t-,
(
.;
(Л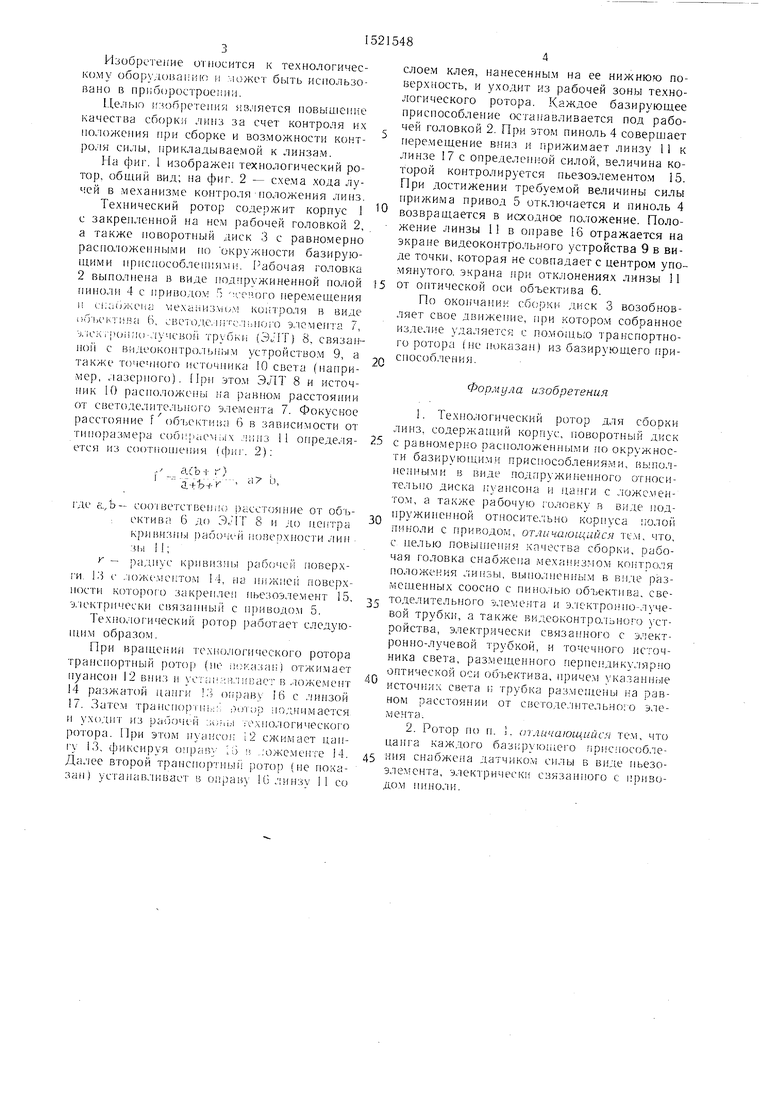
| название | год | авторы | номер документа |
|---|---|---|---|
| Технологический ротор для сборки линз | 1988 |
|
SU1606308A2 |
| Технологический ротор сборки линз в оправах | 1981 |
|
SU1073066A1 |
| СПОСОБ ЦЕНТРИРОВКИ ЛИНЗ ОБЪЕКТИВА ШТАБЕЛЬНОЙ КОНСТРУКЦИИ И ОПРАВЫ ЛИНЗ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2602419C2 |
| Способ определения радиусов кривизны сферических поверхностей и устройство для его осуществления | 1988 |
|
SU1562691A1 |
| СПОСОБ ЮСТИРОВКИ ОПТИЧЕСКОГО ПРИБОРА | 1999 |
|
RU2159948C1 |
| Устройство для считывания изображения со снимков | 1982 |
|
SU1081416A1 |
| Устройство для контроля центрировки и качества склеенных компонентов | 1981 |
|
SU1015273A1 |
| Устройство для измерения величины зональных аберраций параболоидных вогнутых поверхностей изделий | 1981 |
|
SU974116A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ УСТРОЙСТВ ДЛЯ ХРАНЕНИЯ ИНФОРМАЦИИ (ВАРИАНТЫ) | 1996 |
|
RU2188464C2 |
| УСТРОЙСТВО ДЛЯ ЦЕНТРИРОВКИ ЛИНЗ | 1988 |
|
SU1841111A1 |
Изобретение относится к машиностроению и повышает качество сборки за счет контроля положения линзы при сборке и контроля силы, прикладываемой к упомянутой линзе. При вращении диска 3 оправа 16 с линзой 17 устанавливается и фиксируется в ложементе 14 цанги 13. Затем в оправу 16 устанавливается вторая линза 11, на нижнюю поверхность которой нанесен слой клея. Далее базирующее приспособление останавливается под рабочей головкой 2, и пиноль 4 приводом 5 перемещается вниз до упора в линзу 11. При этом сила прижима линзы 11 контролируется пьезоэлементом 15, по сигналу которого привод 5 отключается, и пиноль 4 возвращается в исходное положение. Одновременно на экране видеоконтрольного устройства 9 отражается положение линзы 11 относительно оптической оси объектива 6 в виде светящейся точки. 1 з.п. ф-лы, 2 ил.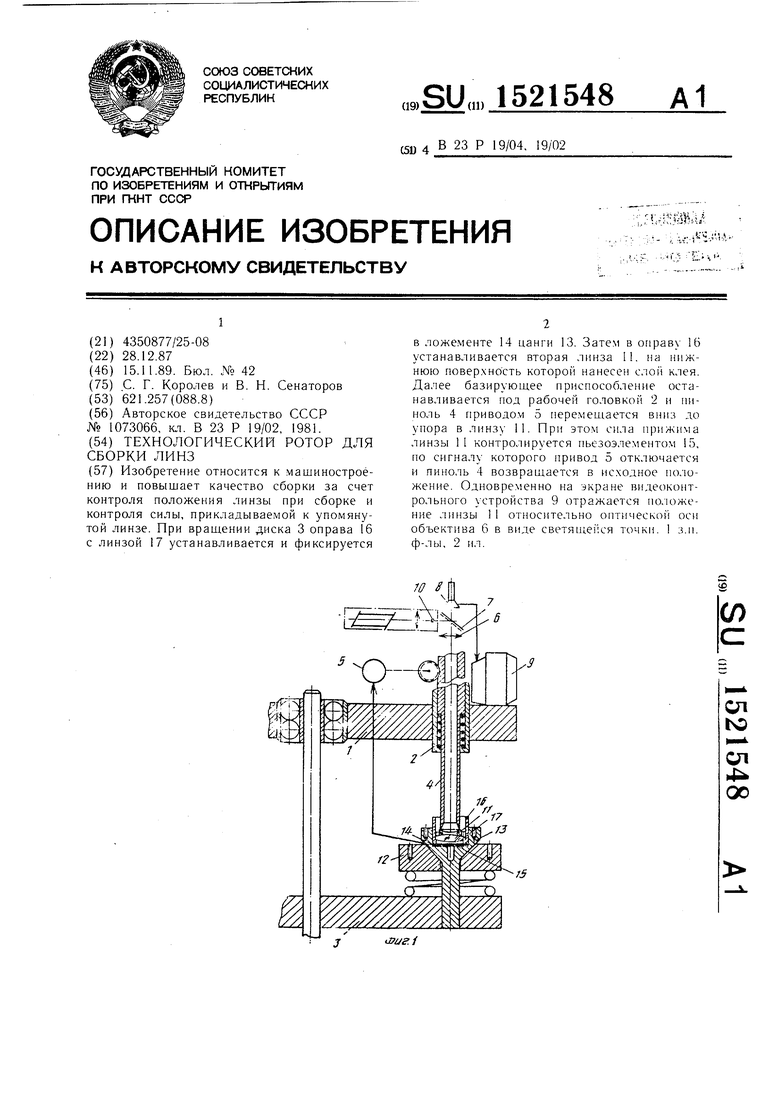
ел ю
СП
4
оо
.1
Изобретение относится к технологическому оборудованик; я может быть иснользо- вано в приборостроемии.
Целью и:()бретения является повышение качества сборк;.) линз за счет контроля их ноложения нри сборке и возможности контроля силы, нрнкладываемой к линзам.
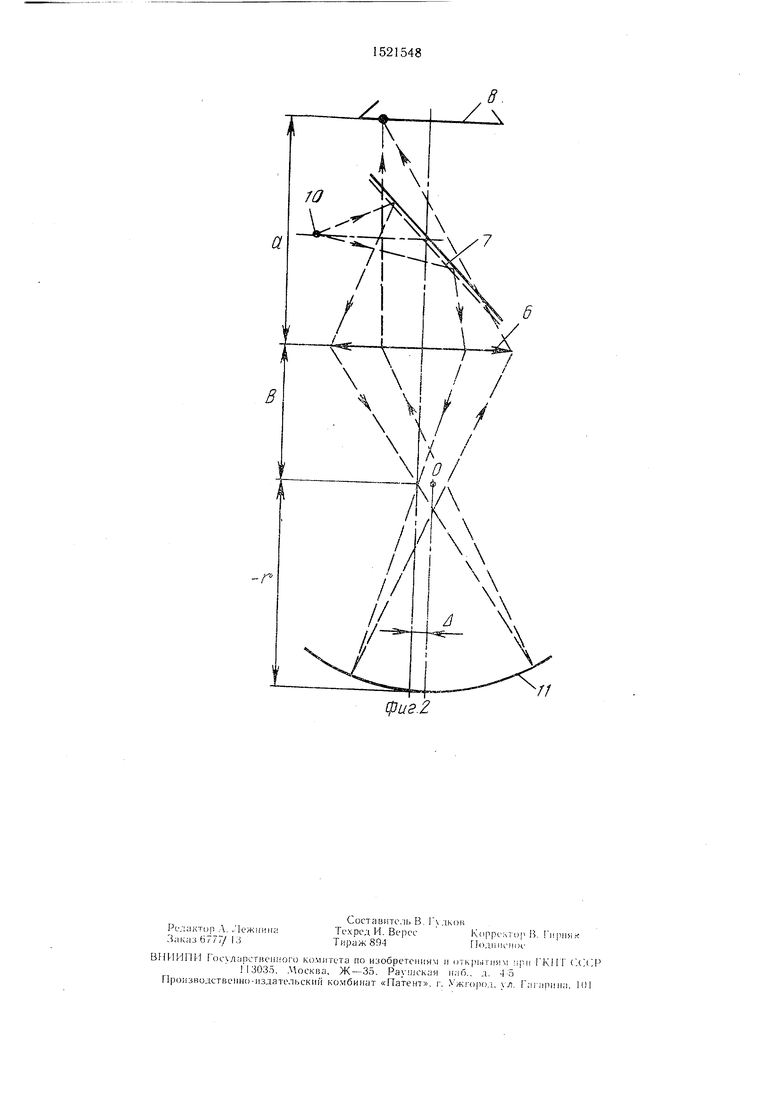
На фиг. I изображен технологический ротор, общий вид; на фиг. 2 - схе.ма .хода лучей в .механизме контроля ноложения линз.
Технический ротор содержит корпус 1 с закренленной на нем рабочей головкой 2, а также новоротный UICK 3 с равно.мерно расположенны.ми но окружности базирую- н;ими приспособлениямii. Рабочая головка 2 выполнена в виде нодпружиненной нолой нино.ли 4 с нрив(хаом ; :re:U)ro перемещения п скабжену еханнзм1ум контроля в виде 1 б ьскт.«а 6, светад.е.iiiTc. iiiHOi O э.лемента 7, v. io.KГ Нлч;;(1-. учсвой Tpv6Ki-i (ЭЛТ) 8, связанно с видеоконтролы1 ым устройство.м 9, а также точечного источника 10 света (например, лазерного). 1рн этом ЭЛТ 8 и источник 10 расположены на })авном расстоянии от светоделительного элеме1гга 7. Фокусное расстояние f объектива 6 в зависимости от типоразмера co6i;jitieMi,ix .линз 11 определяется из cooTHOHJeiiHH ((|)Hi . 2):
ti7 о.
где a.,b- co()iBeTCTBetiii;. расстояние от объектива. 6 до 3,ЛТ 8 и до нентра кривиз1Н)1 рабоч(.ч - | поверхности лин . 31,1 11; - кривиз П)1 рабочей .чс верх1-и, 13 с . юже.менто.м 14, на иижне поверхности к()то|)ого закреплен иьезоэле.мент 15, э, 1ектрически связанны с 1риводо.м 5.
). огичеекий ротор |)аботает следую- ии.м образом.
При вра це11И(1 тех ологического ротора транс 0ртный ротор (не лсказа ;) отжимает 1уанс()н 12 и ст:;1 ;;н, в ..1ожеме1гг 14 разжатой цанги Ь 5 0|)аву 16 е линзой 17. Затем транс1 0)тн..:: . ::и.т;)р но;1.чимается и из рабочс й ;;(;.;ii.-i : 1 ологическо 4) po i opa. При этом уансо ; i2 сжимает цангу 13, 4 И1 - |-фуя ;i.) ,:ожеме 1те 14. Да.чее второй транс1 ортны 1 ротор (не показан) устанав; -1васт в о.чраву 1G :1инзу 11 со
слоем клея, нанесенным на ее нижню.ю по- вер.хноеть, и уходит из рабочей зоны технологического ротора. Каждое базирующее приспособление оста 1авливается под рабочей головкой 2. При этом пиноль 4 совершает перемещение в.низ и прижимает линзу 11 к линзе 17 с определеп юй силой, величина которой контролируется пьезоэлементо.м 15. При достижении требуемой величины силы прижима привод 5 отключается и пиноль 4
возвращается в исходное положение. Положение линзы 11 в онраве 16 отражается на видеоконтрольного устройства 9 в виде точки, которая не совпадает с центром упо- .мянут01 о. экрана .чри отк; онениях линзы 11
от 0 1тической оси объектива 6.
По око)ча11И -: сб(.;рки диск 3 возобновляет свое движе1 ие, ри котором собранное издел е удаляется с по. транспортного ротора (не 11)казан) из базирующего при- с 1особ,чения.
Формула изобретения
с равно. расиоложен).ми .чо окружности базиру 01цими прис особления. ли, выпол- )енными в виде подпружиненного относительно диска i;ya icoHa и &И1- л с ложсмен- To.v:, а также рабочую головку в виде 1од| руЖИНеННОЙ относительно ОЛОГ
с приводом, отличающийся Tt .vi, что, с пелью повы1пе ия качества сборки, рабочая головка снабже а механизгчом .. ш положения , в Bi.ie раз- менаенных соосно с пинолью объект ва, све- тоделительного э;1е.е.чта и э/ ектрон1 о-л че- вой трубк -, а также ви;;.еоконтро, устройства, электричеек 1 связа.1ного с электронно-лучевой трубкой, и точеч 1ого источника света, разме це ного .Г1ер 1ендику. оптической оси объектива, 1 ричем указанные источник света i трубка размеи.ены ia равном расстоянии от светоде.лительног о элемента.
6
//
из.г
| Технологический ротор сборки линз в оправах | 1981 |
|
SU1073066A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
