Изобретение относится к приборостроению и может быть использовано, для управления многопозиционными по- воротньгми переключателями с механической фиксацией при автоматической проверке и контроле электроизмерительных приборов и других миогодиа- пазонных у :тройств.
Целью изобретения является шение надежности выполнения- пере-. ключений и повьштение точности фиксации переключателя.
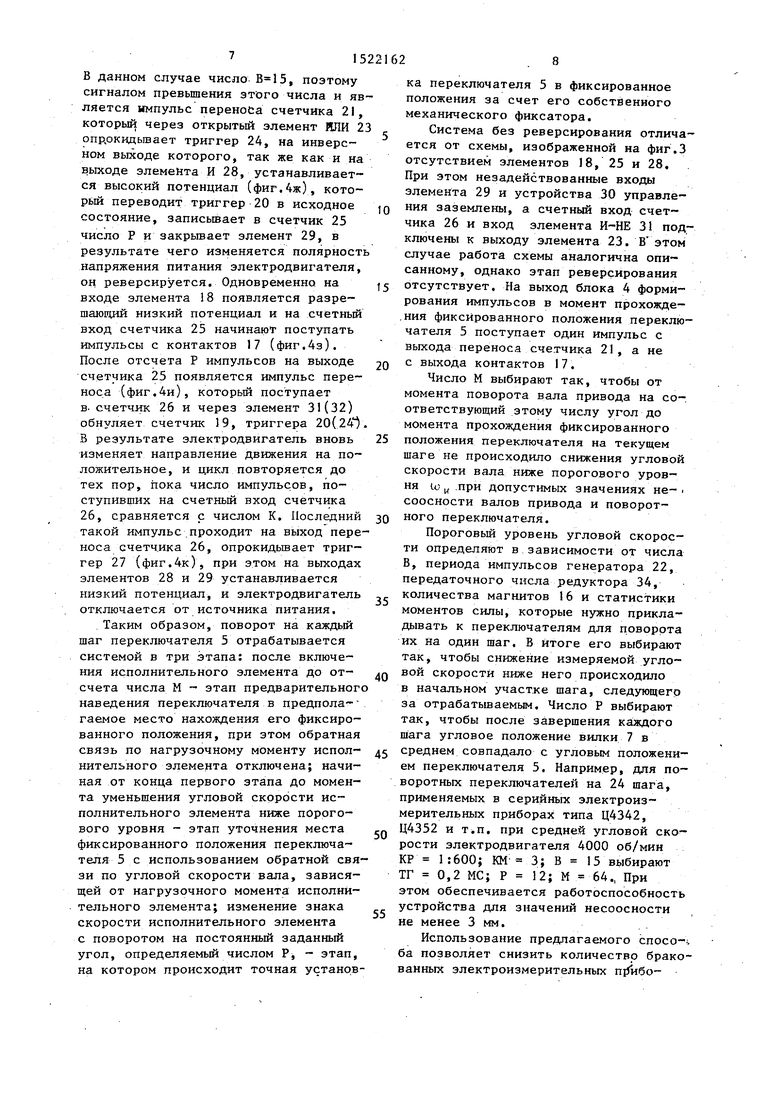
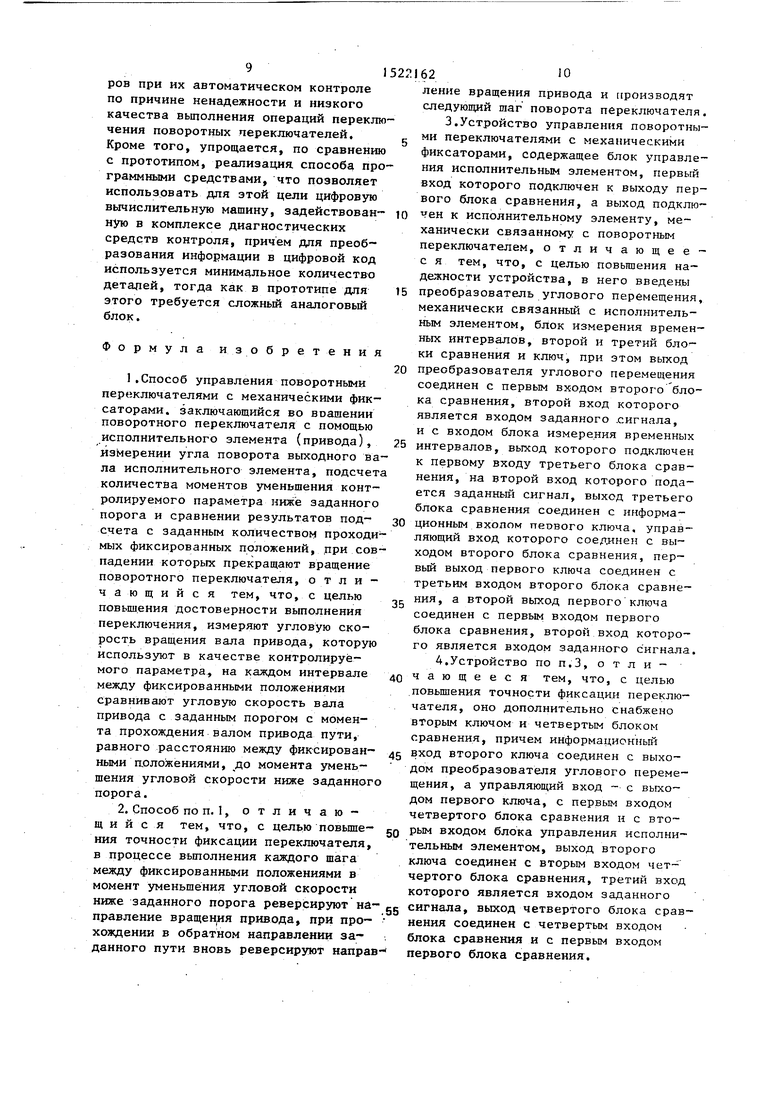
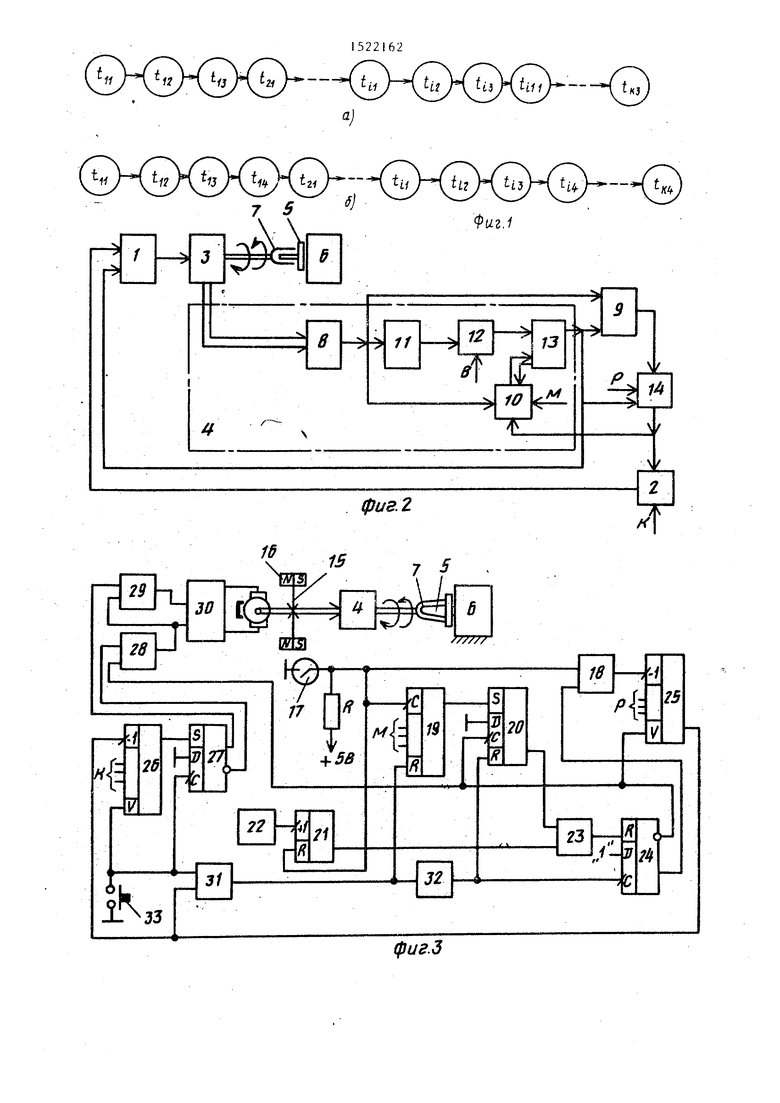
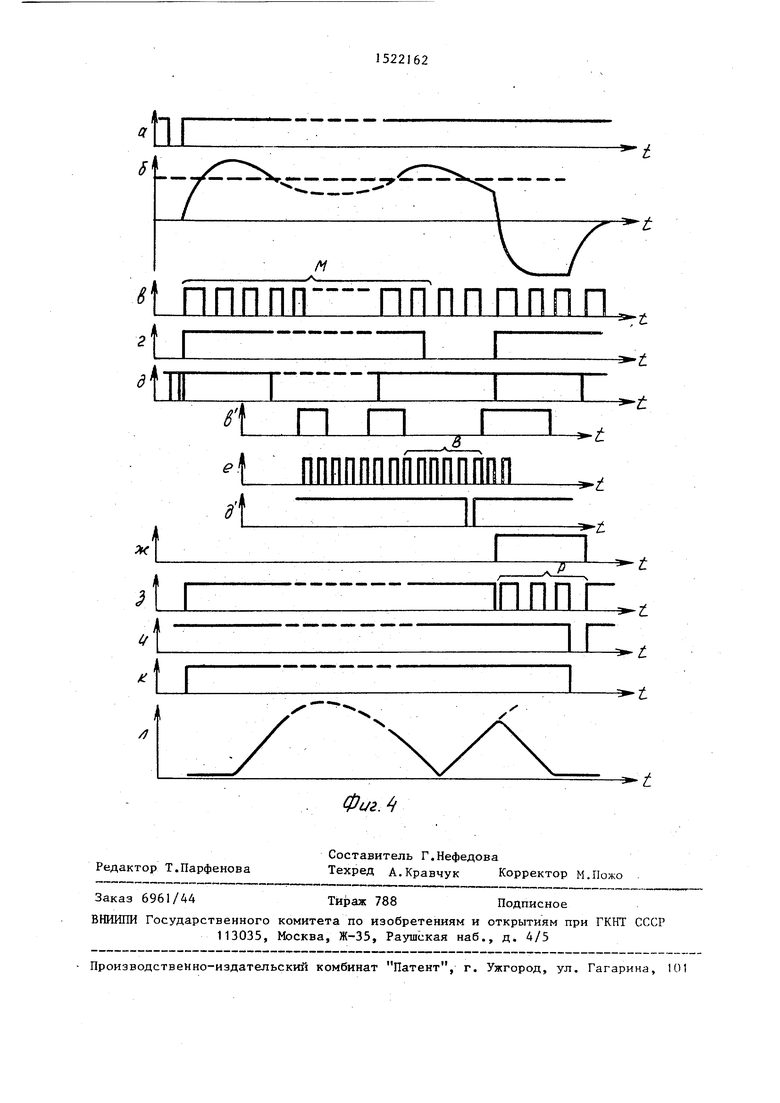
На фиг.1 изображены циклограммы способа; на фиг.2 - структурная схе- ма устройства, осуществляющего предлагаемый способ; на фиг.З - принципиальная схема устройства; на фиг.4 - временные эпюры сигналов устройства.
В состав операций по контролю и поверке комбинированных приборов входит операция, установки поворотного переключателя с механической фиксацией на один из пределов измерительного прибора, на котором производится поверка показаний стрелочного указателя индикатора прибора, Повррот- иьш переключатель с механической фиксацией является неотъемлемой частью комбинированного прибора.и предназначен для поворота такого переключателя из одного фиксированного положения в другое по коду, поступающему из внешней управляющей ЭВМ АСУ ТП. Применение известных следящих приводов, обеспечивающих высокую точность позиционирования за счет наличия позиционной обратной связи, невозможно, поскольку отсутствует позиционная обратная связь объекта управления с устройством управления. Наличие же позиционной обратной связи в самом устройстве управления не обеспечивает точной установки поворотного переключателя по многим причинам, главными из которых являются несоосность привода устройства управления с рукояткой поворотного переключателя, погрешности установки поворотного переключателя в корпусе измерительного прибора, погрешности изготовления рукоятки поворотного переключателя и т.п. В результате црактически возникающая несоосность может достигать 2-3 мм.
В таких условиях параметром, объе тивно отражающим йомент прохождения фиксированного положения поворотного переключателя-,- может служить момент нагрузки на валу привода или другие величины, зависящие от зтого параметра, - ток потребления привода, угловая скорость вала привода.
СпЪсоб управления поворотными переключателями (фиг.-1а) состоит из следующих операций. В начальный момент t j , где (i - номер отрабатываемого шага переключений) начинают вращать поворотный переключатель с помощью привода в прямом направлении. Одновременно измеряют угловое перемещение вала привода до момента t;;j совпадения измеряемого угла поворота вала с заданным.значе0
5
0
5
нием. В интервале t.- t. измеряют времен1{ые параметры угловых перемещений вала, соответствующие угловой скорости привода. В момент 1,.5проис ходит снижение угловой скорости вала, ниже порогового уровня, после чего начинается следуюощй шаг поворота переключателя, т.е. начиная от момента t;, пощаговый цикл повторяется до отработки заданного коли- чества К шагов поворота переключателя.
В усовершенствованном варианте способа (фиг.1б) до момента t , операции происходят в такой же последовательности, как и на фиг,1а, но после момента t;,, начинается процесс вращения привода в противоположном направлении. В это время происходит самоустановка поворотного переключателя в фиксированное положение под воздействием собственного механического фиксатора,, Одновременно во временном промежутке t.- t измеряют угол поворота вала и при достижении им заданного значения (в момент t , ) производят повторное изменение направления вращения привода на противопо- Q ложное и, начина:я от момента t; пощаговый цикл повторяется до отработки заданного количества К шагов поворота переключателя.
Устройство управления поворотными переключателями (фиг.2) содержит блок 1 управления исполнительным элементом, первый вход которого подключен к выходу первого блока 2 сравнения, а выход подключен к исполнительному элементу (приводу) 3, механически связанному с рукояткой поворотного переключателя 5 контролируемого измерительного прибора 6 с помощью вилки 7. Между вилкой 7 и рукояткой поворотного переключателя 5 существует технологический зазор для облегчения их совмещения перед началом цикла переключений. Блок 4 формирования импульсов содержит механически связанный с исполнительным элементом 3 преобразователь 8 углового перемещения в последовательность прямоугольных импульсов, выход которого подключен к входу блока 9 измерения временных интервалов и к входу второго блока 10 сравнения. Выход блока 9 подключен к входу, третьего блока 11 сравнения, а выходы блоков 10 и 11 подключены к входам
5
0
5
0
5
51
первого ключа 12, выход которого подключен к второму входу второго ключа 13 и второму входу блока 1. Выход ключа 13 подключен к иходу четвертого блока 14 сравнения, выход которого подключен к входу блока 2 и четвертому входу блока 10,
На фиг.З блока структурной схемы раскрыты до уровня стандарт-ных функциональных элементов. Исполнительный элемент 3 вьтолнен в виде электродвигателя с редуктором ЗА, преобразователь 8 - в виде неподвижно установленного ,на валу электродви- гателя диска 15с укрепленными на нем.постоянными магнитами 16 и установленного неподвижно магнитоуправ- ляемого контакта 17, срабатьшающего от приближения к нему магнитов 6. В качестве реализации преобразователя 8 может служить и известная оптозлек- тронная схема в виде источника и приемника излучения, подключенного к формирователю прямоугольных импуль- сов, и прерывателя излучения в виде установленного на валу электродвигателя светонепроницаемого диска с окнами. Остальные блоки вьшолнены: ключ 13 - на элементе ИЛИ 18; блок 10 на счетчике 19 и DRS-триггере 20; блоки 9 и IО - на счетчике 21 и подключенном к его счетному входу генераторе 22 прямоугольных импульсов.
ключ 12 - на элементе ИЛИ 23 и DRS
триггере 24; блок 14 - на вычитающем счетчике 25; блок 2 - на вычитающем счетчике 26 и DRS-триггере 27; блок 1 - на элементах И 28, ИЛИ-НЕ 29 и известном устройстве 30 управления электродвигателем, в котором элементы VT8, R43, R44, R45 не используются, а R32 и R40 подключены соответственно к входам элементов 28 и 29 (фиг.З) Дпя обнуления счетчиков и триггеров используются элементы И-НЕ 31 и инвертор 32. Импульс запуска подают, например, с помощью кнопки 33.
На временной диаграмме (фиг,4) показаны: фиг.4а - вход С триггера 27 фиг.4б - изменение угловой скорости вращения вала двигателя; фиг,4в - выход контактов 7; фиг.4в - то же, в увеличенном масштабе времени; . . фиг.4г - выход триггера 20; фиг.4д - выход счетчика 21; то же, в увеличенном масштабе времени; фиг.4е - выход генератора 22, в увеличенном масщтабе времени; фиг.4ж
2
5 0 5 0
5
0 5
5
626
выход (инверсный) триггера 24; фиг.4з- выход элемента ИЛИ 18; фиг.4и - выход счетчика 25; фиг.4к - выход (инверсный) триггера 27; фиг.4л - изменение нагрузочного момента на валу двигателя.
Устройство управления поворотными переключателями работает следующим образом.
В начальном положении электродвигатель обесточен, поворотный переключатель 5 находится в одном из известных фиксированных положений. Дпя перевода переключателя 5 в другое фиксированное положение на информационные входы счетчика 26 подают в виде кода число К - количество фиксированных положений поворотного переключателя, которые нужно отработать, а также подают импульс запуска, обнуляющий счетчик 19 и триггеры 20, 24 и 27 (например, путем кратковременного нажатия кнопки 33). По фронту этого импульса (фиг.4а) код К записывается в счетчик 26, на инверсном выходе триггера 24 устанавливается низкий потенциал, а на выходе элемента 29 - высокий потенциал, и электродвигатель начинает вращаться с положительной угловой скоростью (фиг.4б). При этом на выходе контактов 17 формируется последовательность импульсов (фиг.4в), поступающих на вход счетчика 19. После отсчета счетчиком 19 М входных импульсов на его выходе появляется импульс переноса, опроки- дашающий триггер 20 (фиг.4г). При этом на входе элемента 23 устанавливается разрешающий низкий потенциал, после чего при очередном уменьшении угловой скорости вала двигателя ниже порогового уровня число импульсов генератора 22 (фиг.4е, в ) превьапавт заданное число В, т.е. счетчик 21 оказьшается переполнен и на его выходе появляется импульс переноса
(фиг.4д ).
Изменение угловой скорости вращения вала двигателя обусловлено изменением нагрузочного момента на валу, который зависит от конструкции собственно поворотного переключателя (фиг.4л, где минимум соответствует прохождению фиксированного положения переключателя 5). Пороговый уровень угловой скорости Ц)„(фиг.46) устанавливают путем выбора числа В и длительности периода импульсов генератора 22.
15
В данном случае число , поэтому сигналом превышения этого числа и является импульс переноса счетчика 21, который через открытый элемент ИЛИ 2 рпр.окидьшает триггер 24, на инверсном выходе которого, так же как и на выходе элемента И 28, устанавливается высокий потенциал (фиг.4ж), который переводит триггер 20 в исходное состояние, записьшает в счетчик 25 число Р и закрьшает элемент 29, в результате чего изменяется полярност напряжения питания электродвигателя, он реверсируется. Одновременно на входе элемента 18 появляется разрешающий низкий потенциал и на счетный вход счетчика 25 начинают поступать импульсы с контактов 17 (фиг.4з). После отсчета Р импульсов на выходе счетчика 25 появляется импульс переноса (фиг.4и), который поступает в. счетчик 26 и через элемент 31(32) обнуляет счетчик 19, триггера 20(24 В результате электродвигатель вновь изменяет направление движения на положительное, и цикл повторяется до тех пор, пока число импульсов, поступивших на счетный вход счетчика 26, сравняется с числом К, Последний такой импульс проходит на выход переноса счетчика 26, опрокидьшает триггер 27 (фиг.4к), при этом на выходах элементов 28 и 29 устанавливается низкий потенциал, и электродвигатель отключается от источника питания,
Таким образом, поворот на каждый шаг переключателя 5 отрабатывается системой в три этапа: после включения исполнительного элемента до отсчета числа М - этап предварительного наведения переключателя в предпола- гаемое место нахождения его фиксированного положения, при этом обратная связь по нагрузочному моменту исполнительного элемента отключена; начиная от конца первого этапа до момента уменьшения угловой скорости исполнительного элемента ниже порогового уровня - этап уточнения места фиксированного положения переключателя 5 с использованием обратной связи по угловой скорости вала, зависящей от нагрузочного момента исполнительного элемента; изменение знака скорости исполнительного элемента с поворотом на постоянный заданный угол, определяемый числом Р - этап, на котором происходит точная устанрв
0
5
0
5
162
0
5
0
8
ка переключателя 5 в фиксированное положения за счет его собственного механического фиксатора.
Система без реверсирования отличается от схемы, изображенной на фиг.З отсутствием элементов 18, 25 и 28. При этом незадействованные входы элемента 29 и устройства 30 управления заземлены, а счетный вход счетчика 26 и вход элемента И-НЕ 31 подключены к выходу элемента 23. В этом случае работа схемы аналогична описанному, однако этап реверсирования отсутствует. На выход блока 4 формирования импульсов в момент прохожде- . ния фиксированного положения переключателя 5 поступает один импульс с выхода переноса счетчика 21, а не с выхода контактов 17.
Число М выбирают так, чтобы от момента поворота вала привода на соответствующий этому числу угол до момента прохождения фиксированного положения переключателя на текущем шаге не происходило снижения угловой скорости вала ниже порогового уровня (.0 1 .при допустимых значениях не- соосности валов привода и поворотного переключателя.
Пороговый уровень угловой скорости определяют в зависимости от числа В, периода импульсов генератора 22, передаточного числа редуктора 34, количества магнитов 16 и статистики моментов силы, которые нужно прикладывать к переключателям для поворота их на один шаг. В итоге его выбирают так, чтобы снижение измеряемой угловой скорости ниже него происходило в начальном участке щага, следующего за отрабатываемым. Число Р выбирают так, чтобы после завершения каждого
шага угловое положение вилки 7 в среднем совпадало с угловым положением переключателя 5. Например, для поворотных переключателей на 24 шага, применяемых в серийных электроизмерительных приборах типа Ц4342, Ц4352 и . при средней угловой скорости электродвигателя 4000 об/мин КР 1:600; КМ- 3; В 15 выбирают ТГ 0,2 МС; Р 12; М 64., При этом обеспечивается работоспособность устройства для значений несоосности не менее 3 мм.
Использование предлагаемого cnoco-i ба позволяет снизить количество бракованных электроизмерительных п ибо91
ров при их автоматическом контроле по причине ненадежности и низкого качества выполнения операций переключения поворотных переключателей. Кроме того, упрощается, по сравнению с прототипом, реализация способа программными средствами, что позволяет использовать для этой цели цифровую вычислительную машину, задействован™ ную в комплексе диагностических средств контроля, причем для преобразования информации в цифровой код используется минимальное количество деталей, тогда как в прототипе для этого требуется сложньй аналоговый блок.
Формула изобретения
1.Способ управления поворотными переключателями с механическими фиксаторами, заключающийся во воашении поворотного переключателя с помощью исполнительного элемента (привода), измерении угла поворота выходного вала исполнительного элемента, подсчета количества моментов уменьшения контролируемого параметра ниже заданного порога и сравнении результатов под- счета с заданным количеством проходимых фиксированных положений, при совпадении которых прекращают вращение поворотного переключателя, отличающийся тем, что, с целью повышения достоверности вьшолнения переключения, измеряют угловую скорость вращения вала привода, которую используют в качестве контролируемого параметра, на каждом интервале между фиксированными положениями сравнивают угловую скорость вала привода с заданным порогом с момента прохождения валом привода пути, равного расстоянию между фиксирован- ными положениями, до момента уменьшения угловой скорости ниже заданного порога.
2. Способ поп. 1, отличающийся тем, что, с целью повьш1е- ния точности фиксации переключателя, в процессе вьтолнения каждого шага между фиксированными положениями в момент уменьшения угловой скорости ниже заданного порога реверсируют на- правление вpaщeн я привода, при про- хождении в обратном направлении заданного пути вновь реверсируют направ
62
10
5
0
35
5 о Q 5
Q gg
ление вращения привода и роизводят следующий шаг поворота переключателя.
3.Устройство управления поворотными переключателями с механическими фиксаторами, содержащее блок управления исполнительным элементом, первый вход которого подключен к выходу первого блока сравнения, а выход подключен к исполнительному элементу, механически связанному с поворотным переключателем, отличающее- с я тем, что, с целью повышения надежности устройства, в него введены преобразователь углового перемещения, механически связанный с исполнительным элементом, блок измерения временных интервалов, второй и третий блоки сравнения и ключ, при этом выход преобразователя углового перемещения соединен с первым входом второго блока сравнения, второй вход которого является входом заданного .сигнала, и с входом блока измерения временных интервалов, выход которого подключен к первому входу третьего блока сравнения, на второй вход которого подается заданный сигнал, выход третьего блока сравнения соединен с информационным в хопом пеового ключа, управляющий вход которого соединен с выходом второго блока сравнения, пер- вьш выход первого ключа соединен с третьим входом второго блока сравнения, а второй выход первого ключа соединен с первым входом первого блока сравнения, второй вход которого является входом заданного с игнала.
4.Устройство по п.3, о т л и - чающееся тем, что, с целью повьшения точности фиксации переключателя, оно дополнительно снабжено вторым ключом и четвертым блокам сравнения, причем информационньй вход второго ключа соединен с выходом преобразователя углового перемещения, а управляющий вход с выходом первого ключа, с первым входом четвертого блока сравнения и с вторым входом блока управления исполнительным элементом, выход второго ключа соединен с вторым входом чет- чертого блока сравнения, третий вход которого является входом заданного сигнала, выход четвертого блока сравнения соединен с четвертым входом блока сравнения и с первым входом первого блока сравнения.
1ХчиЯ)--Чь
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ВАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2017156C1 |
| Устройство для управления позиционированием шпинделя станка | 1980 |
|
SU931377A1 |
| Система автоматического управления трубогибочным станом | 1987 |
|
SU1505624A1 |
| Устройство для автовождения колесных машинно-тракторных агрегатов | 1984 |
|
SU1235458A1 |
| МИШЕННАЯ УСТАНОВКА | 1991 |
|
RU2021578C1 |
| Делительное устройство | 1986 |
|
SU1468715A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СТЕНДОМ ДЛЯ ШЕРОХОВКИ ПОВЕРХНОСТИ ЛИСТА | 1990 |
|
RU2009833C1 |
| Устройство для программного управления намоточным станком | 1989 |
|
SU1725184A1 |
| СИСТЕМА УПРАВЛЕНИЯ РАБОТОЙ ФОРСУНКИ РАЗБРЫЗГИВАТЕЛЯ | 1993 |
|
RU2025954C1 |
| Формирователь импульсов углового положения коленчатого вала | 1981 |
|
SU1030823A1 |
Изобретение относится к приборостроению и может быть использовано для управления многопозиционными поворотными переключателями с механической фиксацией при автоматической проверке и контроле электроизмерительных приборов и других многодиапазонных устройств. Целью изобретения является повышение надежности выполнения переключений и повышение точности фиксации переключателя. В соответствии с изобретением при необходимости установки поворотного переключателя в заданное положение определяют фиксированное число шагов. Затем дают команду на поворот привода. После поворота вала привода на угол, соответствующий одному шагу, сравнивают измеряемые значения угловой скорости вращения вала привода с определенным, заранее рассчитанным порогом. При уменьшении угловой скорости вала привода ниже этого порога перестают сравнивать угловую скорость вала привода с порогом и реверсируют направление вращения привода. После поворота вала привода в обратном направлении на расчитанный угол фиксатор оказывается в районе своего номинального положения на первом шаге. Вновь реверсируют направление вращения вала двигателя, после чего проходят путь, равный углу поворота к второму фиксированному положению. С этого момента повторно начинают сравнивать угловую скорость вращения вала двигателя с заданным порогом. И так повторяют указанные действия до тех пор, пока число моментов уменьшения скорости вращения вала привода не сравняется с заданным числом шагов поворота. 2 н.п. ф-лы, 4 ил. 2 з.п. ф-лы.
1д
15
(из
Фиг.1
7 5
а
77777
фиг.З
| Способ защиты от превышения скорости частотного электропривода | 1976 |
|
SU702454A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |
