе, в виде пары соединяющих несущие стойки и несущие балки рамы цепей или зубчатых ремней, приведённых от размещённого в агрегатном блоке моторредуктора.
Мотор-колёса привода маршевых колёс выбираются из серийно изготавливаемых изделий соответственно массогабаритным характеристикам робота и условиям передвижения соответственно предназначению робота. Например, такой выбор осуществляется по результатам оценки величины сопротивления качению колёс нагруженного робота при перемещении по грунту в месте проведения роботом транспортных работ. Подобные расчёты являются стандартными и не рассматриваются в данном изобретении.
Узел сопряжения несущих колёсных стоек с несущими балками рамы может быть выполнен различными способами. В том числе, в виде опирающейся на установленные в стойке опорные ролики/подшипники несущей балки рамы, проходящей через тоннель в стойке. Конкретное конструктивное решение привода рамы является объектом отдельного изобретения.
Работает транспортный робот следующим образом:
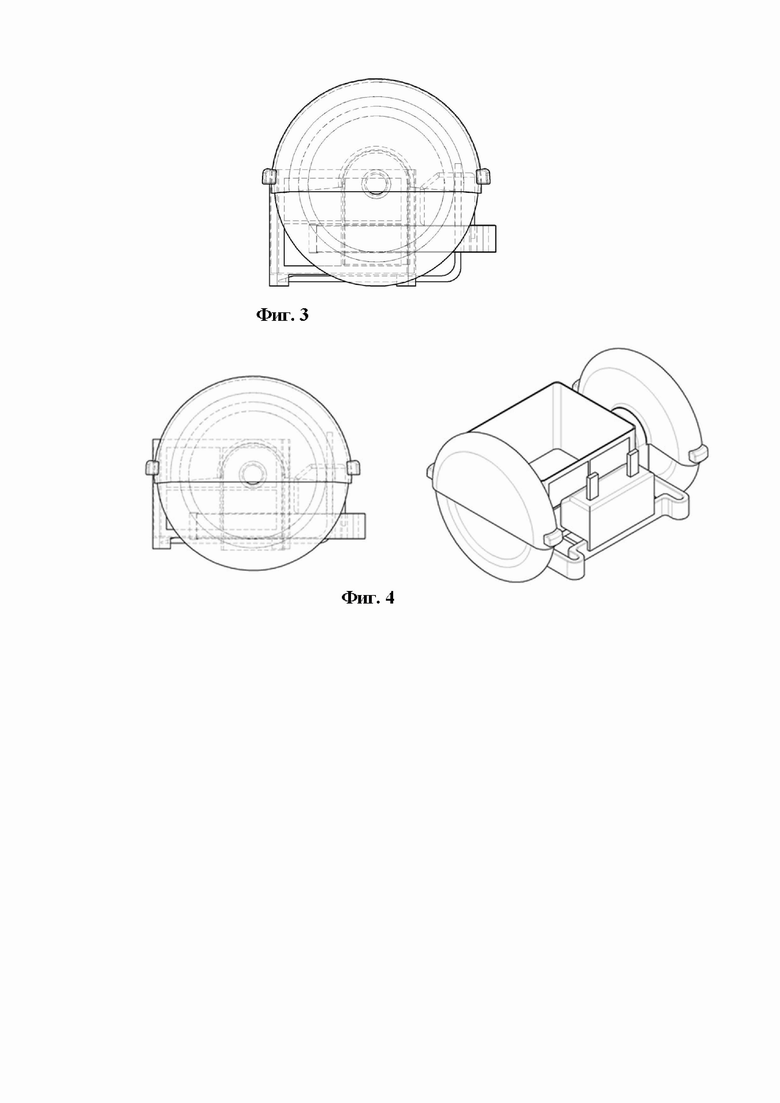
Робот с заряженными аккумуляторными батареями и установленным в электронном устройстве управления роботом программным обеспечением с системой распознавания изображений видеопотока от видеосистемы и восстановления геометрического образа рабочего пространства по данным системы распознавания видеопотока и данных сенсорной системы и загруженной электронной картой участка проведения транспортных работ с палетированными грузами доставляют к месту работ, проводят тестирование оборудования робота и его позиционирование на участке работ, загружают в устройство управления миссию и подают команду на выполнение транспортных операций согласно миссии. Система распознавания и восстановления геометрического образа места работ осуществляет распознавание ситуации по видеопотоку и данным сенсорных датчиков и вырабатывает команды на приводы маршевых колёс, вилочного подъёмника и механизма перемещения рамы, приводящие к выполнению миссии в виде выполнения операций с грузами, расположенными в исходных точках на участке работ. Для этого робот перемещается к распознанному грузу на палете, опускает вилы подъёмника, заводит их в палету своим перемещением относительно палеты (Фиг 2. и Фиг 3.), поднимает вилы с палетой с размещённым на ней грузом, перемещает несущую раму с поднятой на вилах палетой относительно колёс для приведения рамы в горизонтальное положение (Фиг 4.) и перемещается к обозначенному в миссии месту доставки груза. Достигнув конечной точки маршрута согласно миссии, робот опускает вилы и устанавливает палету с грузом в указанной в миссии точке, отъезжает от палеты с одновременным восстановлением горизонтального положения рамы и начинает движение к следующей распознанной палете с грузом. Большой диаметр маршевых колёс обусловливает низкое сопротивление качению колёс по неподготовленной местности, а двухколейная двухколёсная компоновка обусловливает отсутствие избыточных связей в конструкции ходовой части робота, движение без кинематического несоответствия и высокие проходимость, маневренность, управляемость и наблюдаемость управления, обусловливающие, в свою очередь, обеспечение полной управляемости робота во всевозможных дорожных ситуациях и, тем самым, высокую мобильность и эффективность применения робота.
Применение высокомобильного транспортного робота позволит существенно сократить потребность в людском персонале при выполнении рутинных трудоёмких транспортных операций в производстве садовоплодной продукции в полевых условиях и овощной продукции в закрытом грунте, а также в складах и в производственных цехах. Особенно полезным новый робот окажется при проведении транспортных операций во вредных или опасных для людей условиях. Высокая проходимость двухколейного двухколёсного шасси робота обусловливает способность робота перемещаться по неподготовленной местности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мультиагентный робототехнический поисково-спасательный комплекс | 2021 |
|
RU2773987C1 |
| Робототехнический комплекс для обеспечения общественной безопасности | 2020 |
|
RU2757747C1 |
| Робот-доставщик на одноосном шасси | 2021 |
|
RU2810208C2 |
| Высокоподвижный исследовательский планетоход | 2022 |
|
RU2780069C1 |
| Робототехнический комплекс для безлюдного возведения строений/укрытий на Луне | 2020 |
|
RU2751836C1 |
| Мобильный робот-помощник | 2021 |
|
RU2810399C2 |
| Сельскохозяйственный робот-комбайн | 2019 |
|
RU2728225C1 |
| Агрегат для перемещения лежачих больных - больничный робот | 2018 |
|
RU2724824C2 |
| Программно-аппаратный комплекс для управления автономным мобильным роботом-погрузчиком | 2024 |
|
RU2825022C1 |
| Способ создания и приведения в рабочее положение раскладной рамы устройства и варианты устройств с платформой, со съёмными подвижными и неподвижными опорами, на основе данного способа | 2024 |
|
RU2837095C1 |

Изобретение относится к транспортной робототехнике и предназначено для безлюдной транспортировки пакетированных грузов различного вида, в том числе для перемещения по территории садов собранного в контейнеры и/или в пулинг-тару на поддонах урожая садовоплодной продукции, а также для перемещения палетированных грузов на складах и в производственных помещениях. Транспортный робот представляет собой самоходную напольную безрельсовую грузонесущую автоматическую тележку, имеет вид статически уравновешенного двухколейного двухколёсного агрегата с вилочным подъёмником, установленным на горизонтальной П-образной несущей раме с возможностью управляемого перемещения рамы относительно несущих колёсных стоек с установленными на них маршевыми колёсами. Робот содержит электронное устройство управления роботом с программным обеспечением с системой распознавания видеопотока от видеосистемы и сенсорной системы и восстановления геометрического образа места проведения работ. Обеспечивается сокращение потребности в персонале при выполнении рутинных трудоёмких транспортных операций и высокая проходимость робота. 2 з.п. ф-лы, 4 ил.
1. Транспортный робот для безлюдного перемещения палетированных грузов в виде самоходной напольной безрельсовой грузонесущей автоматической тележки, представляющей собой совокупность манипулятора, перепрограммируемого электронного устройства управления роботом и ходового устройства и оснащённой навигационной и позиционирующими системами и сенсорной и видеосистемами, отличающийся тем, что робот представляет собой самоходный статически уравновешенный двухколейный двухколёсный агрегат с вилочным подъёмником, установленным на горизонтальной П-образной несущей раме с возможностью управляемого перемещения рамы относительно несущих колёсных стоек с установленными на них маршевыми колёсами, а на электронном устройстве управления роботом установлено программное обеспечение с системой распознавания видеопотока от видеосистемы и сенсорной системы и восстановления геометрического образа места проведения работ.
2. Транспортный робот по п. 1, отличающийся тем, что маршевые колёса робота приведены редукторными мотор-колёсами.
3. Транспортный робот по п. 1 или 2, отличающийся тем, что привод устройства перемещения рамы выполнен с зубчатыми ремнями или цепями, приведёнными от размещённого в агрегатном блоке мотор-редуктора и соединяющими несущие стойки робота с несущими балками рамы.
| УСТРОЙСТВО ДЛЯ ИЗБИРАТЕЛЬНОГО ВЫЗОВА ТЕЛЕФОННЫХ АППАРАТОВ | 1922 |
|
SU1000A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Мультиагентный робототехнический поисково-спасательный комплекс | 2021 |
|
RU2773987C1 |
| ПОДЪЕМНО-ТРАНСПОРТИРУЮЩЕЕ УСТРОЙСТВО | 0 |
|
SU205685A1 |
| ТРАНСПОРТНЫЙ РОБОТ С БОРТОВОЙ ЛОКАЦИОННОЙ СИСТЕМОЙ (ВАРИАНТЫ) | 2010 |
|
RU2454314C2 |
| Сельскохозяйственный робот-комбайн | 2019 |
|
RU2728225C1 |
| WO 2011031490 A2, 17.03.2011. | |||
