фиг.2
Изобретение относится к оборудованию, предназначенному для подъема погрузчиков до уровня пола подвижного состава с целью выгрузки тарно-штучных грузов, и может быть использовано в различных отраслях народного хозяйства.
Цель изобретения - повышение надежности.
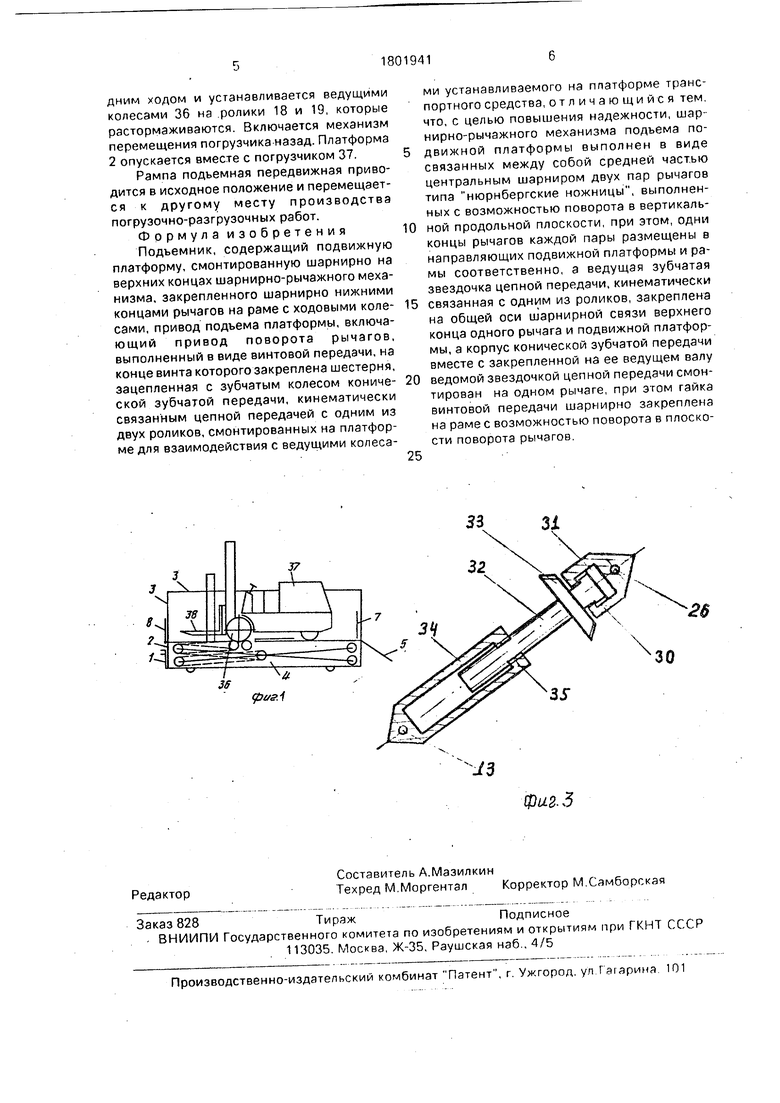
На фиг. 1 показан общий вид устройства; на фиг. 2 и 3 - то же, в рабочем положении,
Подъемник состоит из рамы с ходовыми колесами 1, подвижной платформы 2 с ограждениями 3.соединенной шарнирно-ры- чажным механизмом 4, поворотного трапа 5, поворотных защелок 6 для фиксации подъемника на рельсовом пути, поворотного упора 7 и поворотного козырька 8 (фиг. 1,
2).
Шарнирно-рычажный механизм 4 состоит из пары перекрещивающихся, соединенных осью 9, рычагов 10 и 11 (фиг, 2). Верхний конец рычага 11 и нижний конец рычага 10 соединены, соответственно, с платформой 2 и колесной рамой 1 осями 12 и 13. Верхний конец рычага 10 и нижний конец рычага 11 подвижно установлены катками 14 и 15 в горизонтальных направляющих 16 и 17 соответственно платформы 2 и рамы 1.
На платформе 2 установлены горизонтально параллельные и отстоящие друг от друга ролики 18 и 19 с осями 20 и 21, составляющие привод подъема платформы 2. На оси 20 жестко установлена звездочка 22, на оси 12 - звездочки 23 и 24. На верхней половине рычага 11 шарнирно расположена горизонтальная ось 25, на которой жестко установлена звездочка 26 и коническое зубчатое колесо 27 (фиг. 3). Звездочки 22 и 23, 24 и 26 соединены, соответственно, бесконечными цепями 28 и 29. На оси 25 шарнир- но закреплен корпус 30 с упорным подшипником 31, в котором установлен винт 32 с жестко насаженной конической шестерней 33, имеющей возможность взаимодействия с коническим колесом 27. На оси 13 шарнирно закреплен корпус 34 с гайкой 35 на конце. Винт 32 и гайка 35 смонтированы с возможностью взаимодействия друг с другом так, что образуется винтовая передача. Ручной тормоз роликов 18 и 19, например, заклинивающего действия, установлен на платформе 2 (на чертежах не показано).
Ролики 18 и 19 установлены с возможностью контактирования с ведущими колесами 36 погрузчика 37 с вилочным захватом 38.
Устройство работает следующим образом.
Подъемник перемещается вдоль грузового Фронта погрузчиком или крановым оборудованием и устанавливается рамой 1 непосредственно у дверного проема крытого вагона (на чертежах не показано). Поворотные защелки 6, например скобообразного вида, опускаются на ближайший рельс и фиксируются. В исходном положении (фиг. 1) подъемник находится в
сложенном состоянии, поворотный козырек 8- вертикально. Ролики 18 и 19 заторможены, упор 7 повернут и открывает доступ для въезда погрузчика 37, поворотный трап 5 установлен вертикально.
5 Водитель погрузчика 37 опускает поворотный трап 5, создавая наклонный въезд. Погрузчик 37 въезжает по поворотному трапу 5 на платформу 2 и устанавливается ведущими колесами 36 на ролики 18 и 19.,
0 установленные осями 20 и 21 на платформе 2, Водитель погрузчика 37 поворачивает упор 7, предотвращая самопроизвольный съезд погрузчика 37 с подъемника. Включается механизм перемещения погрузчика 37
5 вперед (не показано), ведущие колеса 36 начинают вращаться, воздействуют на ролики 18 и 19, вращая их и ось 20.
Посредством звездочек 22, 23, 24 и 26 . установленных соответственно на о сях 20,
0 12, 25, и бесконечных цепей 28 и 29 вращение передается горизонтальной оси 25. Вместе с горизонтальной осью 25 вращается коническое колесо 27 и от него - коническая шестерня 33, жестко посаженная на
5 винт 32, установленный на корпусе 30 с упорным подшипником 31. Далее вращение передается винту 32, который взаимодействует с гайкой 35 на конце корпуса 34, шарнирно установленного на оси 13. Винт 32
0. перемещается поступательно при вращении шестерни 33 и воздействует на рычаг 11. Рычаги 10 и 11 шарнирно-рычажного механизма 4 поворачиваются в осях 12, 13, 9, при этом их концы катками 14 и 15 в
5 горизонтальных направляющих 16 и 17 перемещаются влево, верхние концы рычагов 10 и 11 поднимаются и последовательно параллельно поднимают вверх платформу 2 с ограждениями 3 до уровня пола вагона. Ве0 дущие колеса 36погрузчика 37 останавливаются. Водитель погрузчика 37 тормозит ролики 18 и 19 ручным тормозом, например заклинивающего действия (на чертежах не показано), Погрузчик 37 движется к дверно5 му проему вагона, воздействует вилочным захватом 38 на поворотный козырек 8 до упора его в пол вагона и въезжает в вагон (не показано).
После окончания погрузки (разгрузки) вагона погрузчик 37 подается из вагона задним ходом и устанавливается ведущими колесами 36 на .ролики 18 и 19, которые растормаживаются. Включается механизм перемещения погрузчика назад. Платформа 2 опускается вместе с погрузчиком 37.
Рампа подъемная передвижная приводится в исходное положение и перемещается к другому месту производства погрузочно-разгрузочных работ. Формула изобретения Подъемник, содержащий подвижную платформу, смонтированную шарнирно на верхних концах шарнирно-рычажного механизма, закрепленного шарнирно нижними концами рычагов на раме с ходовыми колесами, привод подъема платформы, включающий привод поворота рычагов, выполненный в виде винтовой передачи, на конце винта которого закреплена шестерня, зацепленная с зубчатым колесом конической зубчатой передачи, кинематически связанным цепной передачей с одним из двух роликов, смонтированных на платформе для взаимодействия с ведущими колеса0
5
0
5
ми устанавливаемого на платформе транспортного средства, отличающийся тем, что, с целью повышения надежности, шарнирно-рычажного механизма подъема подвижной платформы выполнен в виде связанных между собой средней частью центральным шарниром двух пар рычагов типа нюрнбергские ножницы, выполненных с возможностью поворота в вертикальной продольной плоскости, при этом, одни концы рычагов каждой пары размещены е направляющих подвижной платформы и рамы соответственно, а ведущая зубчатая звездочка цепной передачи, кинематически связанная с одним из роликов, закреплена на общей оси шарнирной связи верхнего конца одного рычага и подвижной платформы, а корпус конической зубчатой передачи вместе с закрепленной на ее ведущем валу ведомой звездочкой цепной передачи смонтирован на одном рычаге, при этом гайка винтовой передачи шарнирно закреплена на раме с возможностью поворота в плоскости поворота рычагов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Поъемник | 1990 |
|
SU1791368A1 |
| ПРИЦЕП С ОТКИДНЫМИ БОРТАЛ\И И СЪЕЛ\НЫМИТРАПАМИ | 1966 |
|
SU180999A1 |
| Механический погрузчик | 1974 |
|
SU606795A1 |
| МАНЕВРОВОЕ УСТРОЙСТВО ДЛЯ ВАГОНОВ | 2009 |
|
RU2405697C1 |
| Складная эстакада для погрузки-разгрузки вагонов и фургонов | 2018 |
|
RU2691485C1 |
| Авиатранспортируемый самовыгружающийся погрузчик паллет и контейнеров | 2017 |
|
RU2660198C1 |
| Подъемная платформа | 1990 |
|
SU1730023A1 |
| Телескопический ленточный конвейер | 1976 |
|
SU745796A1 |
| ЛЕСТНИЧНЫЙ ПОДЪЕМНИК | 2019 |
|
RU2703812C1 |
| Транспортное средство,приводимое в действие мускульной силой человека | 1986 |
|
SU1371940A1 |
Использование: для подъема погрузчиков до уровня пола подвижного состава с целью выгрузки товарно-штучного груза, и может быть использовано в различных отраслях народного хозяйства. Сущность изобретения: подъемник содержит раму с ходовыми колесами 1 и подъемную платформу 2. шарнирно смонтированную на верхних концах шарнирно-рычажного механизма 4. Шарнирно-рычажный механизм 4 нижними концами рычагов 10 и 11 шарнирно закреплен на раме с ходовыми колесами 1. Верхний конец рычага 10 и нижний конец рычага 11 соединены подвижно катками 14 и 15 соответственно в направляющих 16 и 17 подвижной платформы 2 и рамы 1 осями 12 и 13. Привод платформы 3 образован по крайней мере, двумя роликами 18 и 19, расположенными на подъемной платформе 2 и на которые установлены ведущие колеса 36 погрузчика, причем один из роликов 18 кинематически связан с горизонтальной осью 25, шарнирно расположенной на верхней половине одного из перекрещивающих рычагов 11 и кинематически связанной с винтовой передачей, корпус 34 которой шарнирно закреплен на колесной раме. 3 ил. ел
| СПОСОБ ВЫРАБОТКИ КОНСЕРВОВ "МЯСО ЖАРЕНОЕ" | 2008 |
|
RU2358501C1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
