ел
х со (;о
00
Изобретение относится к ппд1)емно- транспортному оборудованию, а именно к подъемникам, и может быть использовано в различных отраслях длл подъема грузов.
Цель изобретения - снижение материалоёмкости и повышение надежности работы подъемника,
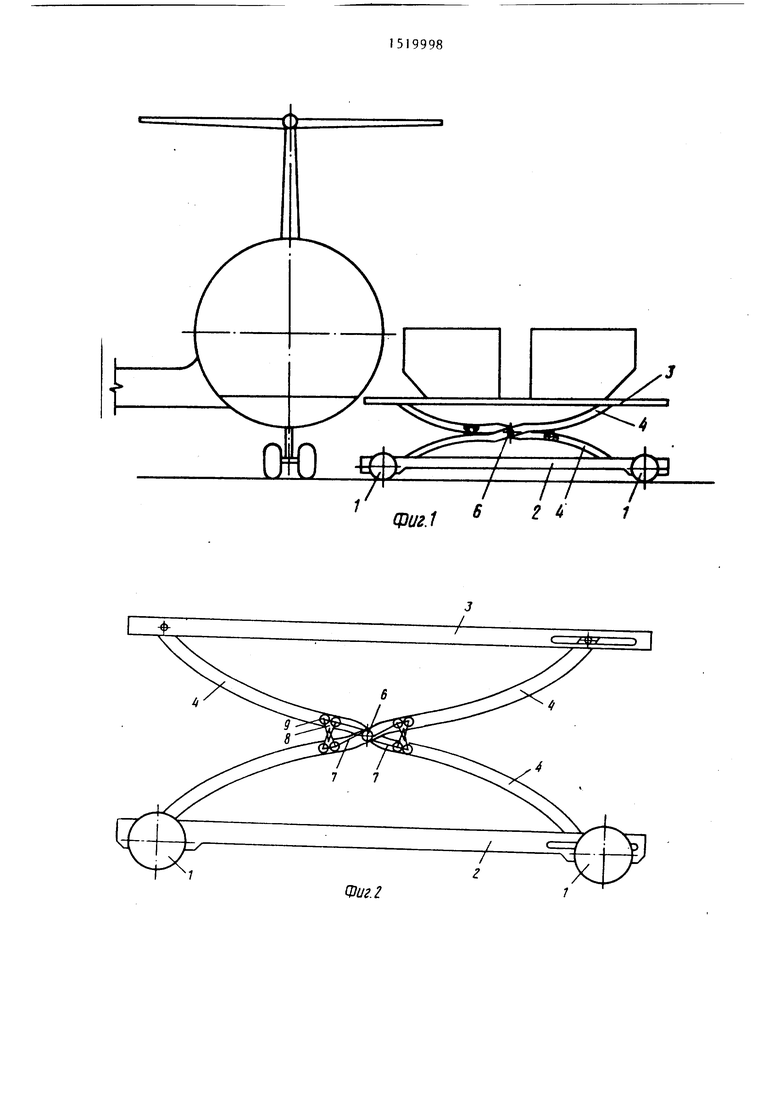
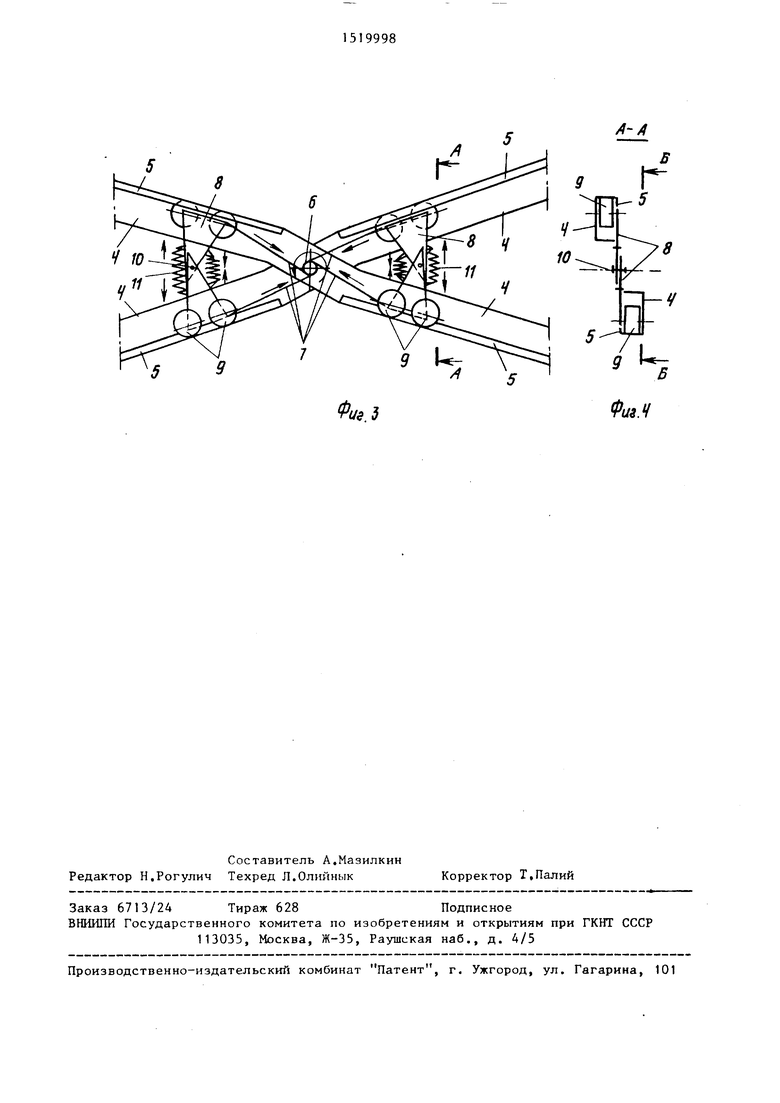
На фиг,1 изображен подъемник, об- щий вид; на фиг,2 - то же, вид сбоку; на фиг.З - место пересечения рычагов и положение в них тележек, рабочее положение, вид сбоку; на фиг.А - сечение А-А на фиг,3; на фиг.З - се- ченне Б-Б на фиг.А.
Подъемник содержит основание с ходовыми колесами 1, на несущей раме 2 которого смонтирована подъемная платформа 3 на ножничном механизме с криволинейными рычагами 4, выполненными, например, из повернутых друг к другу своими полками швеллеров, имею- DjHX в зависимости от своего место- нахождения друг относительно друга ограничительные бортики 5, Привод поворота рычагов включает ведущий барабан (вал) 6, установленный на осн, соединяющей рычаги 4, н попарно связанные гибким звеном (тросами) 7 тележ- ки 8, смонтированные с возможностью перемеп1ения в, рычагах 4 с обоих концов. Тележки 8, связанные с ходовыми роликами 9, соединены друг с другом шарниром 10 с возможностью поворота вокруг него и оборудованы упругими элементами 1 1 ,,
Подъемник работает следующим образом.
В исходном положении попарно связанные тележки 8 находятся в концах криволинейных рычагов 4. Для подъема платформа 3 с грузом (контейнерам включают привод и вал 6 приводится во вращение Гибкое звено 7, попар- но накручиваясь на вал 6, притягивае к нему тележки 8, которые,перемещаяс на роликах 9 по рычагам 4, раздвигают их, тем сам1,1м осуществляя подъе платформы 3. При зтом внутренний упругий элемент 11 сжимается, а внешний растягивается за счет изменения положения тележек В, так как угол меду смежными р1,гчагами 4 в процессе подъема изменяется. Для опускания платформы 3 опускают тормоз привода и тележки 8 за счет потенциальной энергии упругих элементов 11, откатываются обратно к концам рычагов 4,
Q 5
0 5 Q
д 5
0
50
5
На разных зтапах перемещения тележек, на которые воздействуют нагрузки, скорость подъема платформы 3 и величина возникающих при зтом нагрузок 01 концов рычагов 4 к оси их связывающей измеряется. Для того, чтобы более равномерно распределить нагрузки и усреднить скорость подъема платформы 3, рычаги 4 выполнены криволинейные S-образными, при этом их концевые участки имеют меньший радиус, а далее - более пологие, т.е. радиус кривизны рычагов 4 увеличивается от их концов к оси.
Кроме того, наличие на концах рычагов 4 участков с малым радиусом кривизны позволяет в исходном положении без помех убирать туда тележки 8 и, таким образом, достиг- ну 1 ь минимальной высоты платформы 3 над поверхностью земли при пропедении загрузочных работ.
Формула изобретения
1.Подъемник, содержащий основание, шарнирно связанное рычажным механизмом типа нюрнбергские ножницы с подъемной платформой, привод относительного поворота смежных рычагов, выполненный в виде гибкого звена, связанного с ходовыми роликами, перекатывающимися по направляющим боковых внутренних поверхностей рычагов, коренной конец гибкого звена закреплен на ведущем барабане, связанном с валом двигателя, отличающийся тем, что, с целью снижения материалоемкости и повьш1ения надежности работы подъемника, на каждой указанной поверхности рычагов расположены как минимум два установленных.последовательно друг за другом ролика, смонтированных на тележке, тележки, расположенные по одну сторону смежных рычагов, подпружинены между собой упругими элементами и щарнирно связаны с возможностью относительного поворота в плоскости поворота рычагов, каждая тележка порознь связана с одним из ходовых концов гибкого звена, коренные концы которых связаны с ведущим барабаном, шарнирно смонтированным на оси центрального шарнира нюрнбергских ножниц.
2.Подъемник по п 1, о т л и ч а- ю щ и и с я тем, что рычаги выполнены 8-с)бразной формы.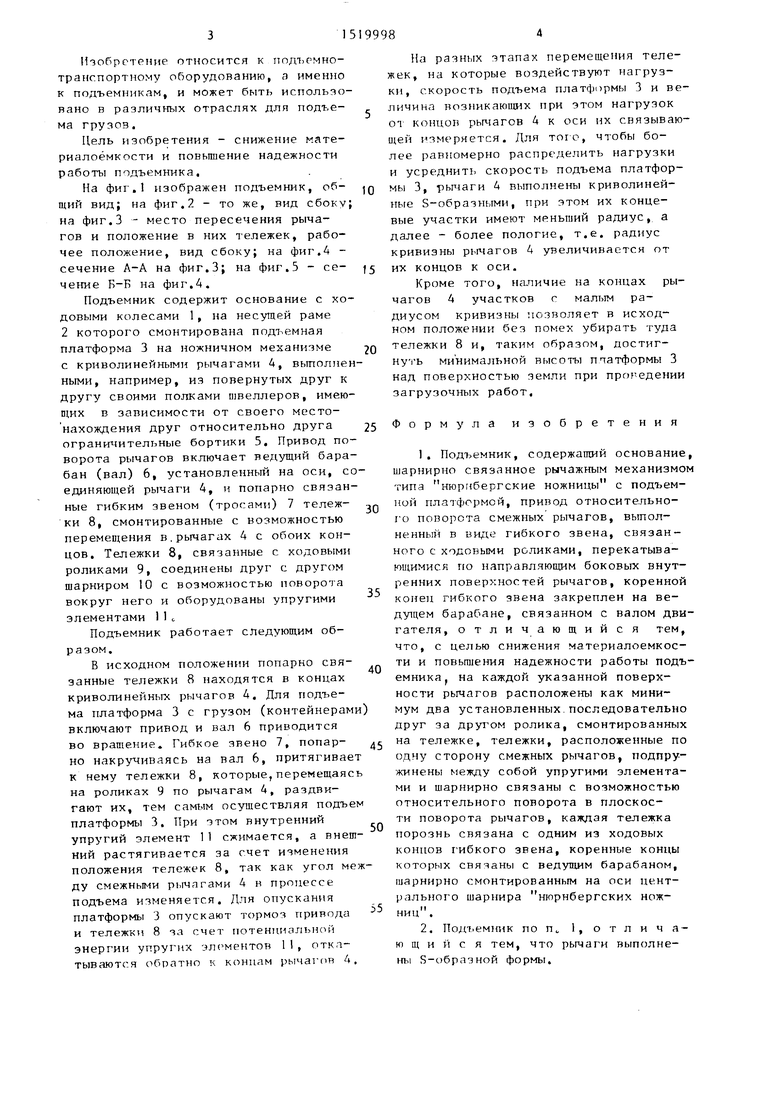
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемник | 1988 |
|
SU1650569A1 |
| ПОДЪЕМНИК | 2003 |
|
RU2258665C2 |
| Подъемник | 1988 |
|
SU1586994A1 |
| Подъемная платформа | 1990 |
|
SU1730023A1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2006 |
|
RU2326047C1 |
| Подъемно-транспортное устройство | 1980 |
|
SU1020367A1 |
| Подъемник | 1990 |
|
SU1801941A1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2385284C1 |
| УСТРОЙСТВО ДЛЯ ОКРАСКИ КРУПНОГАБАРИТНЫХ ИЗДЕЛИЙ | 2008 |
|
RU2388550C1 |
| Автоматизированный склад | 1978 |
|
SU710874A1 |
Изобретение относится к подъемно-транспортному оборудованию, а именно к подъемникам, и может быть использовано в различных отраслях для подъема грузов. Цель изобретения - снижение материалоемкости и повышение надежности работы подъемника. Подъемник содержит основание с ходовыми колесами, на несущей раме которого смонтированы подъемная платформа, рычажный механизм типа "нюрнбергские ножницы" с рычагами 4 и привод поворота рычагов, включающий в себя ведущий барабан 6, установленный на оси, соединяющей рычаги 4, и попарно связанные гибким звеном 7 тележки 8, смонтированные с возможностью перемещения в рычагах 4 с обоих концов. Тележки 8, связанные с ходовыми роликами 9, соединены друг с другом шарниром 10 с возможностью поворота вокруг него и оборудованы упругими элементами 11. 2 с.п. ф-лы, 5 ил.
Фиг. 2
/l
UФиз.
| Патент США № 3785462, кл | |||
| Индукционная катушка | 1920 |
|
SU187A1 |
