Изобретение относится к области гироскопической техники и может быть использовано в системах управления подвижных объектов различного назначения, а также в качестве индикаторов движения объектов.
Известны микромеханические гироскопы (ММГ) [1, 2, 3].
Известные ММГ [1, 2] содержат инерционный элемент, размещенный на внутренней рамке, две пары упругих элементов (торсионов), соединяющих между собой внутреннюю рамку с внешней, а внешнюю рамку - с корпусом, соединенным с диэлектрической пластиной, на которую нанесены электроды, образующие с рамками датчики угла и момента.
Особенностью ММГ является изготовление чувствительных элементов этих приборов преимущественно из материалов на основе кремния, обеспечивающее малые габариты и вес ММГ, возможность применения групповой технологии, а также высокую надежность при эксплуатации.
Вследствие малых размеров электродов высокое влияние на точность измерения оказывают паразитные емкости.
С целью уменьшения влияния паразитных связей между электродами в качестве материала для диэлектрического основания используют специальные сорта стекла, имеющие наиболее близкий кремнию термический коэффициент линейного расширения (ТКЛР), но несмотря на близость ТКЛР разница все равно сохраняется, и изменение температуры приводит к изменению натяжения торсионов, связывающих внешнюю рамку и корпус, изменения натяжения второй пары торсионов, связывающих внешнюю и внутреннюю рамки, практически не происходит, вследствие чего возникает рассогласование резонансных частот, что приводит к снижению точности ММГ, так как известно, что резонансная частота собственных колебаний внутренней рамки должна совпадать с частотой принудительных колебаний внешней рамки, которая должна быть равна ее собственной частоте.
Даже использование кремниевой пластины с покрытием в виде двуокиси кремния в качестве диэлектрического основания вместо стекла, приводящее к внесению дополнительных паразитных емкостей, не обеспечивает равенство ТКЛР чувствительного элемента и диэлектрического основания.
Наиболее близким по технической сущности к заявленному изобретению является ММГ [3], содержащий инерционный элемент, размещенный на внутренней рамке, две пары упругих крестообразных торсионов, соединяющих между собой внутреннюю рамку с внешней, а внешнюю рамку - с корпусом, соединенным с диэлектрической пластиной, на которую нанесены электроды. По сравнению с описанными выше ММГ [1, 2] он обладает более высокими точностными и прочностными характеристиками т.к. известно, что в крестообразных торсионах отношение изгибной жесткости к крутильной наивысшее. Однако, как и описанные выше ММГ [1, 2], он обладает недостаточной точностью и ограниченным температурным диапазоном работы. Это обусловлено, в первую очередь, разницей ТКЛР между кремнием и материалом диэлектрической платы.
Задачей предлагаемого изобретения является повышение точности микромеханического акселерометра и расширение его температурного диапазона работы.
Для достижения поставленной задачи в ММГ, содержащий две пары крестообразных торсионов, внутреннюю и наружную рамки, соединенные между собой первой парой крестообразных торсионов, электрическую плату, представляющую диэлектрическую пластину с двумя или более парами электродов, симметрично расположенными относительно осей торсионов под внутренней и наружной рамками, введено основание, соединенное с электрической платой, причем внутренняя рамка соединяется с основанием с помощью второй пары крестообразных торсионов.
Расстояние между точками соединения электрической платы с основанием много меньше, чем расстояние между точками соединения электрической платы с корпусом в прототипе. Поэтому при воздействии температуры разница удлинений электрической платы и основания много меньше, чем разница удлинений платы и корпуса в прототипе. Так как длина торсионов одинакова, то и влияние на натяжение (резонансную частоту) в предлагаемом изобретении, а следовательно, и на точность меньше, обеспечивая работу в расширенном температурном диапазоне.
Максимальный положительный эффект достигается в том случае, если форма основания обеспечивает его соединение с электрической платой в одной точке.
Изобретение иллюстрируется графическими материалами, где изображено:
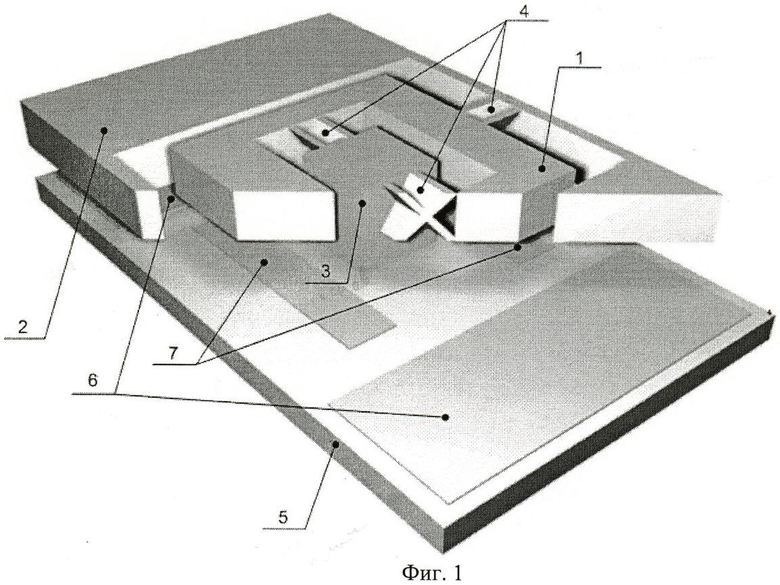
Фиг.1 - конструктивная схема ММГ, где:
1 - внутренняя рамка, 2 - внешняя рамка, 3 - основание, 4 - торсионы,
5 - электрическая плата, 6 - электроды емкостного датчика,
7 - электроды электростатического датчика момента.
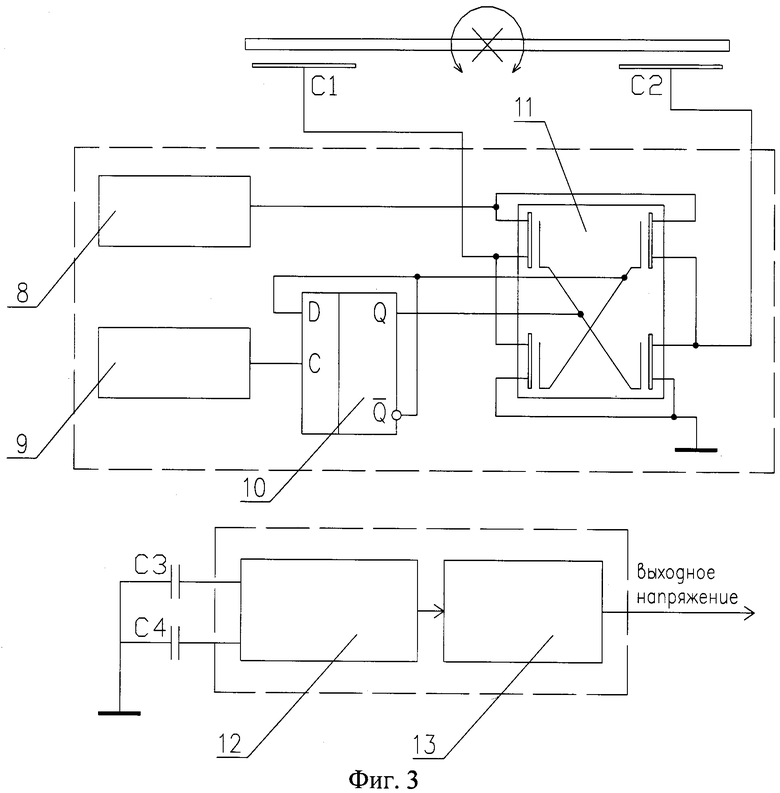
Фиг.2 - расположение осей ММГ.
Фиг.3 - схема возбуждения колебаний внутренней рамки ММГ, где:
8 - источник питания,
9 - задающий генератор,
10 - счетный триггер, где D - информационный вход, С - динамический вход, Q - прямой выход,  - инверсный выход,
- инверсный выход,
11 - ключевое устройство,
12 - узел преобразования дифференциальной емкости в напряжение,
13 - узел преобразования переменного напряжения в постоянное.
ММГ согласно изобретению содержит (Фиг.1) внутреннюю рамку 1, соединенную с основанием 3 и внешней рамкой 2 с помощью торсионов 4, диэлектрическую плату 5, соединенную с основанием, электроды емкостного датчика 6 перемещений и электростатического датчика момента 7.
Под внутренней рамкой на диэлектрической плате расположены возбуждающие электроды, а под внешней рамкой - электроды емкостного преобразователя угловых перемещений. При подаче на возбуждающие электроды пульсирующего (синусоидального с пьедесталом) напряжения внутренняя рамка совершает колебательные движения вокруг оси Х (Фиг.2). С помощью встроенной электроники задается и поддерживается заданная амплитуда колебаний.
При отсутствии угловой скорости Ωz внешняя рамка совершает вместе с внутренней рамкой колебательные движения относительно оси Х и не имеет их относительно оси Y.
Межэлектродные емкости для смежных плеч емкостного датчика перемещений изменяются при этом одинаково, в результате дифференциальная емкость остается равной нулю и выходной сигнал на выходе блока измерения также равен нулю. Т.е. ММГ является нечувствительным к таким колебаниям.
При наличии поворотной скорости Ωz на внешнюю рамку действует знакопеременная кориолисова сила, возбуждающая во внешней рамке вращательные колебания относительно оси Y. Частота этих колебаний совпадает с частотой вынужденных колебаний внутренней рамки, а амплитуда колебаний является пропорциональной поворотной скорости Ωz.
Как известно, собственная частота крутильных колебаний маятника на торсионном подвесе определятся по известной формуле
 ,
,
где G - жесткость торсионного подвеса на кручения, J - момент инерции маятника.
Оптимальным режимом работы гироскопа является [3] случай, когда собственная частота внешней рамки совпадает с частотой возбуждения внутренней рамки. Поэтому, исходя из формулы выше, без учета воздействия внешней среды, условием динамической настройки являются следующие соотношения:
G1/J1≠G2/J2, ωвозб=G1/J2,
где J1 - момент инерции внешней рамки относительно оси Y, a J2 - суммарный момент обоих рамок относительно оси Х (т.к. относительно оси Х внешняя и внутренняя рамки связанны жестко); G1 и G2 - жесткости подвесов внешней и внутренней рамок.
В практических конструкциях микрогироскопов собственные частоты внешней и внутренней рамок определяются значительно сложнее, так как на подвижные узлы кроме сил инерции и упругости могут воздействовать силы демпфирования и компенсации перемещений.
Схема возбуждения (Фиг.3) включает в свой состав источник опорного напряжения 1, задающий генератор 2, ключевое устройство 4, управляемое счетным триггером 3 и переключающее опорное напряжение между неподвижными обкладками электростатического датчика момента (емкости С1 и С2). Поочередное переключение опорного напряжения с одной обкладки на другую приводит к возникновению вращательных колебательных движений внутренней рамки. К электродам емкостного датчика (С3 и С4) подключается блок обработки сигналов, который включает в себя узел 5 преобразования дифференциальной емкости в напряжение, соединенный с преобразователем 6 переменного напряжение в постоянное.
Внутренняя и наружная рамка, две пары крестообразных торсионов и основание сформированы из кремниевой пластины путем анизотропного травления кремния в плоскостях (100) и (111) щелочным травителем с последующим изотропным полированием. Электрическая плата выполнена из полированного оптического стекла ЛК-105, на котором методом напыления нанесен слой алюминия (или золота). Электроды необходимой формы сформированы путем травления. Соединение основания с электрической платой из стекла производилось методом анодного сращивания и методом эвтектической пайки. При этом в первом случае электроды были выполнены из алюминия, а во втором - из золота. Экспериментальные исследования вариантов соединения основания с электрической платой показали достаточно схожие результаты.
Источники информации
1. Патент РФ 2178548.
2. Распопов В.Я. Микромеханические приборы. Учебное пособие. Тул. Гос. Университет. Тула, 2002, 253 стр.
3. Патент РФ 2248525 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2006 |
|
RU2315265C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2007 |
|
RU2347190C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП RR-ТИПА | 2008 |
|
RU2375678C1 |
| ЭЛЕКТРОДНАЯ СТРУКТУРА ДЛЯ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА И МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП НА ЕЕ ОСНОВЕ | 2006 |
|
RU2320962C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП (ВАРИАНТЫ) И СПОСОБЫ ЕГО НАСТРОЙКИ, ОСНОВАННЫЕ НА ИСПОЛЬЗОВАНИИ АМПЛИТУДНО-МОДУЛИРОВАННОГО КВАДРАТУРНОГО ТЕСТОВОГО ВОЗДЕЙСТВИЯ | 2008 |
|
RU2388999C1 |
| ЭЛЕКТРОДНАЯ СТРУКТУРА ДЛЯ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА И МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП С ЭТОЙ СТРУКТУРОЙ (ВАРИАНТЫ) | 2007 |
|
RU2344374C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОТРОН | 2008 |
|
RU2403537C2 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОСИСТЕМНОГО ГИРОСКОПА | 2014 |
|
RU2556334C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ ПЕРЕКРЕСТНЫХ ЖЕСТКОСТИ И ДЕМПФИРОВАНИЯ ПОДВЕСА МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА И МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП, В КОТОРОМ РЕАЛИЗОВАН ДАННЫЙ СПОСОБ | 2007 |
|
RU2346239C1 |
| МИКРОМЕХАНИЧЕСКИЙ АКСЕЛЕРОМЕТР | 2004 |
|
RU2251702C1 |
Изобретение относится к инерциальным приборам и может быть использовано в системах управления подвижных объектов различного назначения, а также индикаторах движения объектов. Микромеханический гироскоп содержит внутреннюю и наружную рамки и две пары взаимно перпендикулярных крестообразных торсионов с поперечным сечением в виде Х-образного профиля. Одна из пар торсионов соединяет внешнюю рамку с внутренней, другая пара - внутреннюю рамку с основанием, соединенным с электрической платой, представляющей собой диэлектрическую пластину с двумя или более парами электродов, симметрично расположенными относительно торсионов под внутренней и наружной рамками, причем основание, рамки и торсионы выполнены из одной пластины монокристаллического кремния. Изобретение позволяет повысить точность измерения и расширить температурный диапазон работы устройства. 3 ил.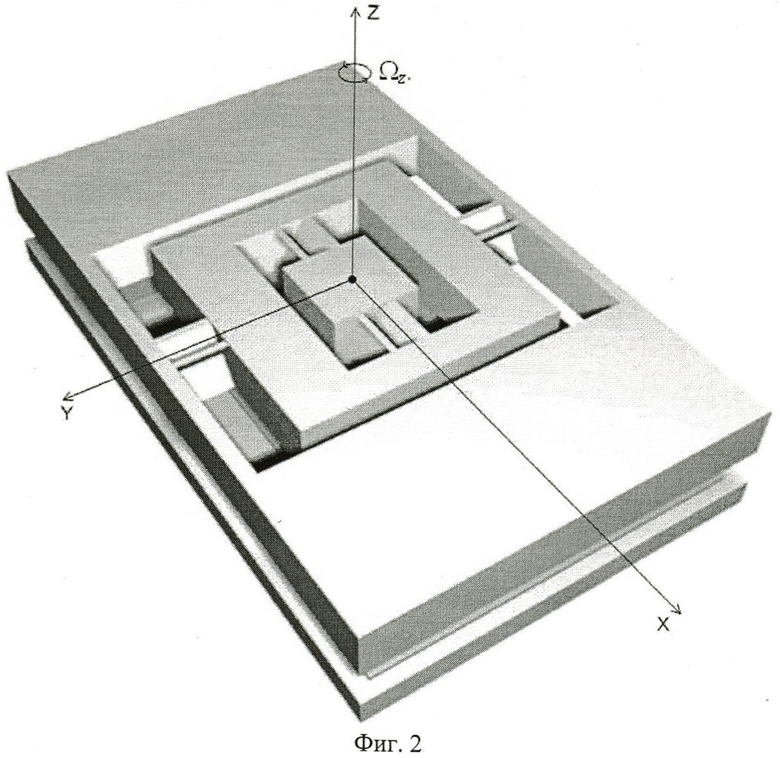
Микромеханический гироскоп, содержащий две пары крестообразных торсионов, внутреннюю и наружную рамки, соединенные между собой первой парой крестообразных торсионов, электрическую плату, представляющую диэлектрическую пластину с двумя или более парами электродов, симметрично расположенными относительно осей торсионов под внутренней и наружной рамками, отличающийся тем, что содержит основание, соединенное с электрической платой, причем внутренняя рамка соединяется с основанием с помощью второй пары крестообразных торсионов.
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2004 |
|
RU2248525C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2000 |
|
RU2178548C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2007 |
|
RU2353903C1 |
| СЕВЕРОВ Л.А | |||
| и др | |||
| Микромеханические гироскопы: конструкции, характеристики, технологии, пути развития | |||
| Изв | |||
| Вузов | |||
| Приборостроение | |||
| Способ и аппарат для получения гидразобензола или его гомологов | 1922 |
|
SU1998A1 |
| CN 101135560 А, 05.03.2008. | |||

