Изобретение относится к измерительной технике и может применяться в интегральных гироскопах вибрационного типа.
Известен чувствительный элемент микроэлектромеханического гироскопа, содержащий четыре подвижных массы, выполненные на пластине кремния [1]. Упругие подвесы подвижных масс расположены крестообразно и закреплены в точке пересечения на струне, вдоль которой действует измеряемая угловая скорость. Принудительные колебания подвижным массам задаются в плоскости пластины, причем направления движений осуществляются в попарно-противоположных направлениях. В результате колебаний механические напряжения в точке закрепления всегда равны нулю, что повышает добротность чувствительного элемента. Возникающие знакопеременные кориолисовы силы действуют на подвижные массы в направлении, перпендикулярном плоскости пластины.
Недостатком известного устройства является его низкая точность, обусловленная тем, что возбуждаемые колебания происходят в плоскости чувствительного элемента, а измерительные колебания перпендикулярно к этой плоскости, следовательно, трудно обеспечить условие резонансной настройки в обеих плоскостях колебаний, т.к. жесткости определяются разными технологическими факторами, а для многих материалов (например, кремний) и различными физическими свойствами.
Известен также чувствительный элемент микромеханического гироскопа, который содержит жесткую внешнюю рамку и центр, соединенный с неподвижным основанием и рамкой четырьмя несущими жесткими растяжками, расположенными крестообразно [2]. Между рамкой и центром на тридцати двух Г-образных подвесах подвешены четыре одинаковых подвижных массы, каждая из которых состоит из пяти квадратных пластин. Упругие подвесы имеют в сечении вытянутую форму, своими вытянутыми направлениями перпендикулярны плоскости подвижных масс. По одной из сторон каждого из подвесов и растяжек проходят проводники, которые привариваются к электрическим контактным площадкам, расположенным в центре закрепления чувствительного элемента к неподвижному основанию. Подвижные массы могут колебаться только в одной плоскости, чем исключается влияние перекрестных угловых скоростей.
Недостатком данного устройства является то, что данная система закрепления требует тщательной балансировки чувствительного элемента, так как в процессе изготовления последнего из-за неоднородности травления, а также из-за неравнотолщинности монокристаллических пластин кремния, из которых изготавливаются чувствительные элементы микромеханических гироскопов, происходит расбаланс масс и неоднородность жесткости подвесов соответствующих масс, что приводит к резкому снижению добротности системы. И только очень трудоемкая балансировка может позволить свести к нулю все нежелательные моменты. Наиболее близким по технической сути является чувствительный элемент микромеханического гироскопа, содержащий основание, прямоугольную внутреннюю рамку, центр, соединенный четырьмя жесткими растяжками с внутренней рамкой, четыре подвижные массы, каждая из которых соединена с центром двумя упругими Г-образными подвесами, а с внутренней рамкой шестью упругими Г-образными подвесами, чувствительный элемент дополнительно содержит внешнюю рамку, соединенную с внутренней рамкой четырьмя перемычками, расположенными по осям симметрии чувствительного элемента, по одной перемычке по каждой стороне рамок, и соединенную с основанием через четыре площадки крепления, расположенные в углах внешней рамки [3]. Недостатком данного устройства является то, что прямоугольная рамка с четырьмя растяжками является источником потери энергии данной колебательной системой, так как деформационные силы в точке закрепления Г-образных подвесов и внутренней рамки и растяжек, не совсем равны нулю и деформируют рамку и растяжки. Увеличивая ширину внутренней рамки и растяжек можно свести к нулю напряжения. Однако это значительно увеличивает габариты чувствительного элемента, то есть невозможно обеспечить максимальную добротность колебательной системы, которой определяется точность прибора в целом.
Другим существенным недостатком является то, что в прототипе отсутствует балансировка. А так как из-за неоднородности травления происходит расбаланс масс и неоднородность жесткости подвесов соответствующих масс, что приводит к разночастотности колебательных контуров и дополнительному снижению добротности системы.
Задачей, на решение которой направлено изобретение, является повышение точности микромеханического гироскопа.
Эта задача решается за счет того, что в чувствительный элемент микромеханического гироскопа, содержащий основание, прямоугольную внутреннюю рамку, центр, соединенный четырьмя жесткими растяжками с внутренней рамкой, четыре подвижные массы, каждая из которых соединена с центром двум упругими Г-образными подвесами, а с внутренней рамкой шестью упругими Г-образными подвесами, внешнюю рамку, соединенную с внутренней рамкой четырьмя перемычками, внутренняя рамка с четырьмя жесткими растяжками выполнена с Х-образным поперечным сечением и дополнительно содержит перемычки, соединяющие Г-образные подвесы с внутренней рамкой и жесткими растяжками, расположенными в углах, местах сопряжения Г-образных подвесов с внутренней рамкой и жесткими растяжками.
Повышению добротности колебательной системы чувствительного элемента способствует то, что заявленный чувствительный элемент имеет внутреннюю рамку с четырьмя жесткими растяжками в виде X-образного профиля, ориентированного по направлению (111) кристаллографической решетки монокристаллического кремния. Такая ориентация торсионов по отношению к осям кристаллографической решетки кремния обеспечивает наибольшую жесткость к изгибным деформациям по сравнению с другими профилями при одинаковых габаритных размерах. Таким образом, потери энергии данной колебательной системой равны нулю, добротность предложенного чувствительного элемента является достаточно высокой по сравнению с прототипом, что, естественно, повышает и точность измерения.
Повышение точности обусловлено тем, что в местах сопряжения Г-подвесов с внутренней рамкой и растяжками дополнительно выполнены перемычки, соединяющие Г-образные подвесы с внутренней рамкой и растяжками. Перемычки шунтируют Г-образные подвесы, увеличивая их жесткость. Измеряя известным способом собственные частоты отдельных контуров колебательной системы в различных направлениях, удалением перемычек регулируется и сводится к нулю разночастотность обеих контуров. Тем самым с большой точностью сводятся собственные частоты, обеспечивая высокую чувствительность и точность.
На фиг.1 показан вид сверху чувствительного элемента микромеханического гироскопа. Цифровые позиции на чертежах имеют следующие обозначения:
1 - внешняя рамка;
2 - подвижная масса (всего 4 массы);
3 - внутренняя рамка чувствительного элемента;
4 - перемычки для балансировки;
5 - центр;
6 - жесткая растяжка (всего четыре растяжки);
7 - Г-образный упругий подвес (всего тридцать два).
Все четыре подвижные массы 2 являются одинаковыми и каждая состоит из пяти квадратных пластин, как показано на чертеже фиг.1. Внешняя рамка 1 связана с внутренней рамкой 3 жесткими переходами, которые расположены по осям симметрии чувствительного элемента. Все 32 упругих подвеса являются одинаковыми, имеют большую жесткость в направлении, перпендикулярном плоскости чувствительного элемента (ось z), и малую жесткость в направлении осей х и у. В связи с этим подвижные массы 2 имеют возможность перемещаться только в плоскости пластины. По углам внешней рамки 1 расположены четыре площадки для жесткого крепления внешней рамки 1 к неподвижному стеклянному основанию (на чертеже не показаны). Растяжки 6 соединяют центр 5 чувствительного элемента с каждой из четырех сторон внутренней рамки 3. Шунтирующие перемычки 4 соединяют Г-образные подвесы 7 с внутренней рамкой 3 и жесткими растяжками 6, расположенными в углах, местах сопряжения Г-подвесов 7 с внутренней рамкой 3 и жесткими растяжками 6. На фиг.2 показан профиль внутренней рамки и растяжек.
Чувствительный элемент микромеханического гироскопа работает следующим образом.
При подаче на прибор питания подвижные массы 2 начинают попарно колебаться по оси Х в противофазе друг другу на резонансной частоте. При вращении чувствительного элемента относительно оси Z на подвижные массы 2 начинает действовать кориолисово ускорение, направление которого зависит от направления от направления линейной скорости, а величина определяется величиной угловой скорости. Кориолисово ускорение преобразуется в знакопеременную кориолисову силу, которая перемещает каждую подвижную массу 2 в направление, перпендикулярное действующей в данный момент линейной скорости возбуждения и воздействующей внешней угловой скорости, при этом в преобразователе перемещения наводится э.д.с., пропорциональная внешней угловой скорости.
Источники информации
1. Патент США №5952572, выдан 14.09.1999 г. МПК G01P 9/00,
2. Патент РФ №2222780, опубликован 27.01.2004 г. МПК G01C 19/56, G01P 9/04.
3. Патент РФ №2301969, опубликован 27.06.2007 г. МПК G01C 19/56, G01P 9/04 (прототип)
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА | 2005 |
|
RU2301969C1 |
| Чувствительный элемент микромеханического гироскопа | 2022 |
|
RU2807466C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА | 2002 |
|
RU2222780C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2379630C1 |
| КАМЕРТОННЫЙ МИКРОГИРОСКОП | 2014 |
|
RU2580871C1 |
| МИКРОСИСТЕМНЫЙ ГИРОСКОП | 2011 |
|
RU2466354C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2001 |
|
RU2209394C2 |
| МИКРОМЕХАНИЧЕСКИЙ ДАТЧИК УГЛОВОЙ СКОРОСТИ | 2003 |
|
RU2234679C2 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2010 |
|
RU2485444C2 |
| СПУТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2016 |
|
RU2627014C1 |

Изобретение относится к измерительной технике и может применяться в интегральных гироскопах вибрационного типа. Техническим результатом изобретения является повышение точности гироскопа. Чувствительный элемент микромеханического гироскопа содержит основание, прямоугольную внутреннюю рамку, центр, соединенный четырьмя жесткими растяжками с внутренней рамкой, четыре подвижные массы, каждая из которых соединена с центром двумя упругими Г-образными подвесами, а с внутренней рамкой - шестью упругими Г-образными подвесами, внешнюю рамку, соединенную с внутренней рамкой четырьмя переходами. Дополнительно содержит перемычки, соединяющие Г-образные подвесы с внутренней рамкой и жесткими растяжками, расположенными в углах, местах сопряжения Г-образных подвесов с внутренней рамкой и жесткими растяжками. Внутренняя рамка с четырьмя жесткими растяжками выполнена с Х-образным поперечным сечением. 2 ил.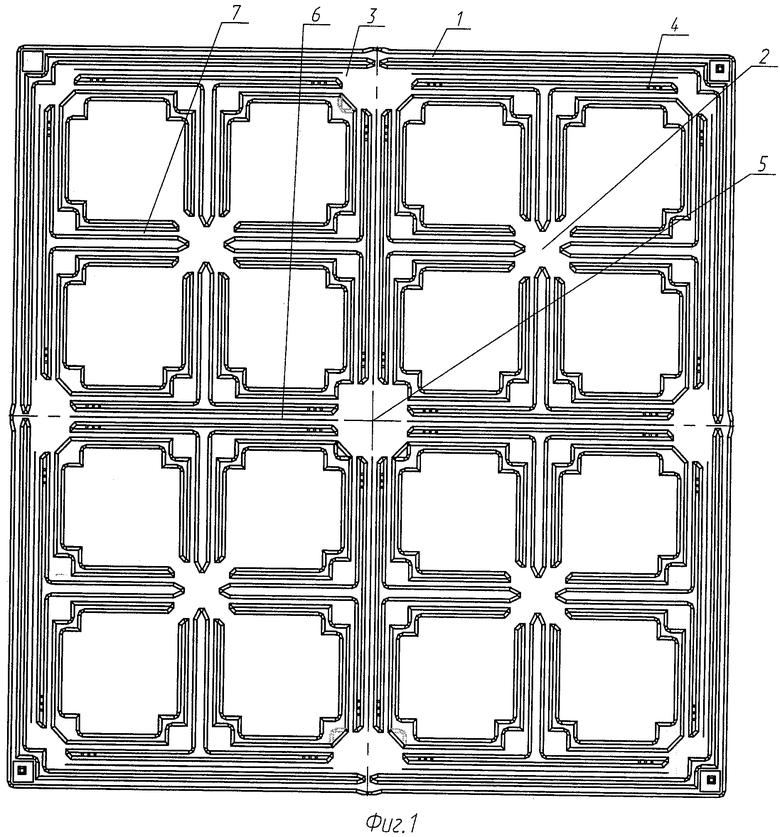
Чувствительный элемент микромеханического гироскопа, содержащий основание, прямоугольную внутреннюю рамку, центр, соединенный четырьмя жесткими растяжками с внутренней рамкой, четыре подвижные массы, каждая из которых соединена с центром двумя упругими Г-образными подвесами, а с внутренней рамкой - шестью упругими Г-образными подвесами, внешнюю рамку, соединенную с внутренней рамкой четырьмя переходами, отличающийся тем, что дополнительно содержит перемычки, соединяющие Г-образные подвесы с внутренней рамкой и жесткими растяжками, расположенными в углах, местах сопряжения Г-образных подвесов с внутренней рамкой и жесткими растяжками, а внутренняя рамка с четырьмя жесткими растяжками выполнена с Х-образным поперечным сечением.
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА | 2005 |
|
RU2301969C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА | 2002 |
|
RU2222780C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ИНТЕГРАЛЬНОГО АКСЕЛЕРОМЕТРА | 2003 |
|
RU2246734C1 |
| RU 84541 U1, 10.07.2009 | |||
| US 5952572 А, 14.13.1999. | |||

