ворота последних содержит два ходовых винта б и 7 с резьбой различного шага, одни концы которых шарнирно связаны на основании 2 с приводом их вращения от двигателя 8, а другие - с втулками 9, шарнирно связанными стержнем 10 с осью 11 перекрещивающихся рычагов 4. Стержень 10 посредством ползуна 12 и поводков 13 с шарнирами на своих концах кинематически связан с перекрещивающимися рычагами 4, На ходовых винтах 6 и 7 смонтированы гайки 14 и 15 соответствующей резьбы, которые попарно соединены с первыми 16 и вторыми 17 рычагами с ходовыми роликами 18, смонтированными с возможностью перекатывания по направляющим 5, расположенным на внутренних боковых поверхностях смежных плеч перекрещивающихся рьГчагов 4. Длина вторых рычагов 17 превышает длину первых рычагов 16. Поводки 13 имеют одинаковую длину и ими совместно с перекрещивающимися рычагами 4 образован шарнирно-рычажный лараллелограмм- ный механиз. 7 ил.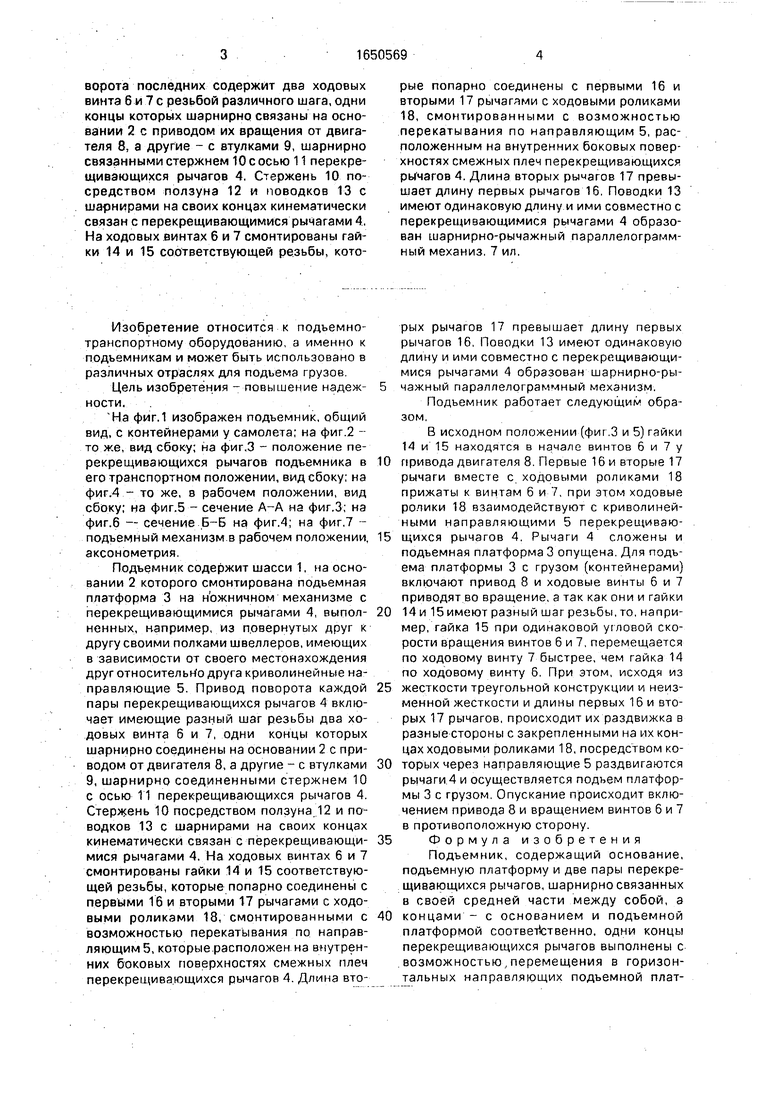
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2006 |
|
RU2326047C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2385284C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2006 |
|
RU2326048C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2006 |
|
RU2329943C1 |
| ПОДЪЕМНИК | 2003 |
|
RU2258665C2 |
| Устройство для подъема или перемещения тела с сохранением его изначального положения относительно горизонта или заданной поверхности | 2023 |
|
RU2814695C1 |
| Подъемник | 1990 |
|
SU1801941A1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2381985C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2009 |
|
RU2407695C1 |
| Грузоподъемный стол | 1986 |
|
SU1401006A1 |
Изобретение относится к подъемно- транспортному оборудованию, а именно к подъемникам, и может быть использовано в различных отраслях для подъема грузов Цель изобретения - повышение надежности Подъемник содержит основание 2 и подъемную платформу 3, смонтированную на двух парах перекрещивающихся рычагов 4 типа нюрнбергских ножниц Привод по3 ON СЛ
Изобретение относится к подъемно- транспортному оборудованию, а именно к подъемникам и может быть использовано в различных отраслях для подьема грузов
Цель изобретения - повышение надежности.
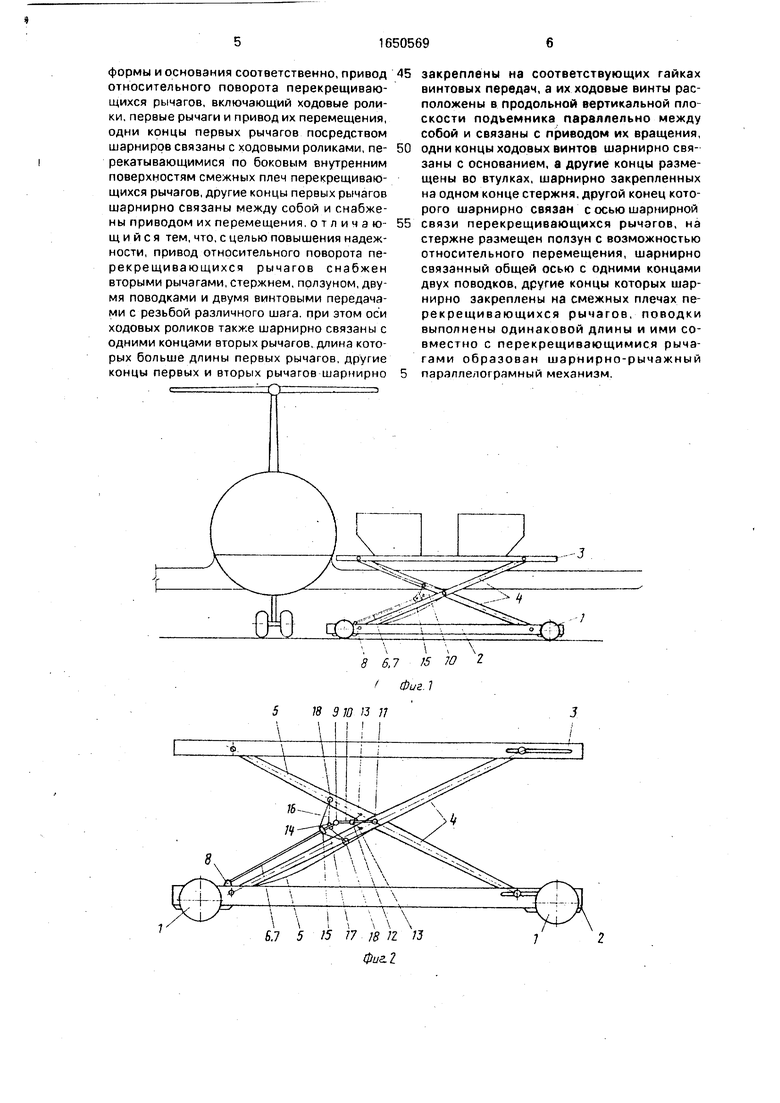
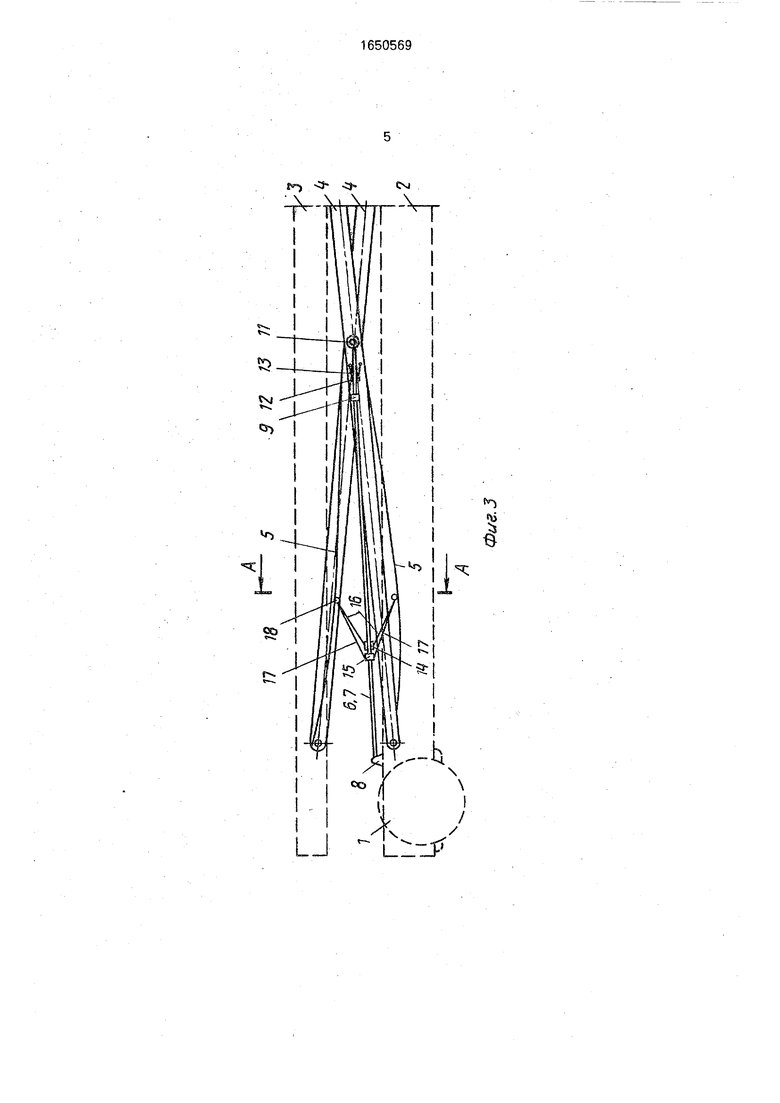
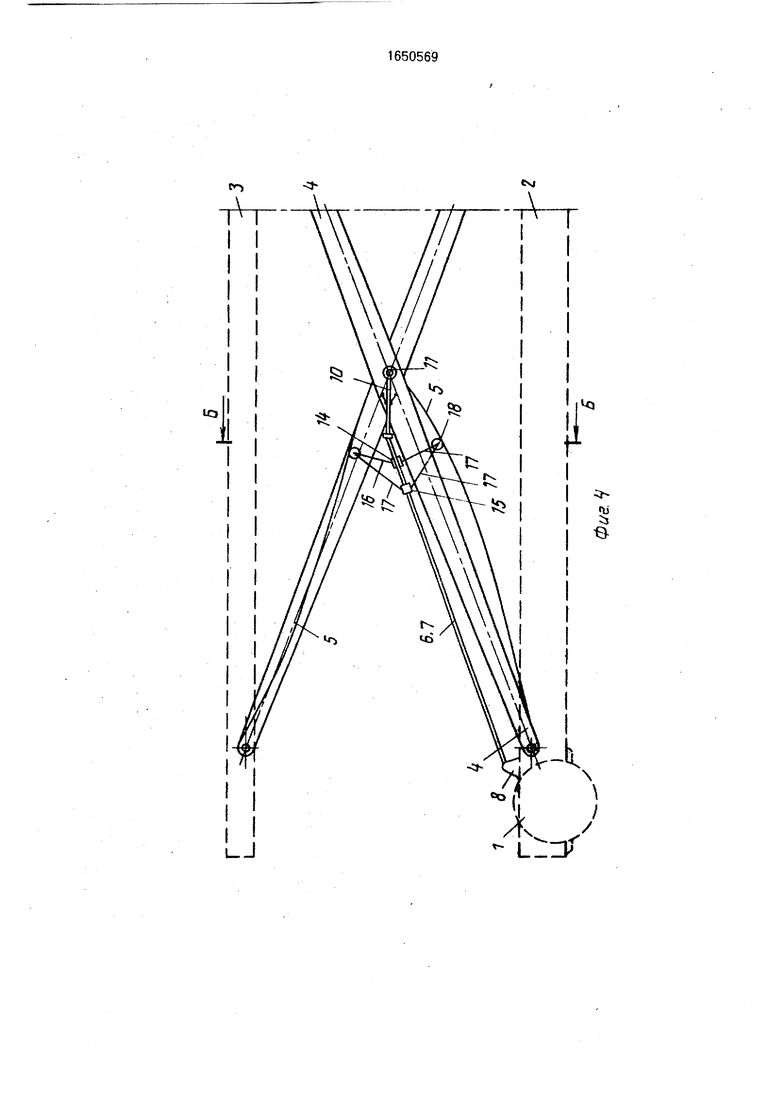
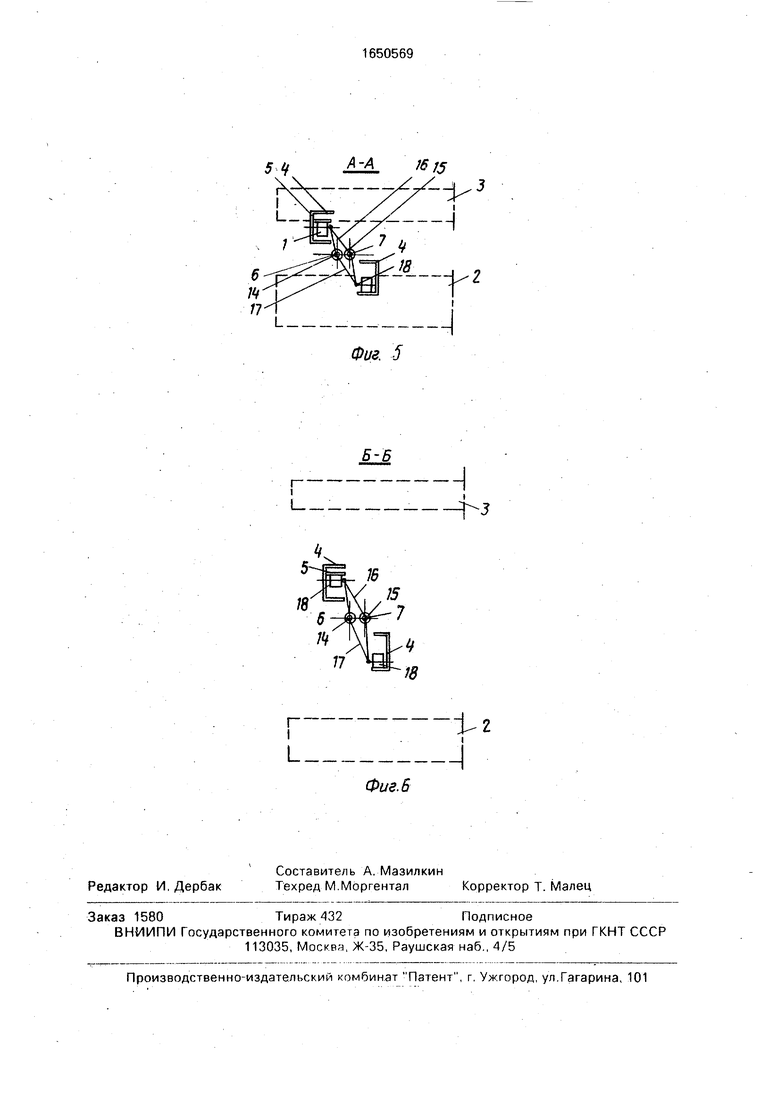
На фиг.1 изображен подъемник, общий вид, с контейнерами у самолета; на фиг.2 - то же, вид сбоку; на фиг.З - положение перекрещивающихся рычагов подъемника в его транспортном положении, вид сбоку; на фиг.4 - то же, в рабочем положении, вид сбоку; на фиг.5 - сечение А-А на фиг.З; на фиг.6 - сечение Б-Б на фиг.4; на фиг,7 - подъемный механизм в рабочем положении, аксонометрия.
Подъемник содержит шасси 1, на основании 2 которого смонтирована подъемная платформа 3 на ножничном механизме с перекрещивающимися рычагами 4, выполненных, например, из повернутых друг к другу своими полками швеллеров, имеющих в зависимости от своего местонахождения друг относительно друга криволинейные направляющие 5. Привод поворота каждой пары перекрещивающихся рычагов 4 включает имеющие разный шаг резьбы два ходовых винта 6 и 7, одни концы которых шарнирно соединены на основании 2 с приводом от двигателя 8, а другие - с втулками 9, шарнирно соединенными стержнем 10 с осью 11 перекрещивающихся рычагов 4. Стержень 10 посредством ползуна 12 и поводков 13 с шарнирами на своих концах кинематически связан с перекрещивающимися рычагами 4. На ходовых винтах 6 и 7 смонтированы гайки 14 и 15 соответствующей резьбы, которые попарно соединены с первыми 16 и вторыми 17 рычагами с ходовыми роликами 18, смонтированными с возможностью перекатывания по направляющим 5, которые расположен на внутренних боковых поверхностях смежных плеч перекрещивающихся рычагов 4. Длина вторых рычагов 17 превышает длину первых рычагов 16, Поводки 13 имеют одинаковую длину и ими совместно с перекрещивающимися рычагами 4 образован шарнирно-рычажный парэллелограммный механизм.
Подъемник работает следующим образом.
В исходном положении (фиг 3 и 5) гайки 14 и 15 находятся в начале винтов 6 и 7 у
привода двигателя 8. Первые 16 и вторые 17 рычаги вместе с ходовыми роликами 18 прижаты к винтам 6 и 7, при этом ходовые ролики 18 взаимодействуют с криволинейными направляющими 5 перекрещивающихся рычагов 4. Рычаги 4 сложены и подъемная платформа 3 опущена. Для подъема платформы 3 с грузом (контейнерами) включают привод 8 и ходовые винты 6 и 7 приводят во вращение, а так как они и гайки
14 и 15 имеют разный шаг резьбы, то, например, гайка 15 при одинаковой угловой скорости вращения винтов 6 и 7, перемещается по ходовому винту 7 быстрее, чем гайка 14 по ходовому винту 6. При этом, исходя из
жесткости треугольной конструкции и неизменной жесткости и длины первых 16 и вторых 17 рычагов, происходит их раздвижка в разные стороны с закрепленными на их концах ходовыми роликами 18, посредством которых через направляющие 5 раздвигаются рычаги 4 и осуществляется подъем платформы 3 с грузом. Опускание происходит включением привода 8 и вращением винтов 6 и 7 в противопопожную сторону.
Формула изобретения
Подъемник, содержащий основание, подъемную платформу и две пары перекрещивающихся рычагов, шарнирно связанных в своей средней части между собой, а
концами - с основанием и подъемной платформой соответственно, одни концы перекрещивающихся рычагов выполнены с возможностью,перемещения в горизонтальных направляющих подъемной платформы и основания соответственно, привод относительного поворота перекрещивающихся рычагов, включающий ходовые ролики, первые рычаги и привод их перемещения, одни концы первых рычагов посредством шарниров связаны с ходовыми роликами, пе- рекатывающимися по боковым внутренним поверхностям смежных плеч перекрещивающихся рычагов, другие концы первых рычагов щарнирно связаны между собой и снабжены приводом их перемещения, отличаю- щ и и с я тем, что, с целью повышения надежности, привод относительного поворота перекрещивающихся рычагов снабжен вторыми рычагами, стержнем, ползуном, двумя поводками и двумя винтовыми передачами с резьбой различного шага, при этом оси ходовых роликов также шарнирно связаны с одними концами вторых рычагов, длина которых больше длины первых рычагов, другие концы первых и вторых рычагов шарнирно
,
8 6,7 fS 70 2
I Фиг 1 18 910 а 11
Фиг. 1
закреплены на соответствующих гайках винтовых передач, а их ходовые винты расположены в продольной вертикальной плоскости подьемника параллельно между собой и связаны с приводом их вращения, одни концы ходовых винтов шарнирно связаны с основанием, а другие концы размещены во втулках, шарнирно закрепленных на одном конце стержня, другой конец которого шарнирно связан с осью шарнирной связи перекрещивающихся рычагов, на стержне размещен ползун с возможностью относительного перемещения, шарнирно связанный общей осью с одними концами двух поводков, другие концы которых шарнирно закреплены на смежных плечах перекрещивающихся рычагов, поводки выполнены одинаковой длины и ими совместно с перекрещивающимися рычагами образован шарнирно-рычажный параллелограмный механизм.
,
70 2
LJ -ui-jr
«
I
h
J
/
54
Б-Б
с:::: -Д,
16 О/ 15
17
Г
1
t-2
i
I Фиг. 6
| Подъемник | 1988 |
|
SU1519998A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
