Изобретение относится к неразрушающему контролю и может быть использовано для измерения толщины слоев многослойных крупногабаритных неферромагнитных изделий.
Цель изобретения - повышение точности измерений за счет устранения погрешностей, связанных с непостоянством скорости движения эллипсоида и изменением внешних условий.
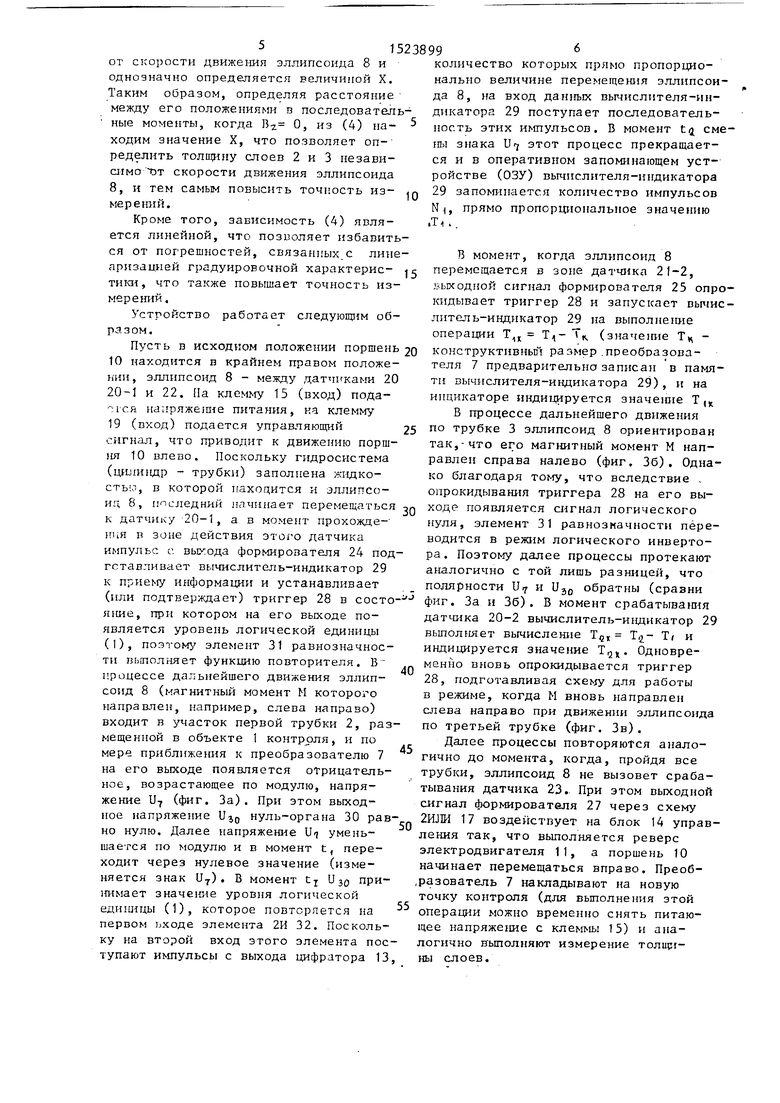
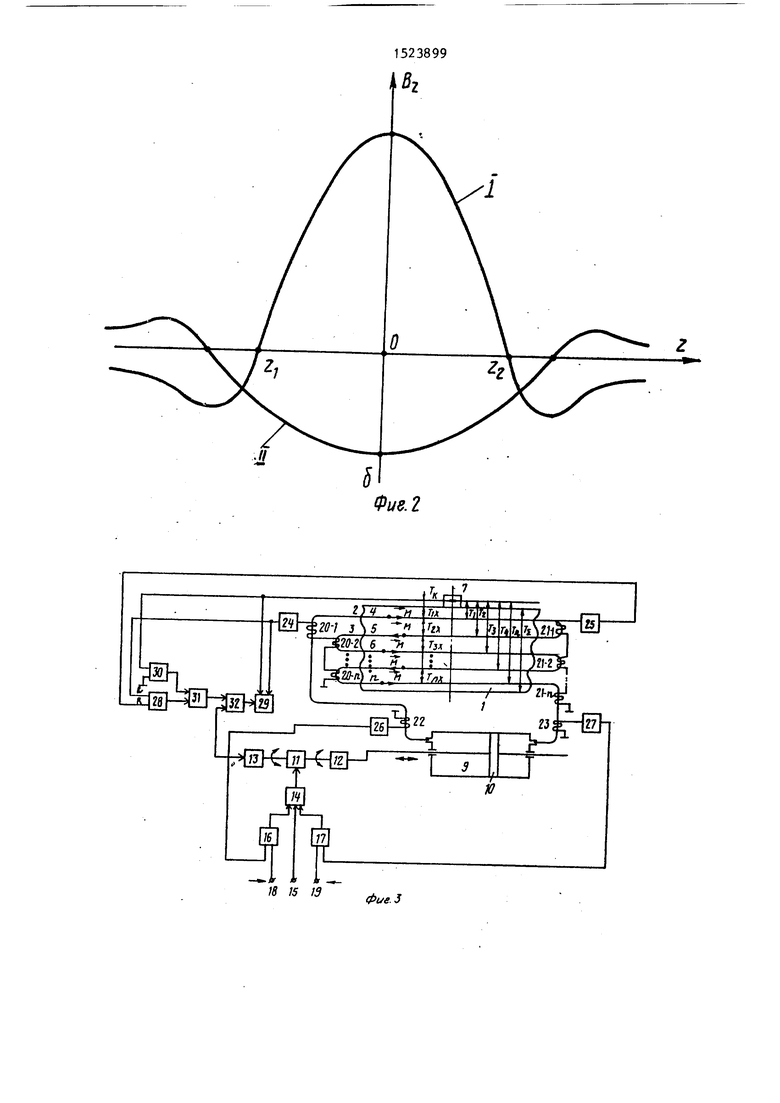
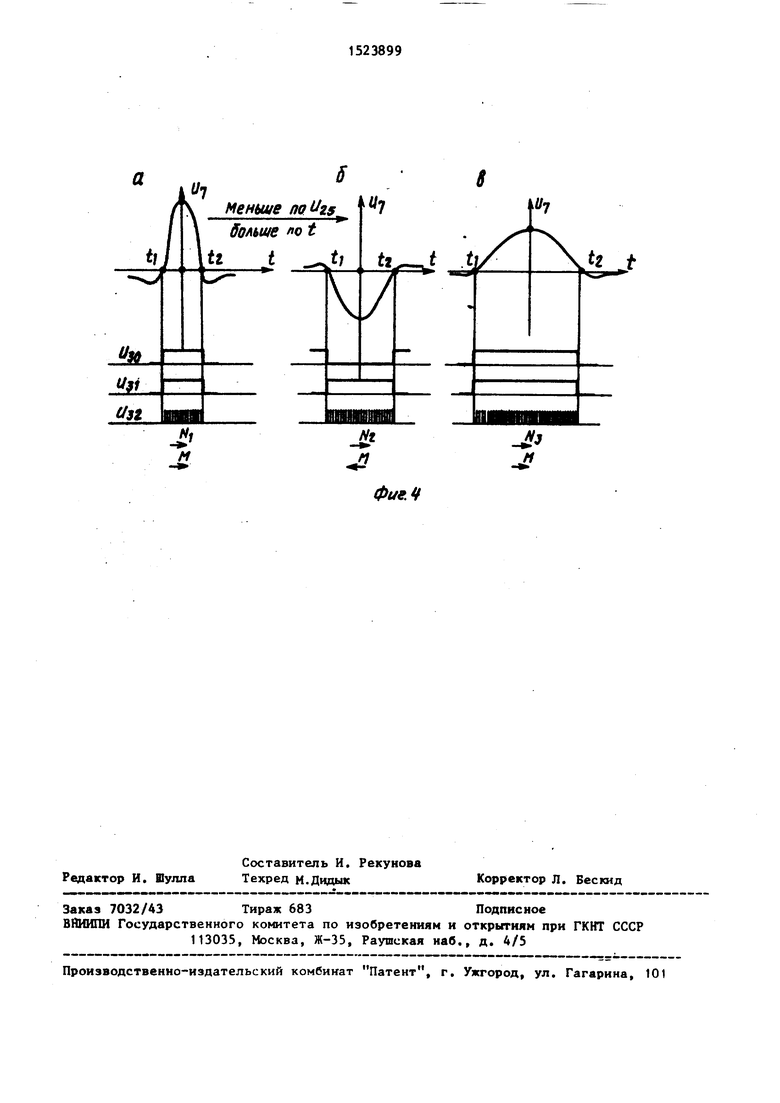
На фиг. 1 представлена схема осуществления способа; на фиг. 2 - зависимость Вг (Z) при движении эллипсоида по разным трубкам; на фиг.З - устройство для реализации предлагаемого способа; на фиг. 4 - временные диаграммы, поясняющие работу устройства .
На фиг. 4 U-j, Ujo, Uj4, U ,5 выходные напряжения блоков 7, 30, 31, 32. Схема включает многослойный объект 1 контроля, две соединенные последовательно трубки 2 и 3, размещен-1 ные между слоями 4, 5 и 6 соответственно, измерительный преобразователь 7 величины В и намагниченный эллипсоид 8. На схеме обозначены также М - магнитный момент эллипсоида 8; X - расстояние от преобразователя до трубки, в которой движется эллипсоид 8; Z - координата эллипсоида 8 по оси Z; Z к 2ч - точки, находясь в которых эллипсоид 8 создает в преобразователе 7 величину В.,, равную нулю; d расстояние между точками Zi к Zf .
сл
N2
оо
00
со со
10
5
Устройство выполнено следующим образом.
Между слоями 4,5,...,п объекта 1 контроля размещены соединенные последовательно трубки 2 и 3, подключенные к разным торцам гидроцилиндра 9, Управляемый привод поршня 10 гидроцилиндра 9 состоит из реверсивного электродвигателя 11 (с редуктором, если это необходимо) и линейного преобразователя 12 угла поворота выходного вала электродвигателя 11 в линейное перемещение (например, кулачкового механизма). На том же валу размещен цифратор 13 угла поворота вала (например, оптоэлектронный) . Питание электродвигателя 11 осуществляется через блок 14 уп- .равле1шя, имеющий три входа: вход 15 питания, входы Вправо и Влево, к которым подключены выходы схем 2ИЛИ 16 и 17 соответственно. Первые входы схем 2ИЛИ 16 и 17 подключены к клеммам ручного управления Вправо 18 и jc Влево 19 соответственно. На участках трубок 2 и 3, размещенных вне объекта 1 контроля, размещены датчики (например, датчики Холла) 20-1, 20-2,...,20-п, 21-1, 21-2,...,21-п, 22 и 23. Выходы датчиков 20 соедине- последовательно-согласно и их общий выход подключен к входу $ормпро1:ателя 24. Выходы датчиков 21 соединены аналогично и их общий выход подклю ан
1523899 13,
а выход - с входом данных вычислителя -ивдикатора 29.
Сущность способа заключается в следующем.
Известно, что
ТГ -22 Г ()52
(О
Эта зависимость использована при построении графиков .(фиг. 2). Из (1) следует, что при X const
ус
ловие Е О вьшолняется при двух зн чениях координаты
Z, - pLx;
fT
а их разность
20
d Z,- Z,
откуда paccTOHime
1
.
(2)
(3)
(4)
30
Ha фиг. 2 изображена зависимость B(j,(Z), когда тело движется по трубке 2 (кривая I) и по трубке 3 (кривая II). Направления магнитных моментов в первом и втором случаях про тивоположные, следовательно, противо положны знаки М и B-Z соответственно. :Согласно формуле (3) расстояние между
к входу формирователя 25. Выхода дат- 5 .нулями У второй кривой больше, чем у
первой, так как величина X для нее также больше.
40
чиков 22 и 23 также подключены к вхоам формирователей 26 и 27 соответственно. Выходы формирователей 26 и 27 подключены к вторым входам схем 2ИЛИ 16 и 17. Выходы формирователей 24 и 25 подключены к входам триггера 28 и входам управления вычислителя-индикатора 29 (вьтолненного, например, на основе микропроцессора). Выход накадного преобразователя 7 осевой (па- - раллельной закладным трубкам) составляющей магнитного поля эллипсоида 8, наложенного на наружную поверхность объекта 1 контроля в плоскости трубок 2 и 3, соединен с входом нуль- органа 30. Преобразователь 7 может быть реализован, например, на основе датчика Холла. Выходы триггера 28 и нуль-органа 30 соединены с входами элемента 31 равнозначности, выход которого соединен с первым входом элемента 2И 32, второй вход которого соединен с выходом цифратора
50
55
jc
1523899 13,
а выход - с входом данных вычислителя -ивдикатора 29.
Сущность способа заключается в следующем.
Известно, что
ТГ -22 Г ()52
(О
Эта зависимость использована при построении графиков .(фиг. 2). Из (1) следует, что при X const
условие Е О вьшолняется при двух значениях координаты
Z, - pLx;
fT
а их разность
(2)
jc
20
d Z,- Z,
(3)
откуда paccTOHime
1
.
(4)
Ha фиг. 2 изображена зависимость B(j,(Z), когда тело движется по трубке 2 (кривая I) и по трубке 3 (кривая II). Направления магнитных моментов в первом и втором случаях противоположные, следовательно, противоположны знаки М и B-Z соответственно. :Согласно формуле (3) расстояние между
.нулями У второй кривой больше, чем у
.нулями У второй кривой больше, чем у
первой, так как величина X для нее также больше.
Значение X, соответствующее расстояниям от преобразователя 7 до ближайшей трубки, обозначим Т, до следующей Т и так далее, до последней - Т. Толщины слоев определяются соответственно по формулам
к
,Т(п-0х
Тп- с
где Тк
конструктивный размер преобразователя, толщина последнего слоя
TJ:- Тп+ T,
где TV- - известная толщина изделия (фиг. 2).,
Из (1) и (2) следует, что .положение нулей проекции В не зависит
от cicopocTH движе1-1Ия эллипсоида 8 и однозначно определяется величиной X. Таким образом, определяя расстояние - между его положениями в последовательные моменты, когда В7. О, из (4) на- ходим значение X, что позволяет оп- ределить толщину слоев 2 и 3 независимо тэт скорости движения эллипсоида 8, и тем самым повысить точность измерений.
Кроме того, зависимость (4) является линейной, что позволяет избавиться от погрешностей, связанных.с линеаризацией градуировочной характерис- ТИ1Ш, что также повышает точность измерений.
Устройство работает следующим образом.
Пусть в исходном положении поршень 10 находится в крайнем правом положении, эллипсоид 8 - между датчиками 20 20-1 и 22. На клемму 15 (вход) пода- наиряжеште питания, на клемму 19 (вход) подается управляющ11Й
сигнал, что приводит к движению поршня 10 влево. Поскольку гидросистема (цили1щр - трубки) заполнена жидко- сгъ .о, в которой тгаходится и эллипсо- иц 8, последний начинает перемещаться к датчику 20-1, а в момент прохожде- кия в зоне действия этого датчика импульс с выхода формироватешя 24 под- гставливает вычислитель-индикатор 29
В процессе дальнейшего движения по трубке 3 эллипсоид 8 ориентирован так,-что его магнитный момент М направлен справа налево (фиг. 35). Однако благодаря тому, что вследствие . опрокидывания триггера 28 на его выходе появляется С11гнал логического нуля, элемент 31 равнозначности переводится в режим логического инвертора. Поэтому далее процессы протекают аналогично с той лишь разницей, что полярности и и UjQ обратны (сравни
40
к приему информации и устанавливает
(или подтверждает) триггер 28 в состо- - фиг. За и Зб) . В момент срабатыва шя , при котором на его вькоде по-датчика 20-2 вычислитель-И1адикатор 29
является уровень логической единицы (I), поэтом элемент 31 равнозначности вьэтолняет функцию повторителя. В процессе дальнейшего движения эллипсоид 8 (магнитный момент М которого направлен, например, слева направо) входит в участок первой трубки 2, размещенной в объекте 1 контроля, и по мере приближения к преобразователю 7 на его выходе появляется отрицательное, возрастающее по модулю, напряжение и (фиг. За). При этом выходное напряжение нуль-органа 30 равно нулю. Далее напряжение Ui умень45
50
вьшолняет вычисление Т Т,- Т индицируется значение . Одновременно вновь опрокидывается триггер 28, подготавливая схему для работы в режиме, когда М вновь направлен слева направо при движении эллипсоида по третьей трубке (фиг. Зв).
Далее процессы повторяются аналогично до момента, когда, пройдя все трубки, эллипсоид 8 не вызовет срабатывания датчика 23. При этом выходной сигнал формирователя 27 через схему 2ИЛИ 17 воздействует на блок 14 управления так, что выполняется реверс электродвигателя 11, а поршень 10 начинает перемещаться вправо. Преобразователь 7 накладывают на новую точку контроля (для выполнения этой операции можно време}1но снять питающее напряжение с клеммы 15) и аналогично вьшолняют измерение толир - ны слоев.
шается по модулю и в момент t, переходит через нулевое значение (изменяется знак и). В момент tj U30 при- 1имает значе1ше уровня логической ааи1шцы (1), которое повторяется на первом ьходе элемента 2И 32. Поскольку на второй вход этого элемента поступают импульсы с выхода цифратора 13,
0
0 5
п
количество которых прямо пропорционально величине перемещения эллипсоида 8, на вход данных вычислителя-индикатора 29 поступает последовательность этих иьшульсов. В момент t/i сме- №1 знака и7 этот процесс прекращается и в оперативном запоминающем устройстве (ОЗУ) вычислителя-индикатора 29 запоминается количество импульсов N(, прямо пропорциональное значению .Ti..
В момент, когда эллипсоид 8 перемещается в зоне датчика 21-2, выходной сигнал формирователя 25 опрокидывает триггер 28 и запускает вьпис- литель-индикатор 29 на выполнение операции Т T (значение Т - конструктивньп размер ,преобразователя 7 предварительно записан в памяти вычислителя-индикатора 29), и на индикаторе индицируется значешге Т,
В процессе дальнейшего движения по трубке 3 эллипсоид 8 ориентирован так,-что его магнитный момент М направлен справа налево (фиг. 35). Однако благодаря тому, что вследствие . опрокидывания триггера 28 на его выходе появляется С11гнал логического нуля, элемент 31 равнозначности переводится в режим логического инвертора. Поэтому далее процессы протекают аналогично с той лишь разницей, что полярности и и UjQ обратны (сравни
- фиг. За и Зб) . В момент срабатыва шя датчика 20-2 вычислитель-И1адикатор 29
0
5
0
5
вьшолняет вычисление Т Т,- Т индицируется значение . Одновременно вновь опрокидывается триггер 28, подготавливая схему для работы в режиме, когда М вновь направлен слева направо при движении эллипсоида по третьей трубке (фиг. Зв).
Далее процессы повторяются аналогично до момента, когда, пройдя все трубки, эллипсоид 8 не вызовет срабатывания датчика 23. При этом выходной сигнал формирователя 27 через схему 2ИЛИ 17 воздействует на блок 14 управления так, что выполняется реверс электродвигателя 11, а поршень 10 начинает перемещаться вправо. Преобразователь 7 накладывают на новую точку контроля (для выполнения этой операции можно време}1но снять питающее напряжение с клеммы 15) и аналогично вьшолняют измерение толир - ны слоев.
Пройдя все трубки, эллипсоид вызывает срабатьгаание датчика 22 и выходной сигнал его формирователя 26 через схему 2ИЛИ 16 вызывает реверс электродвигателя 11. Преобразователь 7 вновь накладывают на новую точку контроля и процессы измерения толщины слоев продолжаются последовафельно во всех заданных точках контроля, по ле чего с клеммы 15 (входа) снимают питающее напряжение.
Значение толщины последнего слоя Тих может определяться по формуле
Тп«- TS - Т„ Т,
где Tj - известная толщина всех слоев;
Tfl - размер, получаемый указан- ньм образом.
0
Формула изобретения
Способ измерения толщины слоев, заключающийся в том, что при изготовлении изделия между его слоями размещают диэлектрические цилиндрические трубки, по которым перемещают тело в виде эллипсоида вращения, намагниченного вдоль его большей оси, и измеряют составляющую индукции магнитного по- / ля вдоль рси намагниченности эллипсоида, отличающийся тем, что, с целью повышения точности изме-. рений, при перемещении эллипсоида вращения по каждой цилиндрической трубке фиксируют Т(ва его положения, при которых составляющая индукции магнитного поля равна нулю, и измеряют расстояние медду этими положениями, по которому определяют толщину соответствующего слоя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения толщины слоев | 1988 |
|
SU1610239A1 |
| Устройство управления весовым порционнымдОзАТОРОМ | 1979 |
|
SU836532A1 |
| Цифровой электромагнитный толщиномер | 1987 |
|
SU1446455A1 |
| Устройство для входного контроля изделий | 1989 |
|
SU1619313A1 |
| Устройство для входного контроля изделий | 1990 |
|
SU1746388A2 |
| Устройство для программного управления | 1983 |
|
SU1160367A1 |
| Цифровой уровнемер | 1984 |
|
SU1315817A1 |
| Способ обработки сигналов вторичного магнитного поля при геоэлектроразведке и устройство для его осуществления | 1990 |
|
SU1744663A1 |
| Цифровой компас | 1988 |
|
SU1515050A1 |
| Устройство для симметрирования токов трехфазных сетей | 1988 |
|
SU1686600A1 |
Изобретение относится к неразрушающему контролю и может быть использовано для толщинометрии слоев многослойных крупногабаритных неферромагнитных изделий. Цель изобретения - повышение точности измерения. Способ заключается в перемещении намагниченного вдоль большой оси эллипсоид вращения в диэлектрических цилиндрических трубках, размещенных между слоями изделия в процессе его изготовления. При движении эллипсоида наблюдают на поверхности изделия продольную (по оси эллипсоида) составляющую индукции его поля, фиксируют два последовательных положения эллипсоида в моменты равенства нулю этой составляющей и по расстоянию между этими положениями определяют расстояние от точки наблюдения до трубки с эллипсоидом. Для определения толщины всех слоев эллипсоид последовательно перемещают по всем трубкам. 4 ил.
Фие.1
/
/
.//
IB 15 /5
Фи8.2
фие. J
Uf
Меньше notJzs
i/7
Uj
i t
J2 f
Фие.
| Спусковой механизм двуствольного ружья | 1980 |
|
SU929988A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское cви,eтeльcтнo СССР № 1051369, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
