ел tc
со ч1
vl
Сл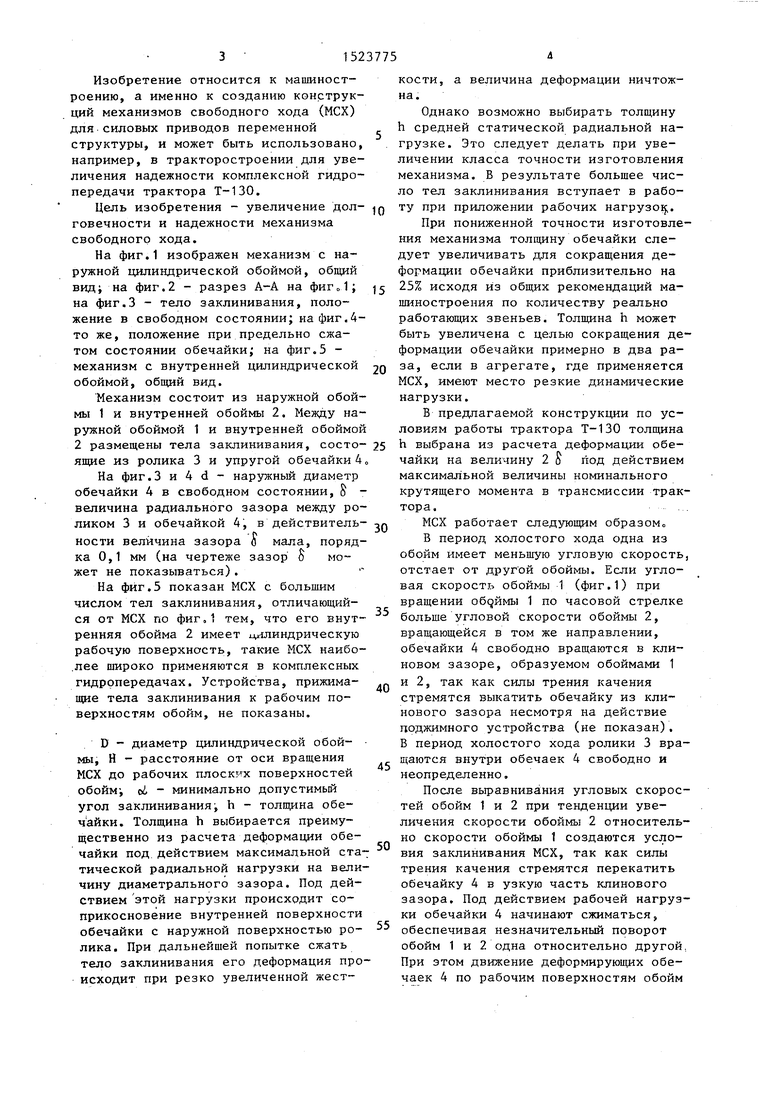
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм свободного хода | 1988 |
|
SU1656233A1 |
| РОЛИКОВАЯ МУФТА СВОБОДНОГО ХОДА | 2002 |
|
RU2224923C2 |
| АВТОМАТИЧЕСКИЙ ПРИВОД | 1994 |
|
RU2082050C1 |
| Способ определения коэффициента трения ролика об обойму механизма свободного хода | 1990 |
|
SU1698711A1 |
| МЕХАНИЗМ СВОБОДНОГО ХОДА | 1972 |
|
SU432310A1 |
| САМОБЛОКИРУЮЩИЙСЯ ДИФФЕРЕНЦИАЛ | 2003 |
|
RU2238459C1 |
| Фрикционное сцепление с электромагнитным управлением | 1986 |
|
SU1368533A1 |
| Муфта свободного хода | 1983 |
|
SU1131570A1 |
| МЕХАНИЗМ СВОБОДНОГО ХОДА | 1991 |
|
RU2013677C1 |
| Внутреннее устройство для сборки под сварку кольцевых стыков обечаек | 1979 |
|
SU919837A1 |
Изобретение относится к машиностроению и может быть использовано, например, в комплексной гидропередаче трактора Т-130. Цель изобретения - повышение надежности и долговечности механизма свободного хода. Механизм содержит наружную 1 и внутреннюю 2 обоймы. Между ними размещены заклинивающие ролики (Р) 3, снабженные упругой обечайкой 4. Зазор δ между обечайкой 4 и Р 3 определяется по определенной зависимости. Снабжение Р 3 обечайкой 4 позволяет большему числу тел заклинивания включиться в работу. Обечайка 4 снижает также резкие динамические нагрузки в механизме. 5 ил.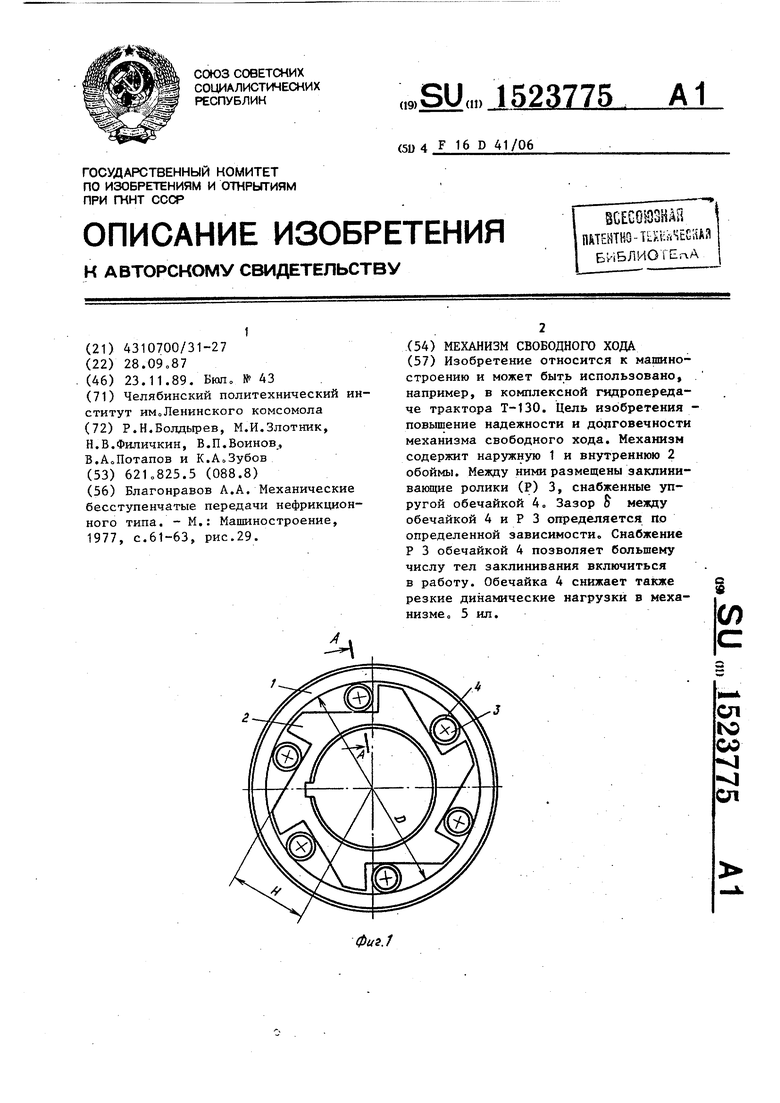
Фиг.1
Изобретение относится к машиностроению, а именно к созданию конструкций механизмов свободного хода (МСХ) для силовых приводов переменной структуры, и может быть использовано, например, в тракторостроении для увеличения надежности комплексной гидропередачи трактора Т-130.
Цель изобретения - увеличение дол- говечности и надежности механизма свободного хода.
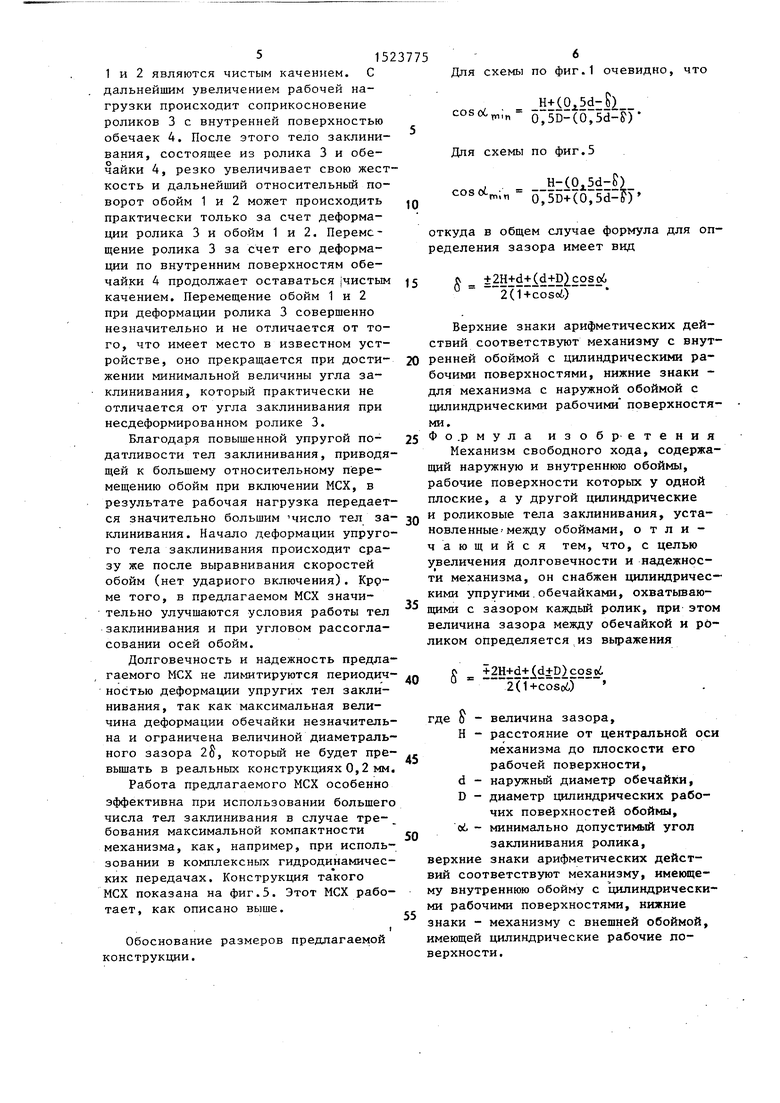
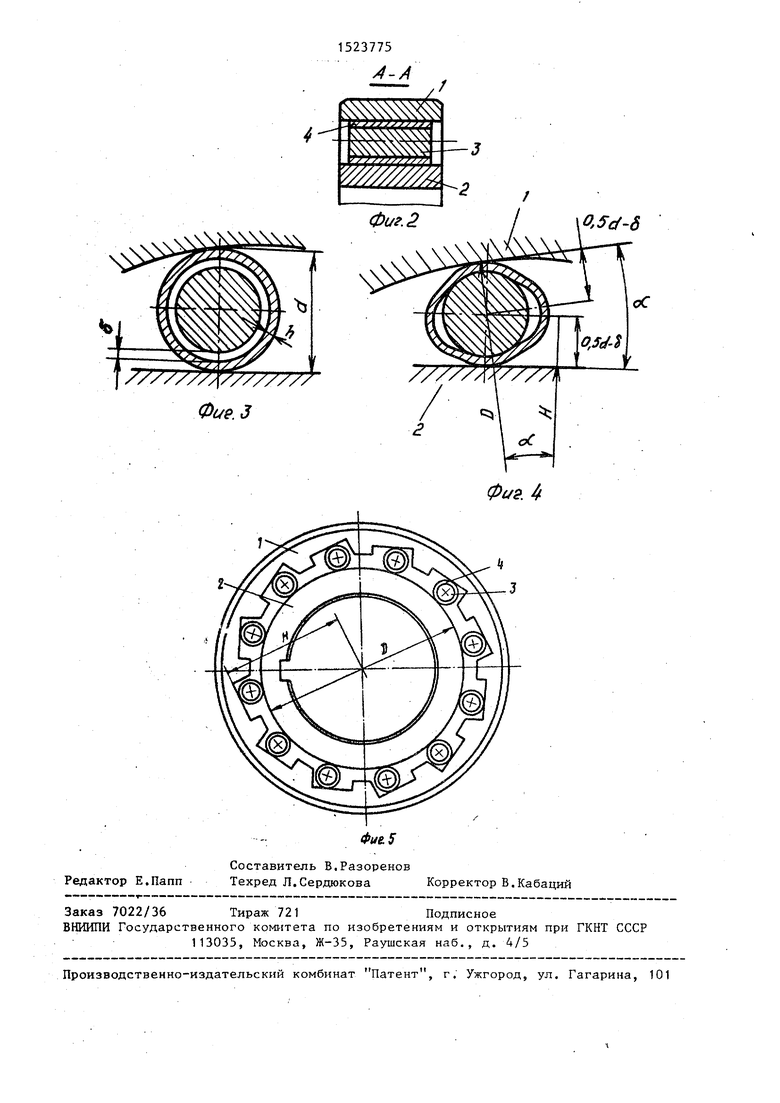
На фиг.1 изображен механизм с наружной цилиндрической обоймой, общий вид; на фиг.2 - разрез А-А на фиг„1; на фиг.З - тело заклинивания, положение в свободном состоянии; на фиг.4- то же, положение при предельно сжатом состоянии обечайки; на фиг.5 - механизм с внутренней цилиндрической обоймой, общий вид.
Механизм состоит из наружной обоймы 1 и внутренней обоймы 2. Между наружной обоймой 1 и внутренней обоймой 2 размещены тела зарслинивания, состо- ящие из ролика 3 и упругой обечайки 4
На фиг.З и 4 d - наружньй диаметр обечайки 4 в свободном состоянии, S - величина радиального зазора между роликом 3 и обечайкой 4, в действитель- ности величина зазора о мала, порядка 0,1 мм (на чертеже зазор S может не показываться).
На фиг.5 показан МСХ с большим числом тел заклинивания, отличающийся от МСХ по фиг,1 тем, что его внутренняя обойма 2 имеет и,илиндрическую рабочую поверхность, такие МСХ наибо- .лее широко применяются в комплексных гидропередачах. Устройства, прижима- щие тела заклинивания к рабочим поверхностям обойм, не показаны.
D - диаметр цилиндрической обоймы, И - расстояние от оси вращения МСХ до рабочих плоских поверхностей обойм-, oi - минимально допустимьй угол заклиниванияi h - толщина обе- ч айки. Толщина h выбирается преимущественно из расчета деформации обечайки под действием максимальной статической радиальной нагрузки на величину диаметрального зазора. Под действием этой нагрузки происходит соприкосновение внутренней поверхности обечайки с наружной поверхностью ро- лика. При дальнейшей попытке сжать тело заклинивания его деформация происходит при резко увеличенной жест
Q
„
5
5
5
кости, а величина деформации ничтожна.
Однако возможно выбирать толщину h средней статической радиальной нагрузке. Это следует делать при увеличении класса точности изготовления механизма. В результате большее число тел заклинивания вступает в работу при приложении рабочих нагрузо ;.
При пониженной точности изготовления механизма толщину обечайки следует увеличивать для сокращения деформации обечайки приблизительно на 25% исходя из общих рекомендаций машиностроения по количеству реально работающих звеньев. h может быть увеличена с целью сокращения деформации обечайки примерно в два раза, если в агрегате, где применяется МСХ, имеют место резкие динамические нагрузки.
В предлагаемой конструкции по условиям работы трактора Т-130 толщина h выбрана из расчета деформации рбе- чайки на величину 2 под действием максимал ьной величины номинального крутящего момента в трансмиссии трактора.
МСХ работает следующим образом
В период холостого хода одна из обойм имеет меньшую угловую скорость, отстает от друг ой обоймы. Если угловая скорость обоймы 1 (фиг.1) при вращении об(}ймы 1 по часовой стрелке больше угловой скорости обоймы 2, вращающейся в том же направлении, обечайки 4 свободно вращаются в клиновом зазоре, образуемом обоймами 1
и 2, так как силы трения качения стремятся выкатить обечайку из клинового зазора несмотря на действие поджимного устройства (не показан). В период холостого хода ролики 3 вращаются внутри обечаек 4 свободно и неопределенно.
После выравнивания угловых скоростей обойм 1 и 2 при тенденции увеличения скорости обоймы 2 относительно скорости обоймы 1 создаются условия заклинивания МСХ, так как силы трения качения стремятся перекатить обечайку 4 в узкую часть клинового зазора. Под действием рабочей нагрузки обечайки 4 начинают сжиматься, обеспечивая незначительный поворот обойм 1 и 2 одна относительно другой. При этом движение деформирующих обечаек 4 по рабочим поверхностям обойм
515
1 и 2 являются чистым качением. С дальнейшим увеличением рабочей нагрузки происходит соприкосновение роликов 3 с внутренней поверхностью обечаек 4. После этого тело заклинивания, состоящее из ролика 3 и обечайки 4, резко увеличивает свою жесткость и дальнейший относительный поворот обойм 1 и 2 может происходить практически только за счет деформации ролика 3 и обойм 1 и 2. Перемещение ролика 3 за счет его деформации по внутренним поверхностям обечайки 4 продолжает оставаться |чистым качением. Перемещение обойм 1 и 2 при деформации ролика 3 совершенно незначительно и не отличается от того, что имеет место в известном устройстве, оно прекращается при достижении минимальной величины угла заклинивания, который практически не отличается от угла заклинивания при несдеформированном ролике 3.
Благодаря повышенной упругой податливости тел заклинивания, приводящей к большему относительному перемещению обойм при включении МСХ, в результате рабочая нагрузка передается значительно большим число тел заклинивания. Начало деформации упругого тела заклинивания происходит сразу же после выравнивания скоростей обойм (нет ударного включения). Крр- ме того, в предлагаемом МСХ значи тельно улучшаются условия работы тел заклинивания и при угловом рассогласовании осей обойм.
Долговечность и надежность предлагаемого МСХ не лимитируются периодичностью деформации упругих тел заклинивания, так как максимальная величина деформации обечайки незначительна и ограничена величиной диаметрального зазора 2о, которьй не будет превышать в реальных конструкциях 0,2 мм
Работа предлагаемого МСХ особенно эффективна при использовании большего числа тел заклинивания в случае тре
бования максимальной компактности механизма, как, например, при использовании в комплексных гидродинамических передачах. Конструкция такого МСХ показана на фиг.5. Этот МСХ работает, как описано выше.
I Обоснование размеров предлагаемой
конструкции.
Для схемы по фиг.1 очевидно, что
cosoC
niln
H+(gj 5d-&i o75D-(0,5d-)
Для схемы по фиг.5
10
cos d..
H-() o75D+(o75d-f)
откуда в общем случае формула для определения зазора имеет вид
15
л ±2H+d+ d+D} coso6 2(1+coso6)
25
Верхние знаки арифметических действий соответствуют механизму с внут- 20 ренней обоймой с цилиндрическими рабочими поверхностями, нижние знаки - для механизма с наружной обоймой с цилиндрическими рабочими поверхностями.
Фо.рмула изобр етення Механизм свободного хода, содержащий наружную и внутреннюю обоймы, рабочие поверхности которых у одной
плоские, а у другой цилиндрические и роликовые тела заклинивания, установленные между обоймами, отличающийся тем, что, с целью увеличения долговечности и надежности механизма, он снабжен цилиндрическими упругими.обечайками, охватьюаю- щими с зазором каждый ролик, при этом величина зазора между обечайкой и ро ликом определяется из вьфажения
f +2H+d+j d±D)cosci ZCT+cosoi)
где о - величина зазора,
Н - расстояние от центральной оси механизма до плоскости его рабочей поверхности, d - наружный диаметр обечайки, D - диаметр цилиндрических рабочих поверхностей обоймы, об - минимально допустимый угол
заклинивания ролика, верхние знаки арифметических действий соответствуют механизму, имеющему внутреннюю обойму с цилиндрическими рабочими поверхностями, нижние знаки - механизму с внешней обоймой, имеющей цилиндрические рабочие поверхности.
0,Scf-6
Фив.
| Благонравов А.А | |||
| Механические бесступенчатые передачи нефрикционного типа | |||
| - М.: Машиностроение, 1977, с.61-63, рис.29. |
