Известны электрометрические вектормеры, состоящие из системы неподвижиых электродов, двух взаимно перпендикулярных жестко соединенных подвижных пластин, находящихся в электрическом поле, созданном системой неподвижных электродов и самой подвижной системой, а также отсчетного устройства. Значительный момент инерции, возникающий из-за особенностей подвески подвижной системы, затрудняет рег)лировку и уравновешивание ее, а также применение механической коррекции поля. Электрическая же коррекция поля изменением напряжения возбуждения, существующая в известных вектормерах, влияет на чувствительность их.
В предлагаемом электрометрическом вектормере, с целью уменьщения момента инерции подвижной системы и возможности применения механической коррекции ее нуля путем расположения растяжек вне )абаритов подвижной системы и обеспечеиия ей двух степеней свободы, подвижиая система прикреплена с помощью горизонтальных растяжек к рамке.
Рамка подвешена через растяжкодержатели к подвижному основанию, а каждая группа неподвижных электродов, на которые поданы напряжения возбуждения, сдвинутые по фазе на 90°, приклеена к внутренним сторонам крестообразной щели статора.
Для механической коррекции подвижной системы электрометрический вектормер снабжен механическим корректором и пpиcпocoблeниeм для закручивания второй пары растяжек за счет поворота подвижного основания вокруг цилиндрической расточки статора, чем и достигается установка подвижной системы на нуль по другой координате.
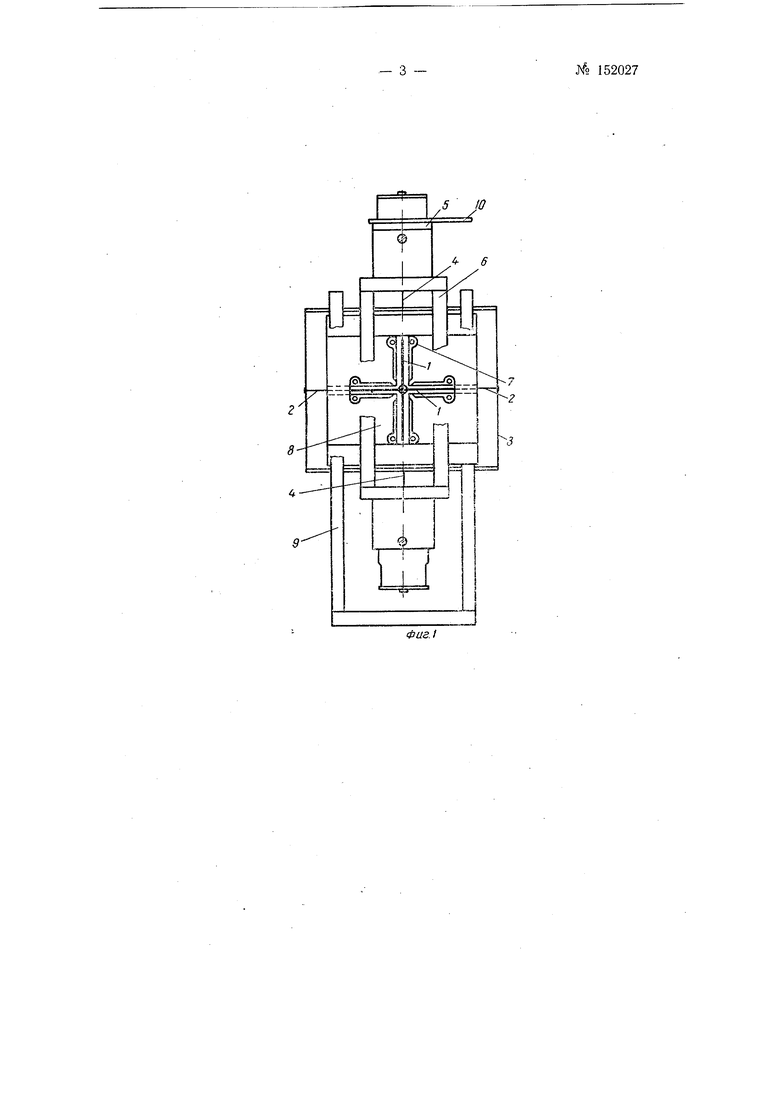
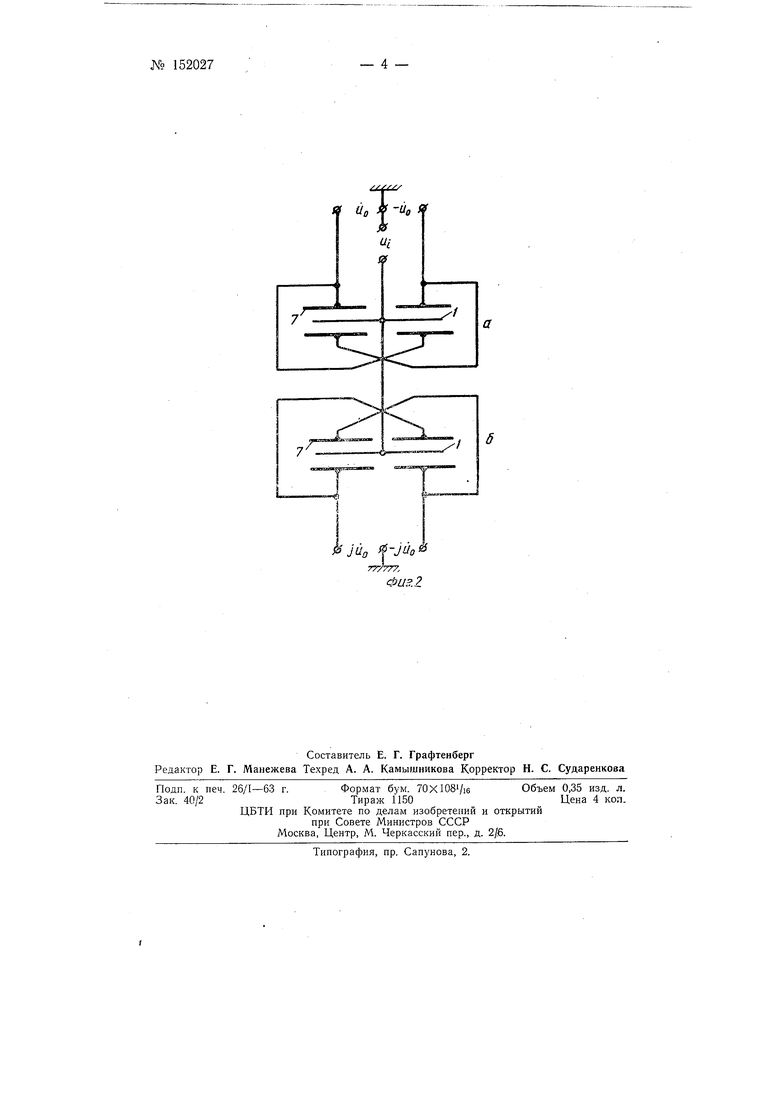
На фиг. 1 изображен предлагаемый вектормер; на фиг. 2, a и б- электрическая схема вектормера.
№ 152027
Подвижная система представляет собой две взаимно перпендикулярно скрепленные пластины 1, подвешенные на упругих растяжках 2 к легкой рамке 3. Рамка 3 также подвешена на растяжках 4 через растяжкодержатели 5 к подвил ;ному основанию 6. Две степени свободы подвижной системы обеспечиваются тем, что последняя может поворачиваться на растяжках как вокруг вертикальной, так и вокруг горизонтальной осей.
Неподвижная система образована двумя группами неподвижных электродов 7, приклеенных к внутренним сторонам крестообразной щели статора 8, жестко закрепленного в стойке 9.
Коррекция по одной координате отсчетного устройства осуществляется корректором 10, создающим крутящий момент на растяжках 4 по второй координате коррекция осуществляется поворотом подвижного основания 6 по цилиндрической расточке статора 8, что создает крутящий момент на растяжках 2.
При взаимодействии электрических полей, создаваемых измеряемым напряжением и напряжением t/o возбуждения одна из подвижных пластин 1 отклоняется от своего первоначального положения. При взаимодействии полей, создаваемых напряжением /Lo возбуждения, подаваемым на вторую пластину и сдвинутым по фазе на 90° относительно t/o и измеряемого напряжения (j происходит отклонение второй из подвижных пластин 1.
Отсчет модуля и фазы измеряемого радиуса-вектора производится по положению луча, отраженного от зеркала, которое укреплено на подвижной системе прибора. Благодаря взаимодействию электрических нолей подвижной и неподвижной систем модуль и фаза радиуса-вектора будут соответствовать модулю и фазе измеряемого напряжения.
Предмет изобретения
1.Электрометрический вектормер, состоящий из системы неподвижных электродов, двух взаимно перпендикулярных жестко соединенных подвижных пластин (подвижной системы), находящихся в электрическом поле, созданном системой неподвижных электродов и самой подвижной системой, а также отсчетного устройства, отличающийся тем, что, с целью уменьшения момента инерции подвижной системы и возможности применения механической коррекции ее нуля путем расположения растяжек вне габаритов подвижной системы и обеспечения ей двух степеней свободы, подвижная система прикреплена с помощью горизонтальных растяжек к рамке, рамка подвешена через растяжкодержатели к подвижному основанию, а каждая из групп неподвижных электродов, на которые поданы напрял ения возбуждения, сдвинутые по фазе на 90°, приклеена к внутренним сторонам крестообразной щели статора.
2.Электрометрический вектормер по п. 1, отл ич ающи.й ся тем, что, с целью механической коррекции подвижной системы, он снабжен механическим корректором для регулирования закручивающего момента пары растяжек и установки подвижной системы на нуль по одной координате и приспособлением для закручивания второй нары растяжек поворотом подвижного основания вокруг цилиндрической расточки статора для установки подвижной системы на нуль по другой координате.
m x j
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА | 2009 |
|
RU2423668C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА | 2002 |
|
RU2222780C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА | 2005 |
|
RU2301969C1 |
| МУЛЬТИСЕНСОР | 1996 |
|
RU2104559C1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2021 |
|
RU2758892C1 |
| КАМЕРТОННЫЙ МИКРОГИРОСКОП | 2014 |
|
RU2580871C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2001 |
|
RU2209394C2 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2009 |
|
RU2400708C1 |
| СПУТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2016 |
|
RU2627014C1 |
| Устройство для измерения индуктивных сопротивлений рассеяния обмотки статора электрической машины | 1981 |
|
SU1120256A1 |
jn
-«
2
8s
Jilo
777777,
