Изобретение относится к пневмоавтоматике и может быть использовано в конструкциях приводов автооператоров, станков и промышленных роботов.
Известен пневматический привод (Герц Е.В. Пневматические приводы. Теория и расчет. - М.: “Машиностроение”, 1969, стр. 254, рис.102-г), содержащий силовой пневмоцилиндр, двухпозиционный управляющий воздухораспределитель, выхлопной канал которого через дроссель соединен с атмосферой (сливом).
Недостатком данного привода являются низкое быстродействие (из-за передросселирования) и ударный останов в конце хода (приводящий к износу, уменьшению ресурса) в тех случаях, когда привод перемещает массы, которые в разных тактах работы технологической машины имеют разную величину, т.е. привод, настроенный дросселем на нормальную работу при одной массе, неудовлетворительно работает при большей или меньшей массе нагрузки.
Известен пневматический привод (Сырицын Т.А., Бельферман В.М. Дискретно-аналоговое регулирование систем пневмоприводов с применением микропроцессорных контроллеров // Методы расчета и проектирования гидропнев-моприводов: Сб. научн. тр. / МАДИ. - 1988. - С.89-95), содержащий силовой пневмоцилиндр, воздухораспределители и набор подключаемых по желаемой программе дросселей в выхлопном канале.
Недостатком данного привода являются низкое быстродействие и ударный останов привода в конце хода в тех случаях, когда неизвестна очередность поступления различных заготовок (деталей) и неизвестна их масса, т.е. когда среда недетерминированная. Такой привод не обладает возможностью самонастраивания (адаптации) к различным массам нагрузки, поступающей на привод в произвольном порядке. Кроме того, из-за облитерации дросселей возникает проблема их взаимного согласования при вынужденных дополнительных регулировках с целью компенсации явления заращивания (облитерации).
Из известных устройств наиболее близким по совокупности признаков является пневматический привод (Герц Е.В. Пневматические приводы. Теория и расчет. - М.: “Машиностроение”, 1969, стр. 254, рис.102-г) [3], содержащий силовой пневмоцилиндр, двухпозиционный четырехлинейный управляющий воздухораспределитель, выхлопной канал которого сообщается с пневмоемкостью и через дроссель с атмосферой.
Недостатком такого привода являются также низкое быстродействие и ударный останов при работе с различными массами нагрузки и особенно в тех случаях, когда очередность поступления заготовок разной массы неизвестна, и в тех случаях, когда неизвестна и масса заготовок (среда недетерминированная).
Задачей изобретения является создание пневматического привода с повышенным быстродействием, безударным остановом в конце хода при значительном изменении диапазона перемещаемых масс, увеличении ресурса и пожаровзрывобезопасности.
Сущность изобретения заключается в том, что в пневматическом приводе, содержащем силовой пневмоцилиндр, двухпозиционный четырехлинейный управляющий воздухораспределитель, выхлопной канал которого соединяется через дроссель с атмосферой, к выхлопному каналу через двухпозиционные двухлинейные распределители дополнительно подключен набор регулируемых пневмоемкостей. Привод дополнительно содержит программный (пневматический) блок, связанный с управляющими входами распределителей, рабочее (исходное) место заготовок (деталей), с которыми оперирует привод (технологической или транспортной машины), рабочее место (магазина, конвейера и т.д.) заготовок снабжено преобразователем типа масса - код, состоящим из устройства взвешивания (весов), преобразователя типа аналого-цифровой двоичный код, выполненного в виде группы (гребенки) дающих (питающих) сопел и соосной с ней группы (гребенки) приемных сопел, между которыми установлен с возможностью перемещения связанный с подвижной частью весов входной элемент в виде заслонки (шторки), на которой нанесена кодовая маска, например, в виде кода Грея, а выходы преобразователя соединены с входами логических модулей, состоящих из цепочки логических элементов в виде триггера (памяти) с раздельными входами и элементов, реализующих логические функции ИЛИ, И и выполненных на струйных турбулентных элементах, реализующих функцию НЕ-ИЛИ, а выходы модулей соединены с управляющими входами распределителей, входы - с выходами программного блока.
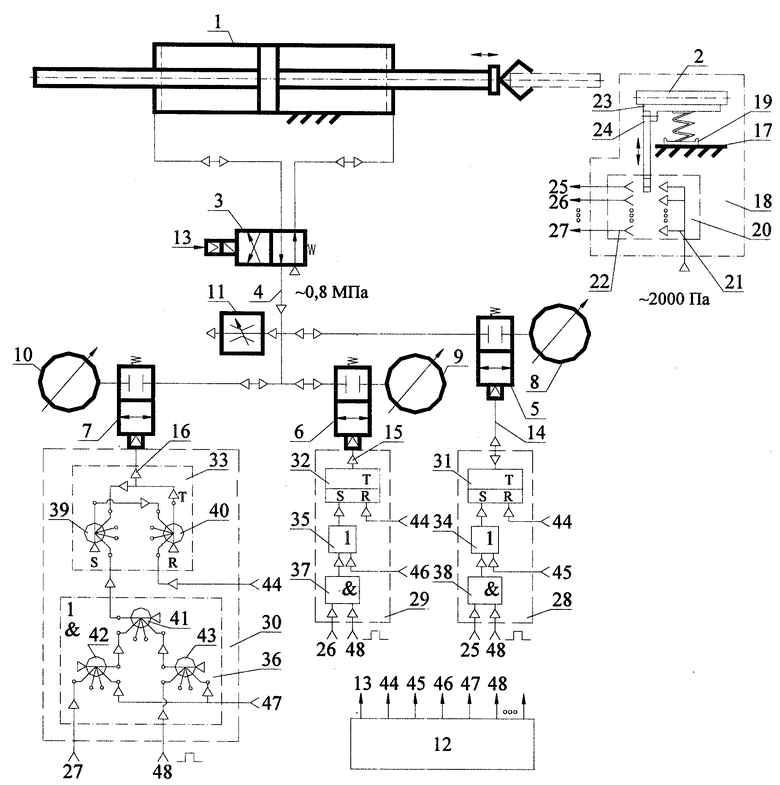
На рисунке изображена принципиальная схема пневматического привода. Привод содержит силовой пневмоцилиндр 1, взаимодействующий с переменной массой (нагрузкой) 2, двухпозиционный четырехлинейный управляющий воздухораспределитель 3, выхлопной канал 4 которого через двухлинейные (или трехлинейные) распределители 5, 6, 7 соединен с набором регулируемых пневмоемкостей 8, 9, 10 и через дроссель 11 с атмосферой, программный (пневматический) блок 12, связанный с управляющими входами 13, 14, 15, 16 распределителей 3, 5, 6, 7, рабочее (исходное) место 17 заготовок (деталей) 2, с которыми оперирует привод (технологической или транспортной машины), снабжено преобразователем типа масса - код 18, состоящим из устройства взвешивания (весов) 19, преобразователя типа аналого-цифровой двоичный код 20, выполненного в виде группы (гребенки) дающих (питающих) сопел 21 и соосной с ней группы (гребенки) приемных сопел 22, между которыми перемещается связанный с подвижной частью весов 23 входной элемент 24 в виде заслонки (шторки), на которой может быть нанесена кодовая маска (система отверстий), к примеру, в виде кода Грея, а выходы 25,26, 27 преобразователя 18, (20) соединены непосредственно или через дешифратор (не показан) кода Грея с входами логических модулей 28, 29, 30, состоящих из цепочки логических элементов в виде триггера (памяти) 31, 32, 33 с раздельными входами (S, R) и элементов, реализующих логические функции ИЛИ, И 34, 35, 36, 37, 38 и выполненных на струйных турбулентных элементах (типа СЛ) 39, 40, 41, 42, 43 (как пример струйные элементы показаны для модуля 30, аналогично и для модулей 28, 29), реализующих (каждый) функцию НЕ-ИЛИ (на четыре управляющих входа) [2], а выходы модулей соединены с управляющими входами 14, 15, 16 распределителей 5, 6, 7, входы - с выходами 44, 45, 46, 47, 48 программного блока 12.
Пневматический привод работает следующим образом. В исходном положении поршень пневмоцилиндра 1 находится в крайнем левом положении, управляющие сигналы 45, 46, 47 с программного блока 12 поданы на входы модулей 28, 29, 30, что вызывает появление сигналов с триггеров 31, 32, 33 на входах 14, 15, 16, пневмоемкости 8, 9, 10 через распределители 5, 6, 7 подключены к выхлопному каналу 4 и через дроссель 11 к атмосфере, сигнал в канале 13 отсутствует. При выдвижении штока цилиндра 1 без груза (вправо) с блока 12 подается сигнал в канал 13, распределитель 3 срабатывает, поршень цилиндра перемещается вправо, воздух из правой (выхлопной) полости цилиндра 1 через канал 4 заполняет емкости 8, 9, 10, в них сжимается и одновременно сбрасывается через дроссель 11 в атмосферу, “пневматическая пружина” емкости - дроссель при этом притормаживает поршень в конце хода, обеспечивая безударный останов.
Перед захватом груза 2 с блока 12 подается сигнал по каналу 44, триггеры (память) переключаются (сброс памяти), емкости 8, 9, 10 отключаются от канала 4. После этого сигнал 44 снимается, и блоком 12 подается импульсный сигнал по каналу 48, при этом сигналы с выходов 25, 26, 27 преобразователя 18 через элементы 36, 37, 38, 34, 35 включают все или некоторые триггеры 31, 32, 33 и подключают те или иные емкости 8, 9, 10 к каналу 4. Затем блоком 12 снимается сигнал 13, распределитель 3 возвращается в исходное состояние, поршень цилиндра 1 перемещается влево, плавно тормозится в конце хода и останавливается. Цикл заканчивается.
При работе с грузами 2 большей массы подвижное звено 23 весов 19 смещается вниз. Вниз (по рисунку) смещается и шторка 24, что приводит к перекрытию подачи сжатого воздуха с сопел 21 к соплам 22 и исчезновению сигналов на выходах 25, 26, 27. Чем больше масса груза 2, тем меньшее число приемных сопел 22 имеет выходной сигнал (давление), т.е. в перекрытых приемных соплах давление будет равно нулю, а это вызовет отключение (тех или иных) емкостей 8, 9, 10 от канала 4, что приведет к увеличению жесткости “пневматической пружины” емкость - дроссель и большей интенсивности торможения более тяжелой массы заготовки 2.
Таким образом, при работе привода с заготовками разной массы осуществляется опережающее перестраивание структуры привода, т.е. его адаптация к изменяющейся внешней среде (нагрузке).
Струйное исполнение преобразователя 20 и пневматической управляющей части повышает пожаровзрывобезопасность привода.
Настройка привода на безударный останов при работе с различными массами осуществляется с помощью дросселя 11 и регулируемых пневмоемкостей 8, 9, 10.
Число N различных масс, на которые может быть настроен привод (с сохранением высоких скоростей и безударного останова) зависит от числа и емкостей в приводе, и если емкости привода (8, 9, 10) по объему относятся друг к другу в двоичном коде (1:2:4), то N=2n. К примеру, если n=10, то N=1024. Практически в приводе достаточно n=5 или 6, чтобы обеспечить качественную работу привода с широким диапазоном перемещаемых масс.
Привод может использоваться и при работе по жесткой программе в тех случаях, когда заранее известны массы заготовок и известна очередность их поступления на привод. Управление в этом случае идет по каналам 13, 44, 45, 46, 47 без преобразователя 18. Общее управление приводом (блоком 12) может осуществляться по времени или по пути с использованием сигналов концевых (путевых) датчиков (на рисунке не показаны) и комбинированно (по пути и по времени).
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный пневматический привод с обратной пневматической связью | 2018 |
|
RU2685167C1 |
| Пневматический цифровой привод | 1989 |
|
SU1665115A1 |
| Устройство для управления пневмоприводом двухстороннего действия | 1990 |
|
SU1742787A1 |
| Струйная позиционная пневматическая система привода длинноходовых установочных координатных перемещений | 2023 |
|
RU2802568C1 |
| Пневмогидравлический робот | 1974 |
|
SU574292A1 |
| Рекуперативный гидропривод лесовозного тягача с полуприцепом | 2019 |
|
RU2726987C1 |
| Пневматическое переносное заворачивающее устройство с автоматической подачей винтов | 1980 |
|
SU921841A1 |
| Цифровой пневмогидравлический привод | 1980 |
|
SU1019118A1 |
| Пневматический весовой дозатор непрерывного действия | 1984 |
|
SU1185104A1 |
| Устройство для отделения заготовок от стопы | 1986 |
|
SU1360862A1 |
Привод предназначен для привода станков и промышленных роботов. Привод содержит силовой пневмоцилиндр, двухпозиционный четырехлинейный управляющий воздухораспределитель, выхлопной канал которого соединяется через дроссель с атмосферой, программный (пневматический) блок, рабочее (исходное) место заготовок (деталей), с которыми оперирует привод (технологической или транспортной машины), при этом выхлопной канал воздухораспределителя через двухпозиционные распределители соединен с набором регулируемых пневмоемкостей, рабочее место (магазина, конвейера и т.д.) заготовок снабжено преобразователем типа масса - код, состоящим из устройства взвешивания (весов) и преобразователя типа аналого-цифровой двоичный код, выполненного в виде группы (гребенки) дающих (питающих) сопел и соосной с ней группы (гребенки) приемных сопел, между которыми установлен с возможностью перемещения связанный с подвижной частью весов входной элемент в виде заслонки (шторки), на которой нанесена кодовая маска, например, в виде кода Грея, а выходы преобразователя соединены с входами логических модулей, состоящих из цепочки логических элементов в виде триггера (памяти) с раздельными входами и элементов, реализующих логические функции ИЛИ, И и выполненных на струйных турбулентных элементах, реализующих функцию НЕ-ИЛИ, а выходы модулей соединены с управляющими входами распределителей, входы - с выходами программного блока. Технический результат - повышение надежности. 1 ил.
Пневматический привод, содержащий силовой пневмоцилиндр, двухпозиционный четырехлинейный управляющий воздухораспределитель, выхлопной канал которого соединяется через дроссель с атмосферой, программный (пневматический) блок, рабочее (исходное) место заготовок (деталей), с которыми оперирует привод (технологической или транспортной машины), отличающийся тем, что выхлопной канал воздухораспределителя через двухпозиционные распределители соединен с набором регулируемых пневмоемкостей, рабочее место (магазина, конвейера и т.д.) заготовок снабжено преобразователем типа масса-код, состоящим из устройства взвешивания (весов) и преобразователя типа аналог-цифровой двоичный код, выполненного в виде группы (гребенки) дающих (питающих) сопел и соосных им группы (гребенки) приемных сопел, между которыми установлен с возможностью перемещения связанный с подвижной частью весов входной элемент в виде заслонки (шторки), на которой нанесена кодовая маска, например, в виде кода Грея, а выходы преобразователя соединены с входами логических модулей, состоящих из цепочки логических элементов в виде триггера (памяти) с раздельными входами и элементов, реализующих логические функции ИЛИ, И и выполненных на струйных турбулентных элементах, реализующих функцию НЕ-ИЛИ, а выходы модулей соединены с управляющими входами распределителей, входы - с выходами программного блока.
| ГЕРЦ Е.В | |||
| Пневматические приводы | |||
| Теория и расчет | |||
| - М.: Машиностроение, 1969, с | |||
| Гонок для ткацкого станка | 1923 |
|
SU254A1 |
| Пневматический привод | 1988 |
|
SU1596142A1 |
| Следящий позиционный пневмопривод | 1987 |
|
SU1465634A1 |
| DE 3345002 А1, 25.07.1985 | |||
| ПОДАЮЩЕЕ УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ РАСПИЛОЧНОЙ МАШИНЫ ДЛЯ РЕЗКИ ТРУБ В СДВОЕННОМ РЕЖИМЕ РЕЗКИ | 2014 |
|
RU2656903C2 |

