(Л
ел ю
4
О
ю
Изобретение относится к автоматике и может найти применение в системах регулирования частоты вращения электрических машин, а также в других системах автоматического ре-гули- рования.
Цель изобретения - повьшение точности регулятора.
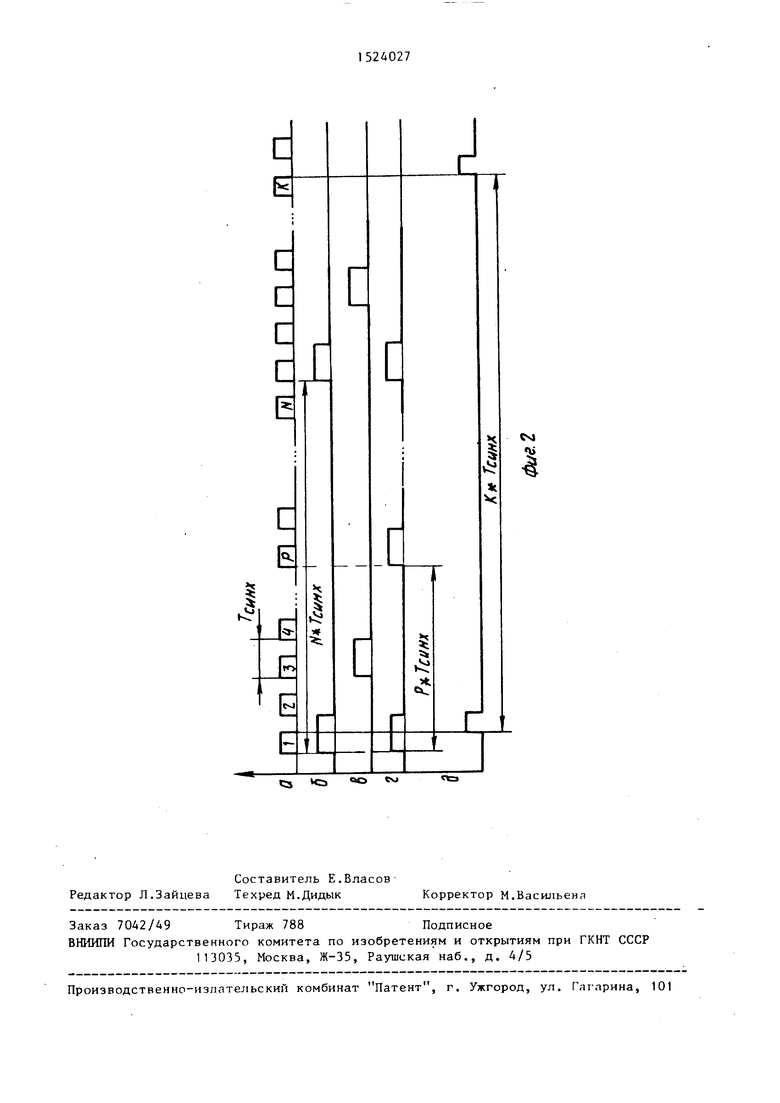
На фиг. представлена (Ьункциональ- ная схема регулятора; на фиг.2 - временная диаграмма, поясняющая его работу .
Цифровой регулятор частоты содержит формирователь 1 импульса, задаю- щий генератор 2, блок 3 распределения импульсов, второй и первый счетчики 4 и 5, первый и второй элементы 6 и 7 задержки, триггер 8, шину 9 нулевого потенциала, усилитель 10 мощ- ности, объект 1I регулирования, делитель 12 частоты, триггер 13, одновиб- раторы 14, регистр 15 сдвига.
Регулятор работает следующим образом.
Входной формирователь 1 формирует прямоугольные импульсы с периодом регулируемой частоты. Эти импульсы, как и импульсы с генератора 2 (фиг.2а) поступают на блок 3, который формиру- ет следующие последовательности импульсов управления.
На первом (фиг.2в) вьгходе блока 3 импульсы следуют с частотой FUJHM торая равна F, /N, где F син ча стота генератора 2; N - целое положительное число.
Длительность импульсов на этих выходах, как и сдвиг между ними, равна
смнх Д Т смм
Частота F определяет частоту переключения, например, ключевого усилителя 10 мощности, и соответственно, величину его динамических потерь.
На третьем выходе (фиг.2г) блока 3 импульсы следуют с частотой F, кратной частоте F. Частота F определяется величиной шага квантования коэффициента запс лнения выходного сигнала, поступающего на (ключевой) усилич ель 10 мощности.
На четвертом выходе блока 3 импульсы длительностью, меньшей Т(,, следуют с частотой, равной текущему значению регулируемой частоты.
На пятом выходе блока 3 импульсы следуют с частотой, равной номинальному значению .регулируемой частоты ном длительностью меньшей, чем cwH« /2. Частота F ц(,, получается путем деления F(, на целое число К (фиг.2б).
Нмпульсы на четвертом и пятом выходах блока 3 запускаются по фронту и, соответственно, по спаду импульсов генератора 2, что необходимо для бессбойной работы гчегчика 4, на который поступают nMnyjibcbi с четвертого выхода блока 3 с частотой F „ и
с пятого выхода с частотой FL
. Если F P5J- о содержимое счетчика 4 увеличивается, а если F p,r i , то уменьшается, причем скорость изменения содержимого определяется величиной AF F per ном случае равенства Fp F j, содержимое счетчика 4 не меняется.
По импульсам с первого выхода блока 3 с частотой FIJ содержимое счетчика 4 переписывается в счетчик 5, содержимое которого декрементируется с частотой F по импульсам с третьего выхода блока 3.
Триггер 8 устанавливается в единицу по входу установки (S) импульсом с второго выхода блока 3 и сбрасывается в О по сброса импульсом с выхода sact-ia счетчика 5 через время Т, равное Т Q 1/F, где Q - число, находящееся в счетчике 4 на момент записи его содержимого в счетчик 5.
Таким образом, на выходе триггера 8 формируется последовательность ши- ротномодулированных импульсов с заданной частотой 7 и длительностью, определяемой значением Q. Для Q О и Q М коэффициент заполнения равен соответственно нулю и единице. В случае выполнения равенства F ptr от содержимое первого счетчика 4 такое, что коэффициент заполнения имеет величину, необходимую для поддержания заданной скорости.
Таким образом, циЛровой регулятор скорости с измерительным органом в виде ренерсивного счетчика обладает астатической характеристикой.
В том случае, если число Q превышает разрядность счетчика 4, то по сигналу с выхода переноса через элемент 6 задержки записывается максимальное число, определяемое разрядностью этого счетчика. Если число Q уменьшается до нуля, то по игналу с выхода заема через элемент 7 задержки в счетчик 4 записывается О. Тем самым исключается ложная работа регулятора, связанная с переполнением счетчика А,
Цифровой регулятор частоты позволяет обеспечить точность регулирования, определяемую лишь точностью задающего генератора, так как весь тракт измерения и преобразования регулируемого параметра чисто цифровой и не вносит дополнительной погрешнос ти.
Формула изобретения
Цифровой регулятор частоты, содер жащий задающий генератор, усилитель мощности, выход которого подключен к выходу регулятора, вход которого под ключен к входу формирователя импульса, а также первый элемент задержки и первый счетчик, выход заема которо го соединен с входом сброса триггера, отличающийся тем, что, с целью повышения точности регулятора, в него введены блок распределения импульсов, вторюй счетчик
и второй элемент задержки, причем выходы задающего генератора и формирователя импульса подключены соответственно к тактовому и информационному входам блока распределения импульсов, первый выход которого подключен к входу разрещения записи первого счетчика, счетный вход на вычитание кото 0 рого соединен с треты м выходом блока распределения импульсов, второй вход которого подкл|8чеп к входу установки триггера, подключенного выходом к входу усилителя мощности, информаци)5 онньй вход первого счетчика соединен с информационным выходом счетчика, выходы переноса и заема которого подключены соответственно через первый и второй элементы.задержки, соответ- 20 ственно к входу разрешения записи и к входу сброса второго счетчика, счетный вход на суммирование и счетный вход на вычитание которого подключены соответственно к четвертому
25 и пятому выходам блока распределения импульсов, информационный вход триггера подключен к шине нулевого потенциала .
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой регулятор скорости | 1987 |
|
SU1534724A1 |
| Цифровой регулятор | 1983 |
|
SU1182485A1 |
| Цифровой регулятор | 1978 |
|
SU911458A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ КОЛЕБАНИЙ | 1991 |
|
RU2024912C1 |
| Шаговый электропривод | 1986 |
|
SU1372585A1 |
| Цифровой электропривод | 1983 |
|
SU1102002A1 |
| Программный регулятор | 1984 |
|
SU1231487A1 |
| Устройство для возбуждения резонансных колебаний сложных конструкций | 1985 |
|
SU1370472A1 |
| Цифровой электропривод | 1982 |
|
SU1050077A1 |
| Устройство для измерения и регулирования соотношения скоростей | 1984 |
|
SU1224726A1 |
Изобретение относится к автоматике и может быть использовано для регулирования частоты вращения электрических машин. Цель изобретения - повышение точности регулятора. Регулятор имеет астатическую характеристику регулирования, а тракт измерения и преобразования регулируемого параметра чисто цифровой, что не вносит дополнительной погрешности. Регулятор содержит формирователь импульса 1, задающий генератор 2, блок распределения импульсов 3, счетчики 4, 5, элементы задержки 6, 7, триггер 8, усилитель мощности 10. 2 ил.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для регулирования частоты вращения электромеханического исполнительного элемента | 1984 |
|
SU1239830A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
