Изобретение относится к машиностроению и может быть использовано в комплексных гидродинамических передачах.
Целью изобретения является повышение надежности и долговечности.
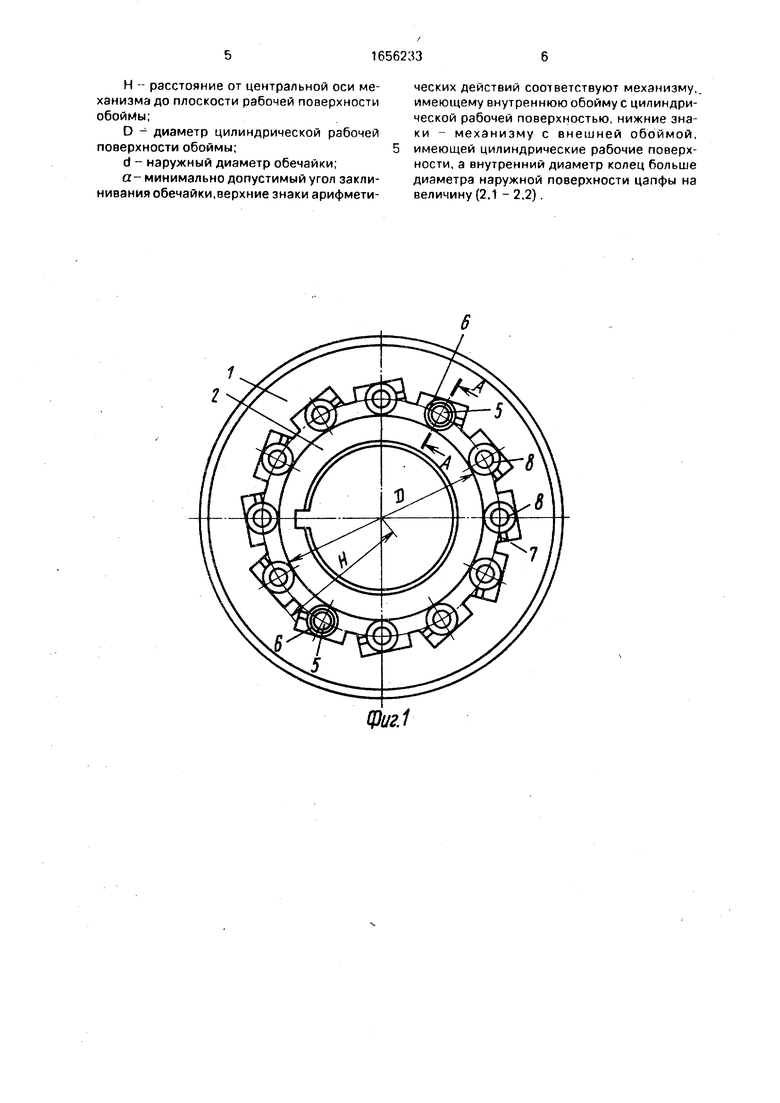
На фиг.1 показан механизм свободного хода, общий вид: на фиг.2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг.2,
Между наружной 1 и внутренней 2 обоймами, закрытыми с двух сторон защитными крышками 3, оппозитно расположены два ролика 4 с цапфами 5, на которых установлены упругие кольца 6. Ролики 4 поджаты в узкую часть выемок, выполненных, например, в наружной обойме 1, прижимными устройствами 7. Между обоймами 1 и 2 размещены также тела заклинивания в виде пустотелых цилиндрических обечаек 8, также поджатых прижимными устройствами 7.
Диаметр ролика 4 меньше диаметра упругого кольца 6 на величину 2д , т.е. на величину деформации колец 6 и обечаек 8 при передаче ими номинальной нагрузки, а диаметр цапфы 5 меньше внутреннего диаметра упругого кольца 6 на величину (2,Ю-2,20) U
Величина деформации определяется из выражения
о А ±2Н +d +(d ±Р) cos« 1 + cos a
где (5 - разность наружных радиусов упругого кольца и ролика;
Н - расстояние от центра оси механизма до плоскости рабочей поверхности обоймы;
D - диаметр цилиндрической рабочей поверхности обоймы;
d - наружный диаметр обечайки; а - минимально допустимый угол заклинивания обечайки.
Верхние знаки арифметических действий соответствуют механизму, имеющему внутреннюю обойму с цилиндрической рабочей поверхностью, нижние знаки - механизму с внешней обоймой, имеющей цилиндрические рабочие поверхности.
Механизм свободного хода (МСХ) работает следующим образом,
При включении МСХ все тела заклинивания в виде обечаек 8 деформируются на величину 2(5, при этом возрастает величина передаваемого с обоймы на обойму крутящего момента, в то же время в направлении деформации уменьшается зазор между кольцами 6 и цапфами 5 роликов 4 также на 2(5. Когда размер деформированного кольца 6 становится равным размеру ролика 4, происходит заклинивание ролика 4 между обоймами 1 и 2. При этом обечайки 8 передают полный расчетный крутящий момент, ролик
4не нагружен, цапфа 5 ролика 4 прижата к внутренней поверхности кольца 6 прижимным устройством 7, так как между наружной поверхностью цапфы 5 и внутренней поверхностью кольца б остается нормированный зазор, равный (0,05 - 0,1)(5 .
Любые колебания передаваемого МСХ
крутящего момента не приводят к затягиванию обечаек в клиновой зазор между обоймами 1 и 2, так как этому препятствует ролик 4, обладающий намного большей жесткостью, чем обечайки.
Таким образом, все дополнительные нагрузки на МСХ приводят к сжатию сплошного ролика 4 без дополнительной нагрузки колец 6, так как взаимодействие цапфы 5 и
деформированного кольца 6 определяется только усилием прижимного устройства 7.
Жесткость колец 6 значительно меньше жесткости обечайки, являющейся силовым элементом, но выше жесткости пружин прижимных устройств 7, что позволяет четко разделить функции следящих (кольца 6) и силовых (обечайки 8) элементов МСХ.
Таким образом, сплошные ролики 4 предохраняют обечайки 8 от чрезмерной
деформации в случае-возрастания нагру- женности МСХ, что повышает его надежность, а так как упругие кольца 6 на цапфах
5ролика 4 работают с малыми нагрузками, их износ минимален, следовательно, долговечность механизма повышается.
Формула изобретения
Механизм свободного хода, содержа- щий наружную и внутреннюю обоймы и размещенные между ними тела заклинивания, часть из которых выполнена в виде полых цилиндрических обечаек, отличающий- с я тем, что, с целью повышения надежно- сти и долговечности, остальная часть тел заклинивания, включающая два оппозитно расположенных тела, выполнена в виде роликов с соосными цилиндрическими цапфами на торцах и установленных на цапфах упругих цилиндрических колец, наружный диаметр которых больше наружного диаметра ролика на величину, определяемую из соотношения
,, , ±2H+d+(d±D)-coso: + cos a
где 2(5 - разность наружных диаметров упругого кольца и ролика;
Н - расстояние от центральной оси механизма до плоскости рабочей поверхности обой Мы;
D - диаметр цилиндрической рабочей поверхности обоймы;
d - наружный диаметр обечайки;
а- минимально допустимый угол заклинивания обечайки,верхние знаки арифметических действий соответствуют механизму,, имеющему внутреннюю обойму с цилиндрической рабочей поверхностью, нижние знаки - механизму с внешней обоймой, имеющей цилиндрические рабочие поверхности, а внутренний диаметр колец больше диаметра наружной поверхности цапфы на величину (2.1 -2,2).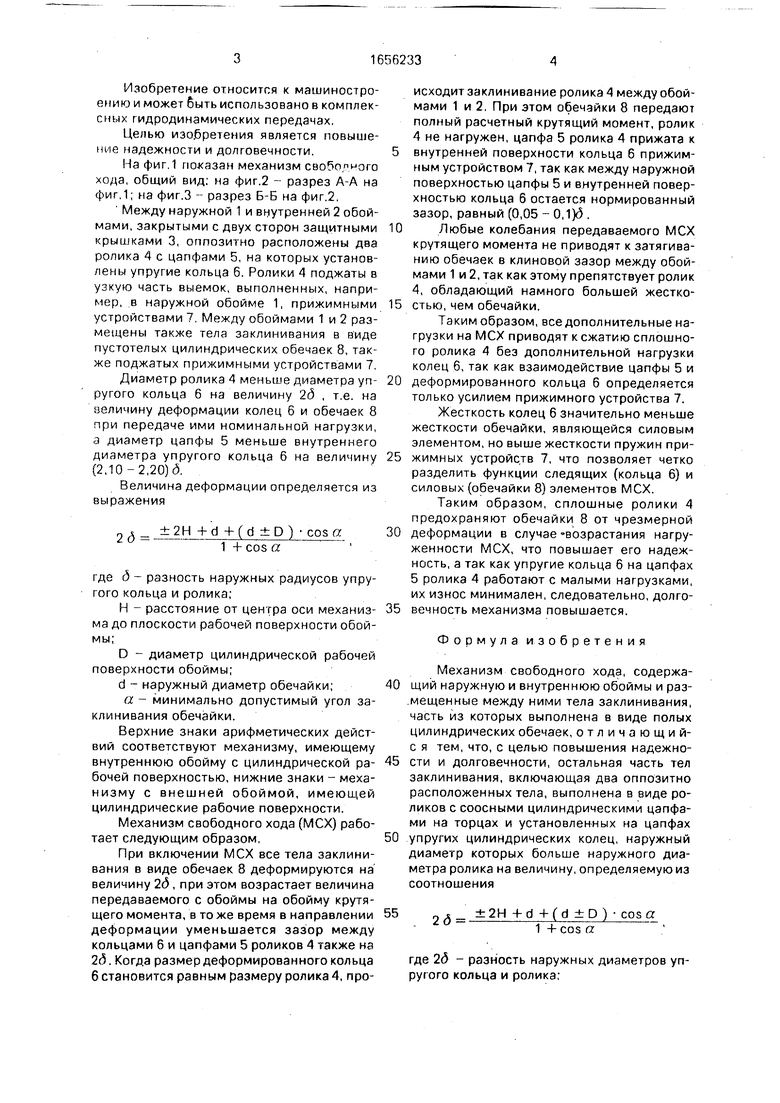
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм свободного хода | 1987 |
|
SU1523775A1 |
| РОЛИКОВАЯ МУФТА СВОБОДНОГО ХОДА | 2002 |
|
RU2224923C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МЕМБРАННОГО БЛОКА | 2005 |
|
RU2293235C1 |
| МЕХАНИЗМ СВОБОДНОГО ХОДА | 1972 |
|
SU432310A1 |
| МЕХАНИЗМ СВОБОДНОГО ХОДА | 1991 |
|
RU2013677C1 |
| Механизм свободного хода | 1976 |
|
SU625072A1 |
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2000 |
|
RU2194199C2 |
| АВТОМАТИЧЕСКИЙ ПРИВОД | 1994 |
|
RU2082050C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ИЗ ОБЕЧАЙКИ КОРПУСА ТРАНСПОРТНОЙ ЦИСТЕРНЫ И УСТРОЙСТВО ДЛЯ ФОРМООБРАЗОВАНИЯ ИЗ ОБЕЧАЙКИ НЕЦИЛИНДРИЧЕСКОГО КОРПУСА ТРАНСПОРТНОЙ ЦИСТЕРНЫ | 1995 |
|
RU2082529C1 |
| Упорный роликовый подшипник двустороннего действия | 1989 |
|
SU1733744A1 |
Изобретение относится к машиностроению и может быть использовано в комплексных гидродинамических передачах. Цель изобретения - повышение надежности и долговечности. Механизм содержит наружную 1 и внутреннюю 2 обоймы, между которыми оппозитно установлены ролики (Р) 4 и равномерно пустотелые цилиндрические обечайки, поджатые прижимными устройствами. На торцах Р 4 выполнены цапфы 5, на которых установлены упругие кольца (К) 6. 2 Диаметр Р 4 меньше диаметра 6 на величины 2 д - величину деформации К и обечайки при передаче и номинальной нагрузки, а диаметр цапфы 5 меньше внутре н- него диаметра К 6 на величину (2,10 -2,2)6 , включении механизма обечайка и соответственно К 6 деформируются на величину 2 6. При этом вся нагрузка передается обе -ай- кам, а Р 4, заклиниваясь между обоймами 1 и 2, остаются ненагруженными. Пои перегрузке механизма Р 4 воспринимают допол- нительную нагрузку, предотвращая дальнейший поворот обойм 1 и 2 относительно друг друга. Это предохраняет обечайки от чрезмерных деформаций, чтс повышает надежность механизма. Так как жесткость К 6 меньше жесткости обечаек и за счет того, что между цапфой 5 и внутренней поверхностью К 6 остается нормированный зазор (0,05 - 0, , нагрузка на К 6 минимальна, что снижает их износ и повышает долговечность механизма. 3 мп А-А С
Б-Б
3
фигЗ
| Механизм свободного хода | 1987 |
|
SU1523775A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
