О5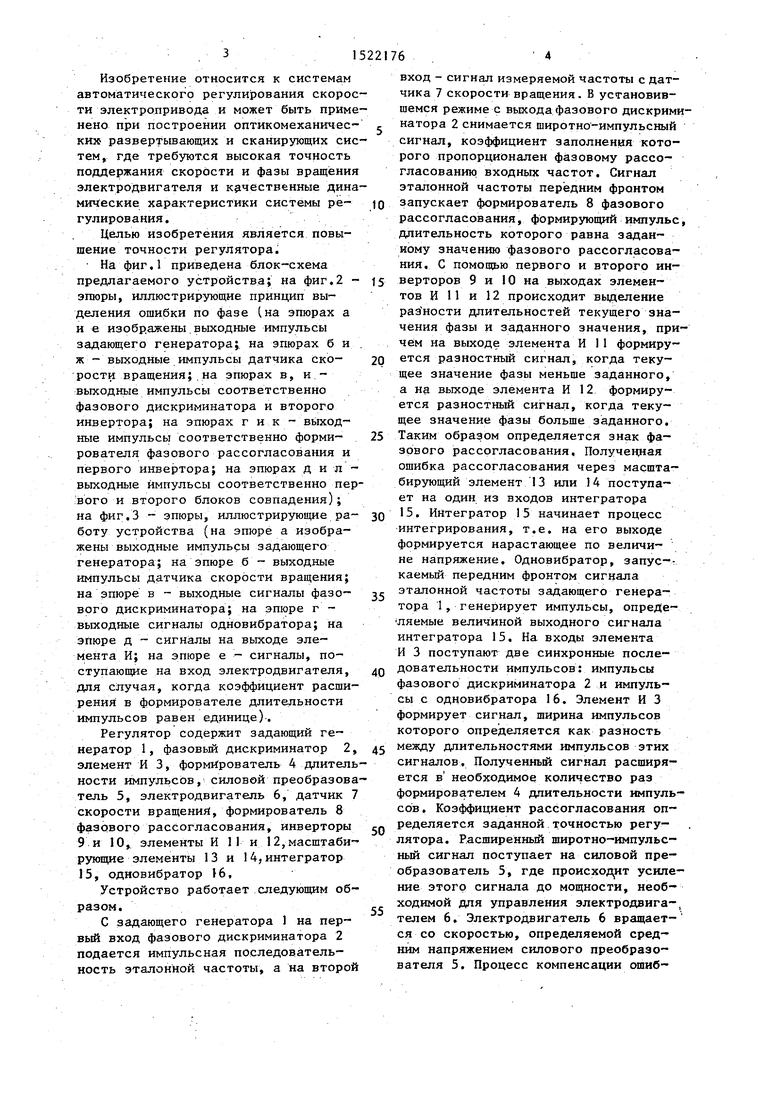
| название | год | авторы | номер документа |
|---|---|---|---|
| Дискретный пропорционально-интегральный регулятор | 1981 |
|
SU1001027A1 |
| Электропривод постоянного тока | 1987 |
|
SU1515311A1 |
| Электропривод | 1988 |
|
SU1656652A1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2485665C1 |
| Синхронно-синфазный электропривод | 1987 |
|
SU1501240A1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2422978C1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2467465C1 |
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей постоянного тока | 1983 |
|
SU1100700A1 |
| КОДИРУЮЩИЙ ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ СКАНИРУЮЩЕГО ЛУЧА В СИСТЕМЕ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА | 1997 |
|
RU2117901C1 |
| Устройство для управления статическим преобразователем частоты | 1982 |
|
SU1125731A1 |
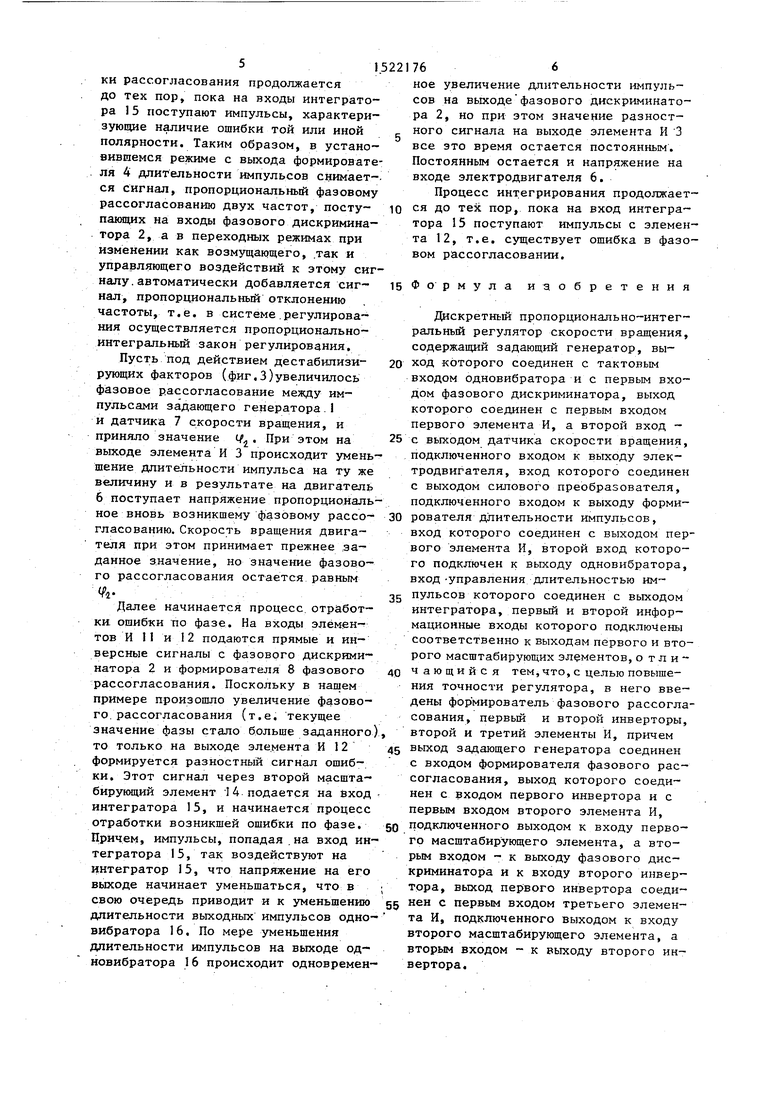
Изобретение относится к системам автоматического регулирования скорости электропривода и может быть использовано для построения высокоточных систем. Цель изобретения - повышение точности. Регулятор содержит задающий генератор 1, фазовый дискриминатор 2, элементы И3, формирователь длительности импульсов 4, силовой преобразователь 5, электродвигатель 6, датчик скорости вращения 7, формирователь фазового рассогласования 8, инверторы 9,10, масштабирующие элементы 13, 14, интегратор 15, одновибратор 16. Цель достигается за счет формирования формирователем фазового рассогласования 8 необходимого значения фазового рассогласования заданной длительности, выделения ошибки в рассогласовании заданного значения фазы и текущего значения с учетом знака и подачи полученного рассогласования через масштабирующие элементы 13,14, интегратор 15 и одновибратор 16 на элемент И, на котором происходит формирование импульсов такой длительности, что при подаче этих импульсов через формирователь длительности импульсов и силовой преобразователь на электродвигатель последний, компенсируя возникшую ошибку рассогласования, устанавливает значение фазы, равное заданному значению. 3 ил.
Физ.1
Изобретение относится к системам автоматического регули:рования скорости электропривода и может быть применено при построении оптикомеханичес- ки разверуьшающих и сканирующих систем, где требуются высокая точность поддержания скорости и фазы вращения электродвигателя и качественные динамические характеристики системы регулирования.
Целью изобретения является повышение точности регулятора.
На фиг.1 приведена блок-схема предлагаемого устройства; на фиг.2 - эпюры, иллюстрирующие принцип выделения ошибки по фазе (на эпюрах а и е изображены.выходные импульсы задающего генератора;, на эпюрах б и . ж - выходные импульсы датчика скорости вращения; .на эпюрах в, и.- выходные импульсы соответственно фазового дискриминатора и второго инвертора; на эпюрах гик - вьпсод- ные импульсы соответственно формирователя фазового рассогласования и первого инвертора; на эпюрах д и л - выходные импульсы соответственно перового и второго блоков совпадения); на фиг.З - эпюры, иллюстрирующие работу устройства (на эпюре а изображены выходные импульсы задающего генератора; на эпюре б - выходные импульсы датчика скорости вращения; на эпюре в - выходные сигналы фазового дискриминатора; на эпюре г - выходные сигналы одновибратора; на эпюре д - сигналы на выходе элемента И; на эпюре е - сигналы, поступающие на вход электродвигателя, для случая, когда коэффициент расширения в формирователе длительности импульсов равен ед.инице).
Регулятор содержит задающий генератор 1 , фазовьй дискриминатор 2, элемент И 3, форми рователь 4 длительности импульсов, силовой преобразователь 5, электродвигатель 6, датчик 7 скорости вращений, формирователь 8 фазового рассогласования, инверторы 9 и 10, элементы И 11 и 12,масштабирующие элементы 13 и 14,интегратор 15, одновибратор }6,
Устройство работает следующим образом.
С задающего генератора 1 на первый вход фазового дискриминатора 2 подается импульсная последовательность эталонной частоты, а на второй
вход - сигнал измеряемой частоты с датчика 7 скорости вращения. В установившемся режиме с вькода фазового дискрими- натора 2 снимается широтно-импульсный сигнал, коэффициент заполнения которого пропорционален фазовому рассогласованию входных частот. Сигнал эталонной частоты пер едним фронтом
o запускает формирователь 8 фазового рассогласования, формирующий импульс, длительность которого равна заданному значению фазового рассогласования. С помощью первого и второго ни-
5 верторов 9 и 10 на выходах элементов И 11 и 12 происходит выделение раз ности длительностей текущего значения фазы и заданного значения, причем на выходе элемента И I1 формиру0 ется разностный сигнал, когда текущее значение фазы меньше заданного, а на выходе элемента И 12 формируется разностный сигнал когда текущее значение фазы больше заданного.
5 Таким образом определяется знак фазового рассогласования, Получещ ая ошибка рассогласования через масштабирующий элемент 13 или 14 поступает на один из входов интегратора
0 15. Интегратор 15 начинает процесс интегрирования, т.е. на его выходе формируется нарастающее по величине напряжение. Одновибратор, запус-- каемьй передним фронтом сигнала
эталонной частоты задающего генератора 1, генерирует импульсы, определяемые величиной выходного сигнала интегратора 15. На входы элемента И 3 поступают две синхронные после-
д довательности импульсов: импульсы фазового дискриминатора 2 и импульсы с одновибратора 16. Элемент И 3 формирует сигнал, ширина импульсов которого определяется как разность
5 между длительностями импульсов этих сигналов. Полученный сигнал расширяется в необходимое количество раз формирователем 4 длительности импульсов. Коэффициент рассогласования определяется заданной.точностью регулятора. Расширенный широтно-импульсный сигнал поступает на силовой преобразователь 5, где происход ст усиление этого сигнала до мощности, необходимой дпя управления электродвига-, телем 6, Электродвигатель 6 вращает- ся со скоростью, определяемой средним напряжением силового преобразователя 5. Процесс компенсации ошиб-
0
5
51
ки рассогласования продолжается до тех пор, пока на входы интегратора 15 поступают импульсы, характеризующие наличие ошибки той или иной полярности. Таким образом, в устано- вившемся режиме с выхода формирователя 4 длительности импульсов С1дамается сигнал, пропорциональный фазовому рассогласованию двух частот, посту- пающих на входы фазового дискриминатора 2, а в переходных режимах при изменении как возмущающего, .так и управляющего воздействий к этому сигналу, автоматически добавляется сиг- нал, пропорциональный отклонению частоты, т.е. в системе.регулирования осуществляется пропорционально- интегральный закон регулирования.
Пусть под действием дестабилизи- рующих факторов (фиг.3)увеличилось фазовое рассогласование между импульсами задающего генератора.I и датчика 7 скорости вращения, и приняло значение с/. При этом на выходе элемента И 3 происходит уменьшение длительности импульса на ту же величину и в результате на двигатель 6 поступает напряжение пропорциональное вновь возникшему фазовому рассо- гласованию. Скорость вращения двигателя при этом принимает прежнее заданное значение, но значение фазового рассогласования остается равным
fг . ,
Далее начинается процесс, отработки ошибки по фазе. На входы элёмен- тов И 11 и 12 подаются прямые и инверсные сигналы с фазового дискриминатора 2 и формирователя 8 фазового рассогласования. Поскольку в нашем примере произошло увеличение фазового, рассогласования (т.е. текущее значение фазы стало больше заданного то только на выходе элемента И 12 формируется разностный сигнал ошибки. Этот сигнал через второй масштабирующий элемент 14 подается на вход интегратора 15, и начинается процесс отработки возникшей ошибки по фазе. Причем, импульсы, попадая . на вход интегратора 15, так воздействуют на интегратор 15, что напряжение на его вькоде начинает уменьшаться, что в свою очередь приводит и к уменьшению длительности выходных импульсов одно вибратора 16. По мере уменьшения длительности импульсов на выходе од- новибратора 16 происходит одновремен766
ное увеличение длительности импупъ- сов на выходе фазового дискриминатора 2, но при этом значение разностного сигнала на выходе элемента И 3 все это время остается постоянным. Постоянным остается и напряжение на входе электродвигателя 6.
Процесс интегрирования продолжается до тех пор, пока на вход интегратора 15 поступают импульсы с элемента 12, т.е. существует ошибка в фазовом рассогласовании.
Формула изобретения
Дискретный пропорционально-интегральный регулятор скорости вращения, содержащий задающий генератор, выход которого соединен с тактовым входом одновибратора и с первым входом фазового дискриминатора, выход которого соединен с первым входом первого элемента И, а второй вход - с выходом датчика скорости вращения, подключенного входом к выходу электродвигателя, вход которого соединен с ВЕ)1Ходом силового преобразователя, подключенного входом к выходу формирователя длительности импульсов, вход которого соединен с выходом первого элемента И, второй вход которого подключен к выходу одновибратора, вход -управления длительностью импульсов которого соединен с выходом интегратора, первый и второй информационные входы которого подключены соответственно к выходам первого и второго масштабирующих элементов, отличающийся тем, что, с целью повышения точности регулятора, в него введены формирователь фазового рассогласования, первый и второй инверторы, второй и третий элементы И, причем выход задающего генератора соединен с входом формирователя фазового рассогласования, выход которого соединен с входом первого инвертора и с первым входом второго элемента И, подключенного выходом к входу первого масштабирующего элемента, а вторым входом - к выходу фазового дискриминатора и к входу второго инвертора, выход первого инвертора соединен с первым входом третьего элемента И, подключенного выходом к входу второго масштабирующего элемента, а вторым входом - к выходу второго инвертора.
| Прибор для сигнализирования об уровне жидкости в скважине | 1936 |
|
SU48021A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Дискретный пропорционально-интегральный регулятор | 1981 |
|
SU1001027A1 |
