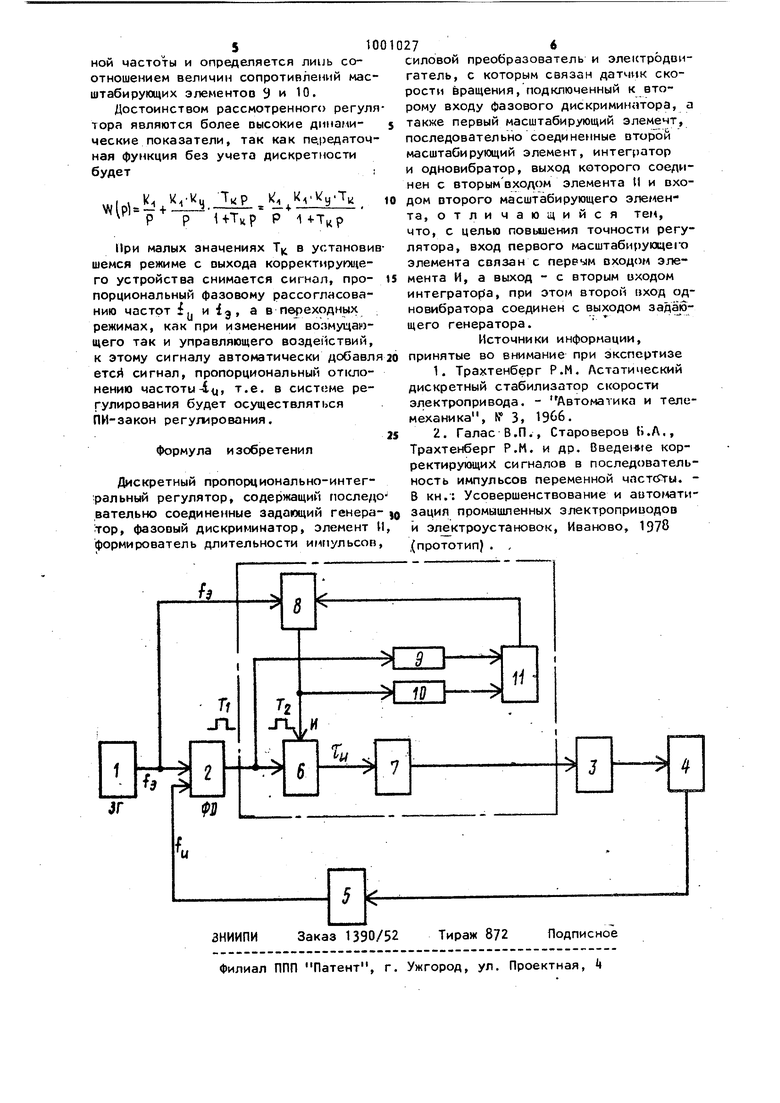
3 . . R и R величины сопротивлёни11 насштабиоуюших элементов, частотипй диапазон расширяется и достигает J2 Недостатком регулятора яоЛяк)тся его плохие динамические характеристики. Указанное устройство дополнительно осуществляет введение п закон регулирования сигнала по персом производной от скорости СО , так как передаточная функция регулятора будет i кР ST;V-Из выра жения (1) видно, что для получения необходимого корректируюuiero сигнала по отклонению скорости Л GO необходимо увеличивать постоянную времени интегратора Т|, что при водит к затягиванию переходныхпроцессов при изме 1ении эталонной частотьк При уменьшении величины TL, регулятор ведет себя в большой степени как дифференцирующее звено, что ухудшает устойчивость системы регули рования. Цель изобретения - повышение точности регулятора Указанная цель достигается тем, что в дискретном пропорционально-интегральном регуляторе, содержащем по .следовательно соединенные задающий генератор, фазовый дискриминатор, эл мент И, формирователь длительности импульсов, силовой преобразователь и электродвигатель, с которым датчик скорости вращения, подключенный К второму входу фазового дискри минатора, а также первый мactJтaбиpy э щий элемент и последовательно соединенные второй масштабирующий элемент интегратор и одновибратор, выход которого соединен с вторым входом элемента И и входом второго масштабирующего элемента, вход первого . масштабирующего элемента связан о пс вым входом элемента И, а выход - с вторым входом интегратора, при этом второй вход одновибратора соединен с выходом задающего генератора. На чертеже представлена блок-схем предлагаемого регулятора. Дискретный пропорционально-интегральный регулятор содержит задающий генератор 1, фазовый дискриминатор 2 силовой преобразователь 3, электродвигатель k, датчик 5 скорости враце ния (частотный) и устройство коррекции, включающее элемент И 6, формиро 274 ватель 7 длительностиимпульсоц, одновибратор 8, масшатбирующие ;)леменТЫ.9 и 10, интегратор 11. , На первый вход фазового дискримина торь 2 подается сигнал измеряемой час тоты1ц с датчика 5f а на второй вход - сигнал эталонной частоты с задающего генератора 1. С выхода фазового дискриминатора 2 снимается широтно-импульсный сигнал, коэффициент заполнения у которого пропорционален фазовому рассогласованию часСигнал эталонной чпстоты 1э передним фронтом запускает одновибратор 8, у которого длительность генерируемых импульсов определяется величиной выходного сигнала интегратора 11, На вход интегратора 11 подаются широтно-импульсные сигналы, с выхода фазового дискриминатора 2 и сигналы с управляемого по длительности одновибратора 8 через различные ло величине сопротивления Rд и R-i, масштабирующих элементов 9 и 10. С элемента И 6 будет сниг аться сигнал, ширина импульсов которого определяется как разность между длительностями и 1пульсов с фазового дискриминатора 2 и выходных импульсов Тя с одновибратора 8, Этот сигнал расширяется в раз формирователем 7 длительности импульсов. Расширенный скорректированный широтно-импульсный сигнал поступает на силовой преобразователь 3. Электродвигатель вращается со скорост.ью, определяемой средним напряжением силового преобразователя 3. Для установившегося режима справедливо выражение .. Ч Н Длительность импульсов выходного сигнала элемента 6 в установившемся режиме будет (1-Й-) Т - Т2 Т Учитывая, что 1 Т, где Т период эталонной частоты с задающего генератора 1, и обозначив К. 1- , для выбора величины коэффициенкта расширения Ки можно записать Кц К, откуда имеем К ,., тгJ к. Из этой формулы видно, что в предлагаемом устройстве коэффициент расширения Ку не зависит от периода входНОИ частоты и определяется лииь соотношением величин сопротивлений мас штабирующих элементов У и 10. Достоинством рассмотренного регул тора являются более высокие динамические показатели, так как передаточ ная функция без учета дискретности будет ,1рьЛч-1:Ь.-1лр. .. Р Р Р И-Тцр При малых значениях Т в установи шемся режиме с выхода корректиругацего устройства снимается сигнал, пропорциональный фазовому рассогласованию частот и ig, а в пе реходных режимах, как при изменении возмущающего так и управляющего воздействий, к этому сигналу автоматически добавл етсй сигнал, пропорциональный отклонению частоты- 4, т.е. в системе регулирования будет осуществляться пи-закон регулирования. Формула изобретения Дискретный пропорционально-интегральный регулятор, содержащий послед вательно соединенные задающий генера тор, фазовый дискриминатор, элемент формирователь длительности импульсоЕ силовой преобразователь и электродвигатель, с которым связан датчик скорости бращения, подключенный к второму входу фазового дискриминатора, о также первый масштабирующий элемент, последовательно соединенные второй масштабирующий элемент, интегратор и одновибратор, выход которого соединен с вторым входом элемента И и входом второго масштабирующего элемента, отли чающийся тем, что, с целью повышения точности регулятора, вход первого лacштaбиpyючelo элемента связан с первым входом элемента И, а выход - с вторым входом интегратора, при этом второй «ход одновибратора соединен с выходом задающего генератора. Источники информации, принятые во внимание при экспертизе 1.Трахтенберг P.M. Астатический дискретный стабилизатор скорости электропривода. - Автоматика и телемеханика, vf 3, 1966. 2.Галас В.П., Староверов Ь.А., Трахтенберг P.M. и др. Введе1 те корректирующих сигналов в последовательность импульсов переменной чпстсРгы. В кн.: Усовершенствование и авто «тизация промышленных электроприоодоо и эле ктроустановок, Иваново, 1978 (прототип). ,
| название | год | авторы | номер документа |
|---|---|---|---|
| Дискретный пропорционально-интегральный регулятор скорости вращения | 1988 |
|
SU1522176A1 |
| ЭЛЕКТРОПРИВОД | 1997 |
|
RU2130688C1 |
| Электропривод | 1983 |
|
SU1107241A1 |
| Устройство для регулирования скорости электродвигателя постоянного тока | 1981 |
|
SU957400A1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2310971C1 |
| Устройство для регулирования скорости вращения электродвигателя | 1981 |
|
SU955471A1 |
| Электропривод постоянного тока | 1991 |
|
SU1786630A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1996 |
|
RU2138903C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2003 |
|
RU2258297C2 |
| Электропривод постоянного тока | 1985 |
|
SU1272452A1 |
