Изобретение относится к области строительных и горных мащин ударного действия и может быть использовано при создании пневматических молотков, а также мощных пневмоударных машин для разрушения скальных и мерзлых грунтов.
Цель изобретения - повышение эффективности работы и снижение расхода энергоносителя. .
На чертеже изображена схема ударного механизма.
Механизм содержит силовой цилиндр 1 с ударником 2. Ударник 2 разделяет цилиндр 1 на камеры рабочего хо- да 3 и холостого хода 4, в нижней части которой размещен хвостовик рабочего инструмента 5. Механизм распределения состоит из четырех двухпозиционных трехлинейных распределителей 6-9, управляющих впуском и выпуском энергоносителя в рабочие полости механизма, а блок управления (показан пунктирной линией) включает блок логических операторов 10-15 и два двухпозиционных двухлинейных распределителя 16 и 17, управляющие каналы 18-29 для подачи входных сигналов в блок управления и управ- каналы 30-39 для подачи выходных сигналов,, обеспечивающих перемещение распределителей 6-9 и переключение распределителей 16 и 17. Энергоноситель к механизму подводится через энергоподводящие каналы .40 и 41 и далее через распределители по энергоподводящим каналам 42
5
0
и 43 отводится в атмосферу через каналы 44 и 45, а каналы 46-56 связаны с источником энергоносителя и атмосферой. Управляющие- каналы 47, 49, 51, 52, 55 и 57 механизма управления цодключаются к основному или специальному источнику энергоносителя, каналы 46, 48, 50, 53,54 и 56 связаны с атмосферой. Двухпозицион- ные двухлинейные распределители 16 и 17 имеют соответственно полости 58, 59; и 60, 61 управления, а двух- позиционные трехлинейные распреде5 .лители 6-9 имеют соответственно полости 62-69 управления. I
Камера 4 холостого хода через первый 6 и второй 7 распределители
Q периодически связана с энергоподводящим каналом 40 и каналом 45 с ат- мос4)ерой. Камера 3 рабочего хода че- третий 8 и четвертьш 9 распределители периодически связана с энерс гоподводящим каналом 41 и каналом i 44 с атмосферой. Полости 58 и 59 управления первого двухпозиционного двухлинейного распределителя 16 периодически связаны с управляющими каналами 47 и 51 через первый 6 и третий 8 распределители, а полости 60 и 61 управления второго двухпо- зиционного двзгхлинейного распределителя 17 периодически связаны с управляющими каналами 51 и 52, 47 и 55 через блок логических операторов. Посредством первого 16 и второго 17 двухлинейных двухпозиционных распре- де|1ителей блок логических операторов
0
5
10-15 периодически связан с управля ющими каналами 55 и 57, а посредством каналов 54 и 56 - с атмосферой. Полости 62-69 управления двухпозици- онных трехлинейь ьж распределителей 6-9 связаны с управляющими каналами 47, 49, 51 и 52 через блок логических операторов. Камеры холостого хода 4 и рабочего хода 3 связаны соответственно посредством каналов 70 и 71 обратной связи с полостями 64 и 69 управления второго 7 и четвертого 9 распределителей.
Ударный механизм работает следую- 1ЦИМ образом.
В начале цикла ударник 2 находится в нижнем положении и опирается на хвостовик инструмента 5. По каналам 21 и 27 в оператор 12 подаются входные сигналы, приводящие к появлению управляющего сигнала в канале 30, Под действием управляющего сигнала распределитель 6 занимает позицию, при которой энергоноситель через каналы 40 .и 42 подается в камеру 4 холостого хода, и ударник 2 перемещается вверх. Цри этом воздух из камеры 3 вытесняется в атмосферу по каналу 44 через распределитель 9. После переброски распределителя 6 появляется входной сигнал в канале 18, под действием которого включается распределитель 16. Сигнал от него но канал:у 31 подается в распределитель 6, которьш отключает каме- ру 4 холостого хода от сети энергоносителя. Далее в ней происходит процесс расгиирения, Сигнал в канале 19 подается в оператор 10 и совмест- но с сигналами от распределителя 16 воспроизводит управляющий сигнал в канале 38, с помощью которого включается распределитель 17,, сигнал от которого поступает в регулируемую
10
нал в канале 25 подается на оператор 13, управляющий сигнал которого, переданный по каналу 34, подклю чает канал 41 к каналу 43, соединен ному с камерой рабочего хода. К это му моменту ударник 2 находится в верхнем положении. Под действием сж того воздуха ударник начинает ускоренно перемещаться вниз. Входной си нал от распределителя 8 по каналам 51 и 22 отключает распределитель 16 Управляюш 1й сигнал отключенного состояния по каналу 35 осуществляет
г переброску распределителя 8 в исход ное положение, отключая камеру 3 ра бочего хода от сети. Ударник продол жает движение в сторону хвостовика рабочего инструмента 5,в камере 3 про
2Q исходит процесс расширения сжатого воздуха.Сформированный в операторе 1 сигнал канала 39 отключает распределитель 17,а сигнал отключенного со с тояния по каналу 36 подается в регули25 РУемую полость 69 распределителя 9, переброска которого происходит после открытия верхней кромкой ударника канала 71. В камере 3 рабочего хода ударного механизма происходит процесс отвода отработанного воздуха в атмосферу. Продолжая рабочее движе ние, ударник наносит удар по хвосто вику 5 инструмента, а управляющий сигнал канала 33, сформЕ р о ванный в операторе 14, осуществляет пере-
35 броску распределителя 7 в отключенное положение. С этого момента описанный рабочий процесс ударного механизма периодически повторяется.
Выполнение ударного механизма с блоком логических операторов в сист ме управления позволяет реализовать в машине экономические циклы с уча- стками расширения, свести до миниму ма импульсы противодавления на от30
40
KUiupoj. и iioc ryiiaei в рех улируемую «с
,-, т тп 43 дельных фазах движения ударника
полость 64 распределителя 7. Регули-н м J-M
,,и устранить выброс сетевого воздуха
руемая по объему полость 64 распрев атмосферу, имеющий место в клапанных и золотниковых воздухораспределительных устройствах. 50 Формула изобретени
делителя позволяет осуществить перекидку распределителя в момент, когда нижняя кромка ударника откроет канал 70 и в камере 4 х олостого хода произойдет вьклоп отработанного воздуха. Под действием сигналов в каналах 20 и 28 в операторе 15 формируется упра1зляющий сигнал канала 37, под действием которого происходит перекидка распределителя 9 и отключение камеры 3 рабочего хода от выхлопного канала. Появившийся сиг-
0
нал в канале 25 подается на оператор 13, управляющий сигнал которого, переданный по каналу 34, подключает канал 41 к каналу 43, соединенному с камерой рабочего хода. К этому моменту ударник 2 находится в верхнем положении. Под действием сжа того воздуха ударник начинает ускоренно перемещаться вниз. Входной сигнал от распределителя 8 по каналам . 51 и 22 отключает распределитель 16. Управляюш 1й сигнал отключенного состояния по каналу 35 осуществляет
г переброску распределителя 8 в исходное положение, отключая камеру 3 рабочего хода от сети. Ударник продолжает движение в сторону хвостовика рабочего инструмента 5,в камере 3 проQ исходит процесс расширения сжатого воздуха.Сформированный в операторе 11 сигнал канала 39 отключает распределитель 17,а сигнал отключенного со с- тояния по каналу 36 подается в регули5 РУемую полость 69 распределителя 9, переброска которого происходит после открытия верхней кромкой ударника канала 71. В камере 3 рабочего хода ударного механизма происходит процесс отвода отработанного воздуха в атмосферу. Продолжая рабочее движение, ударник наносит удар по хвостовику 5 инструмента, а управляющий сигнал канала 33, сформЕ р о ванный в операторе 14, осуществляет пере-
5 броску распределителя 7 в отключенное положение. С этого момента описанный рабочий процесс ударного механизма периодически повторяется.
Выполнение ударного механизма с блоком логических операторов в системе управления позволяет реализовать в машине экономические циклы с уча- стками расширения, свести до минимума импульсы противодавления на от0
0
с
в атмосферу, имеющий место в клапанных и золотниковых воздухораспределительных устройствах. 0 Формула изобретения
Ударный механизм, включающий си- ловой цилиндр, размещенный в нем ударник, который делит полость цилиндра на камеры рабочего и холостого хода, блок управления и механизм распределения энергоносителя, связанные энергоподводящими и управляющими каналами с источником давле
ния, камерами холостого и рабочего хода и атмосферой, рабочий инструмент, отличающийся тем, что, с целью повышения эффективности работы и снижения расхода энергоносителя, блок управления .вьшол- нен в виде блока логических операторов и двух двухпозиционных двух- линейных распределителей с полостями управления, а механизм распределения энергоносителя выполнен в виде четырех двухпозиционных трехлинейных распределителей с полостями управления, при этом камера холосто- 1ГО хода через первый и второй двух- позиционные трехлинейные распределители периодически связана с энергоподводящим каналом и атмосферой, а камера рабочего хода соответственно через третий и четв ертый двухпозици- онные трехлинейные распределители периодически связана с энергоподво- дящими каналами и атмосферой, при этом полости управления первого двух
0
5
5
0
позиционного двухлинейного распределителя периодически связаны с управляющими каналами посредством первого и третьего двухпозиционных трехлинейных распределителей, а полости управления второго двухпозиционного двухлинейного распределителя связаны периодически с управляющими каналами через блок логических операторов, причем посредством первого и второго двухлинейных двухпозиционных распределителей блок логических операторов периодически связан с энергоподводящими и управляющими каналами и с атмосферой, а полости управления двухпозиционных трехлинейных распределителей связаны с управляющими каналами через блок логических операторов, причем камеры холостого и рабочего хода связаны соответственно посредством каналов обратной связи с полостями управления второго и четвертого двухпозиционных трехлинейных распределителей.
| название | год | авторы | номер документа |
|---|---|---|---|
| УДАРНЫЙ МЕХАНИЗМ | 2005 |
|
RU2286226C2 |
| ПОГРУЖНАЯ УДАРНАЯ МАШИНА ДЛЯ БУРЕНИЯ СКВАЖИН КОЛЬЦЕВЫМ ЗАБОЕМ | 1996 |
|
RU2109124C1 |
| Устройство управления предохранительным тормозом подъемной машины | 1982 |
|
SU1115988A2 |
| Система управления ударным механизмом | 1979 |
|
SU850370A1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД | 2000 |
|
RU2241867C2 |
| Пневматический цифровой привод | 1989 |
|
SU1665115A1 |
| Пневматический ударный механизм | 1978 |
|
SU789271A1 |
| ПОГРУЖНАЯ УДАРНАЯ МАШИНА ДЛЯ БУРЕНИЯ СКВАЖИН КОЛЬЦЕВЫМ ЗАБОЕМ | 1999 |
|
RU2166055C1 |
| Пневматическая машина ударного действия | 1988 |
|
SU1648752A1 |
| КОЛЬЦЕВОЙ ПНЕВМОУДАРНИК | 1990 |
|
RU2017954C1 |
Изобретение относится к строительным и горным машинам ударного действия, предназначенным для разрушения скальных и мерзлых грунтов. Цель - повышение эффективности работы механизма и снижение расхода энергоносителя (ЭН). Ударный механизм содержит силовой цилиндр 1, блок управления и механизм распределения ЭН. Полость силового цилиндра 1 разделена размещенным в ней ударником 2 на камеры рабочего 3 и холостого 4 хода. В нижней части камеры 4 размещен хвостовик рабочего инструмента 5. При этом блок управления выполнен в виде блока логических операторов 10 - 15 и двухпозиционных двухлинейных распредилителей (Р) 16, 17 с полостями управления 58, 59 и 60, 61, а механизм распределения - в виде двухпозиционных трехлинейных Р 6 - 9 с полостями управления 62 - 69. Входные сигналы в блок управления подаются через управляющие каналы 18 - 29, а обеспечивающие перемещение Р 6 - 9 и переключение Р 16 и 17 выходные сигналы поступают через управляющие каналы 30 - 39. К механизму распределения ЭН подводится через энергоподводящие каналы 40, 41 и далее через Р по энергоподводящим каналам 42, 43 отводится в атмосферу через каналы 44, 45, а каналы 46 - 56 связаны с источником ЭН и атмосферой. Логические операторы 10 - 15 реализуют функцию включения, обеспечивающую работу машины в оптимальном по расходу воздуха режиме. При этом сводятся до минимума импульсы противодавления на отдельных фазах движения ударника 2. 1 ил.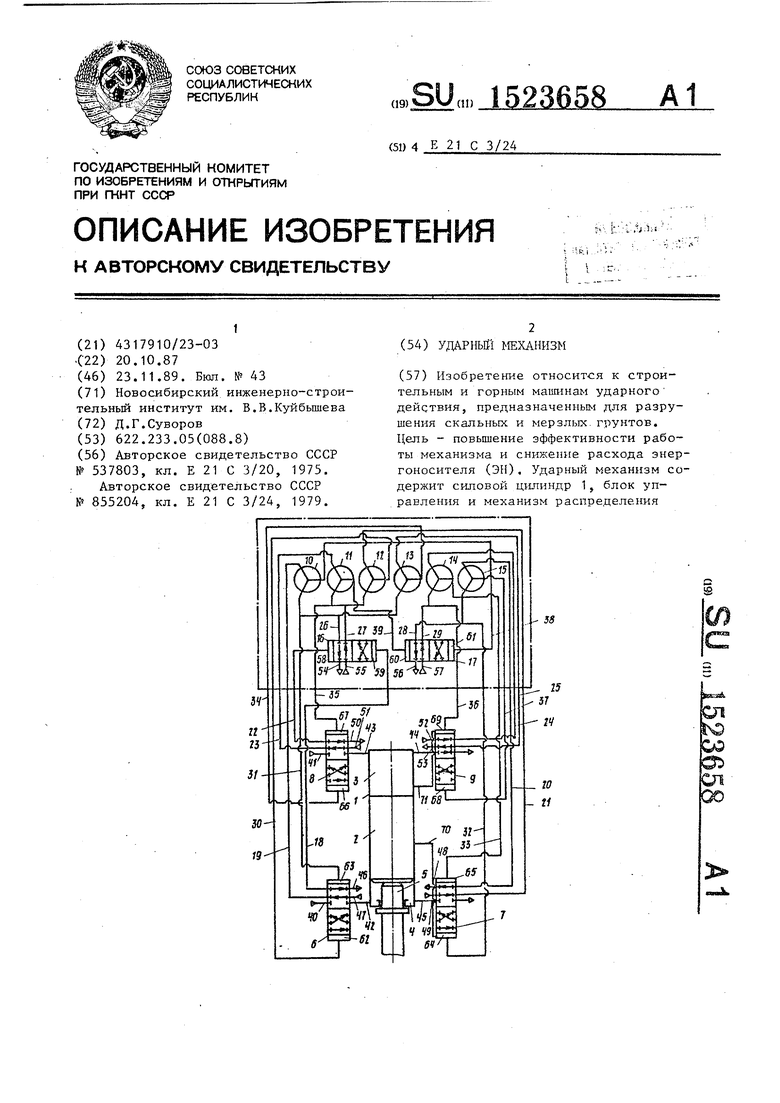
| Гидравлический ударный механизм | 1975 |
|
SU537803A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Ударный механизм | 1979 |
|
SU855204A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
