С71
ГчЭ
ы
о
00 О1
20
(ffi/e.f
обучения. На проезжей части дороги 3 последовательнр установлены подвижные в боковом направлении передняя 1 и задняя 2 площадки, соединенные с силовыми гидроцилиндрами 7 и 8, связанными с блоком 6 управления. Вне проезжей части дороги установлен датчик 4 положения При въезде транспортного средства 5 на площадки пос- ледние перемещаются в боковом направлении, имитируя движение с боковым заносом. Обучаемый стремится ввести транспортное средство в заданный коридор, 2 ил.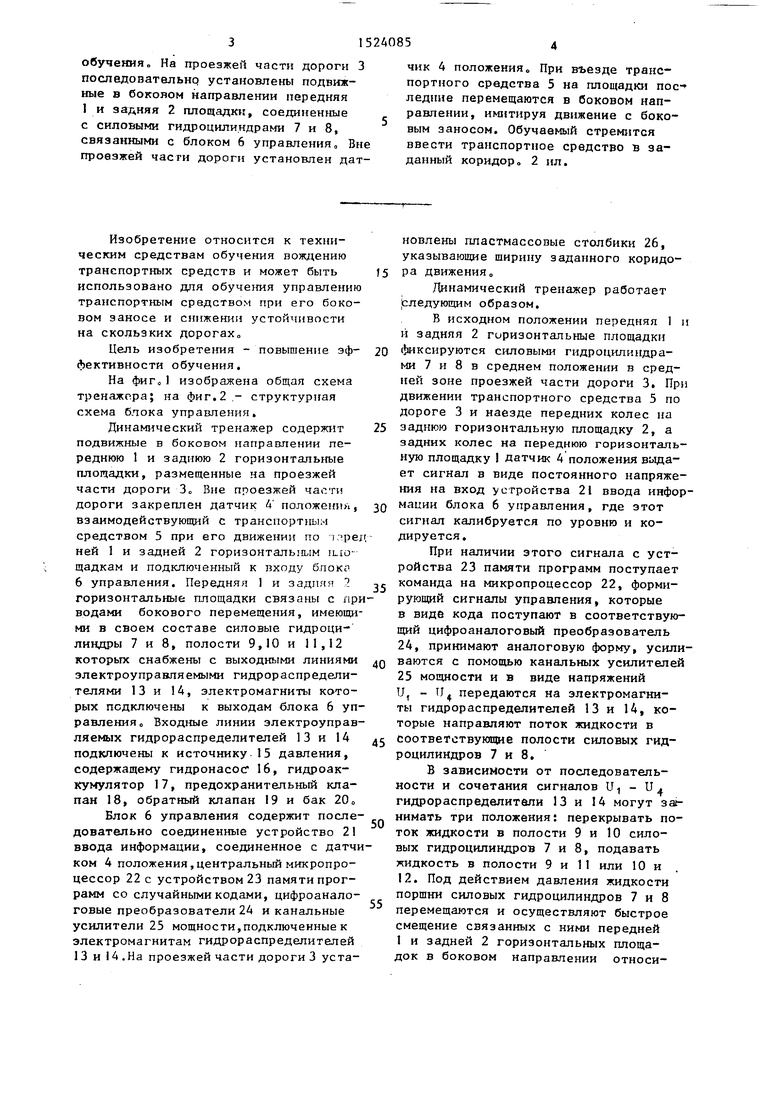
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИЙ СТЕНД-ТРЕНАЖЕР УСТОЙЧИВОГО ВОЖДЕНИЯ АВТОМОБИЛЯ | 2018 |
|
RU2694427C1 |
| СПОСОБ ОБУЧЕНИЯ РУЛЕНИЮ НА МЕСТЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2709339C1 |
| Тренажер для наземной подготовки парашютиста | 2023 |
|
RU2806470C1 |
| ТРЕНАЖЕР ДЛЯ ОТРАБОТКИ ДЕЙСТВИЙ ЛИКВИДАЦИИ ПОСЛЕДСТВИЙ ДОРОЖНО-ТРАНСПОРТНЫХ ПРОИСШЕСТВИЙ | 2021 |
|
RU2775323C1 |
| Тренажер транспортного средства | 1981 |
|
SU1054829A1 |
| СПОСОБ И УСТАНОВКА ДЛЯ СООРУЖЕНИЯ СКОРОСТНОЙ АВТОМОБИЛЬНОЙ ДОРОГИ И СКОРОСТНАЯ АВТОМОБИЛЬНАЯ ДОРОГА | 2001 |
|
RU2181396C1 |
| ИМИТАТОР ДОРОЖНЫЙ ТРЕНАЖЁРА ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2652696C2 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ВОЕННЫХ ГУСЕНИЧНЫХ МАШИН С РУЛЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2542694C1 |
| УЧЕБНО-ТРЕНИРОВОЧНОЕ СРЕДСТВО | 1998 |
|
RU2126127C1 |
| Тренажер водителей транспортного средства | 1975 |
|
SU536505A1 |
Изобретение относится к техническим средствам обучения вождению транспортных средств и может быть использовано для обучения управлению транспортными средствами при его боковом заносе и снижении устойчивости на скользких дорогах. Цель изобретения - повышение эффективности обучения. На проезжей части дороги 3 последовательно установлены подвижные в боковом направлении передняя 1 и задняя 2 площадки, соединенные с силовыми гидроцилиндрами 7 и 8, связанными сблоком 6 управления. Вне проезжей части дороги установлен датчик 4 положения. При въезде транспортного средства 5 на площадки последние перемещаются в боковом направлении, имитируя движение с боковым заносом. Обучаемый стремится ввести транспортное средство в заданный корридор. 2 ил.
Изобретение относится к техническим средствам обучения вождению транспортных средств и может быть использовано для обуче1шя управлению транспортным средством при его боковом заносе и снижении устойчивости на скользких дорогахо
Цель изобретения - повышение эф- Аективности обучения.
На фиго1 изображена общая схема тренажора; на фиг.2,- структур1гая схема блока управления.
Динамический тренажер содержит подвижные в боковом направлении переднюю 1 и заднюю 2 горизонтальные площадки, размещенные на проезжей части дороги Зо Вне проезжей части дороги закреплен датчик 4 положенил, взаимодействующий с транспортным средством 5 при его движении по 1: ре ней 1 и задней 2 горизонтальным ILIO- щадкам и подключенный к входу блока 6 управления. Передняя 1 и задняя 2 горизонтальные площадки связаны с прводами бокового перемещения, имеющими в своем составе силовые гидроцилиндры 7 и 8, полости 9,10 и 11,12 которых снабжены с выходными линиями электроуправляемыми гидрораспределителями 13 и 14, электромагниты которых подключены к выходам блока 6 управления Входные линии электроуправ ляемых гидрораспределителей 13 и 14 подключены к источнику 15 давления, содержащему гидронасос 16, гидроаккумулятор 17, предохранительный клапан 18, обратный клапан 19 и бак 20о
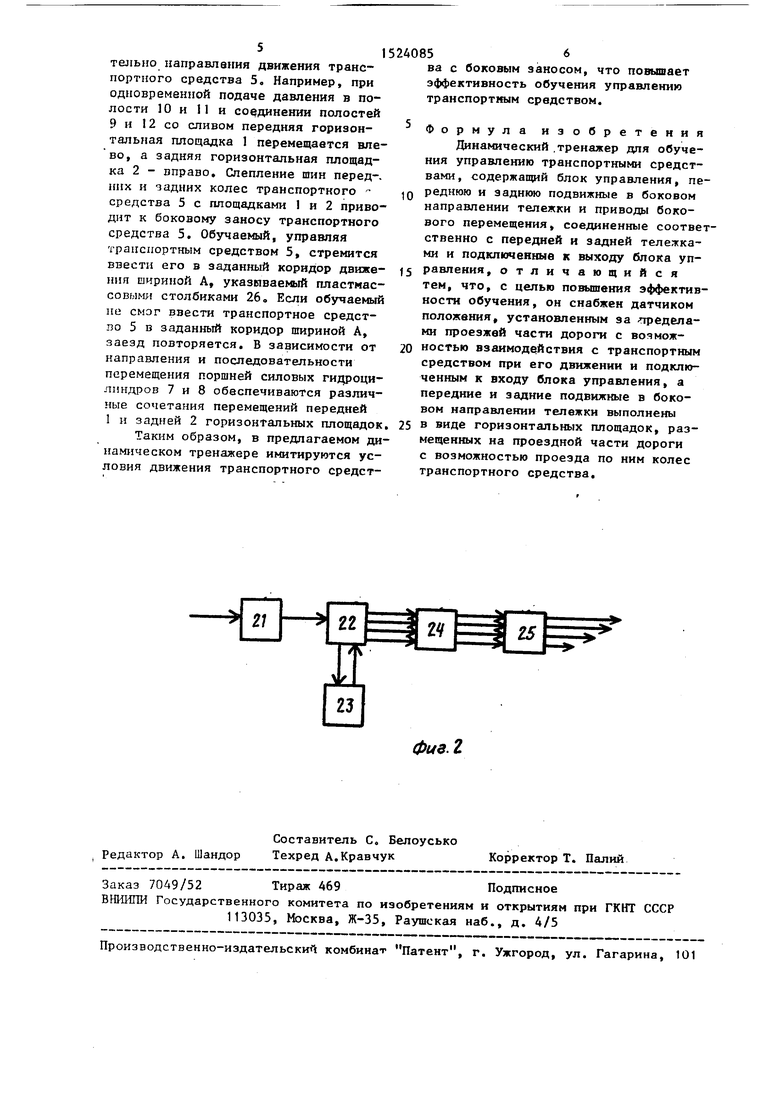
Блок 6 управления содержит после довательно соединенные устройство 21 ввода информации, соединенное с датчком 4 положения,центральный микропроцессор 22 с устройством 23 памяти программ со случайными кодами, цифроанало- говые преобразователи 24 и канальные усилители 25 мощности,подключенные к электромагнитам гидрораспределителей 13 и 14 .На проезжей части дороги 3 уста
15
20
5 О т Qдс
5
новлены пластмассовые столбики 26, указывающие ширииу заданного коридора движения.
Динамический тренажер работает Следующим образом.
В исходном положении передняя 1 и и задняя 2 горизонтальные площадки ({ФИКСИРУЮТСЯ силовыми гидроцилиндрами 7 и 8 в среднем положении в средней зоне проезжей части дороги 3, При движении транспортного средства 5 по дороге 3 и наезде передних колес на заднюю горизонтальную площадку 2, а задних колес на переднюю горизонтальную площадку I датчик 4 положения вьща- ет сигнал в виде постоянного напряжения на вход устройства 21 ввода информации блока 6 управления, где этот сигнал калибруется по уровню и кодируется.
При наличии этого сигнала с устройства 23 памяти программ поступает команда на микропроцессор 22, формирующий сигналы управления, которые в виде кода поступают в соответствующий цифроаналоговый преобразователь 24, принимают аналоговую форму, усиливаются с помощью канальных усилителей 25 мощности и в виде напряжений и, - передаются на электромагниты гидрораспределителей 13 и 14, которые направляют поток жидкости в соответствующие полости силовых гид- роцилиндров 7 и 8,
В зависимости от последовательности и сочетания сигналов U - U гидрораспределитали 13 и 14 могут заснимать три положения: перекрывать поток жидкости в полости 9 и 10 силовых гидроцилиндров 7 и 8, подавать жидкость в полости 9 и 11 или 10 и 12. Под действием давления жидкости поршни силовых гидроцилиндров 7 и 8 перемещаются и осуществляют быстрое смещение связаиных с ними передней 1 и задней 2 горизонтальных площадок в боковом направлении относительно направления движения транспортного средства 5, Например, при одновременной подаче давления в полости 10 и 11 и соединении полостей 9 и 12 со сливом передняя горизонтальная площадка 1 перемещается вле- во, а задняя горизонтальная площадка 2 - вправо, Спепление шин перед-, них и задних колес транспортного средства 5 с площадками 1 и 2 приводит к боковому заносу транспортного средства 5. Обучаемый, управпяя транспортным средством 5, стремится ввести его а заданный коридор движения шириной А, указываемый пластмассовыми столбиками 26о Если обучаемый не смэг ввести транспортное средство 5 в заданный коридор шириной А, заезд повторяется. В зависимости от направления и последовательности перемещения поршней силовых гидроцилиндров 7 и 8 обеспечиваются различные сочетания перемещений передней 1 и задней 2 горизонтальных площадок Таким образом, в предпагаемом динамическом тренажере имитируются условия движения транспортного средст
ва с боковым заносом, что повышает эффективность обучения управлению транспортным средством.
Формула изобретения Динамический.тренажер для обучения управлению транспортными средствами, содержащий блок управления, переднюю и заднюю подвижные в боковом направлении тележки и приводы бокового перемещения, соединенные соответственно с передней и задней тележками и подключенные к выходу блока управления, отличающийся тем, что, с целью повышения эффективности обучения, он снабжен датчиком положения, установленным за .пределами проезжей части дороги с возможностью взаимодействия с транспортным средством при его движении и подключенным к входу блока управления, а передние и задние подвижные в боковом направлении тележки выполнены в виде горизонтальных площадок, размещенных на проездной части дороги с возможностью проезда по ннм колес транспортного средства.
Фив. 2
