Изобретение относится к сварке, в частности к оборудованию стыковой сварки с нагревом токами высокой частоты и является дополнительным к основному авт. св. № 1234116
Цель изобретения - повышение производительности путем расширения технологических возможностей за счет автоматизации подачи труб и x взаимной ориентации.
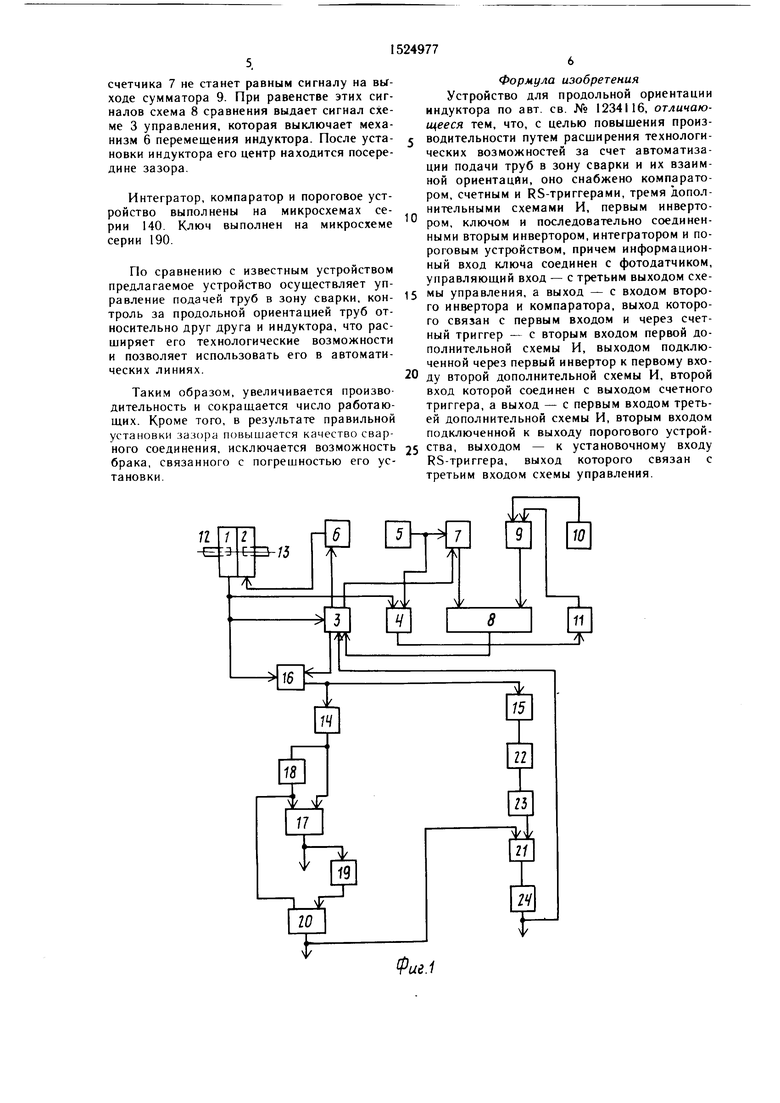
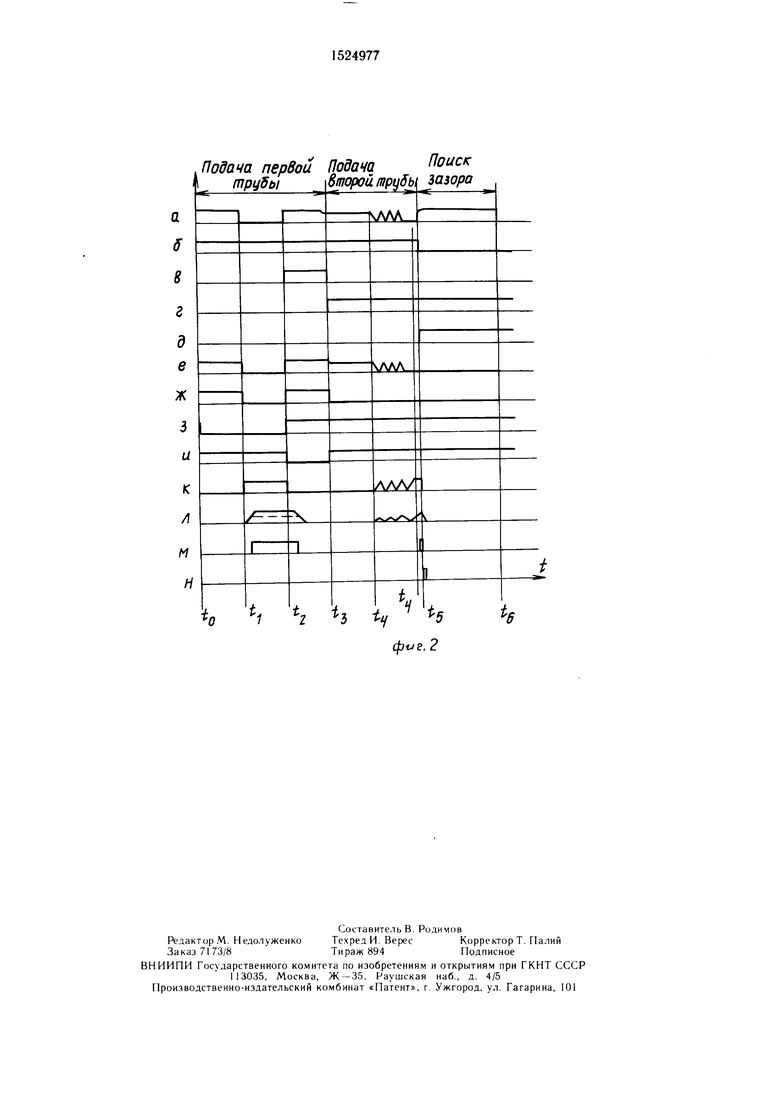
На фиг. 1 приведена функциональная слома устройства; на фиг. 2 - временные диаграммы его работы.
Устройство для продольной ориентации индуктора содержит фотодатчик 1, закрепленный на индукторе 2 так, что его оптическая ось совпадает с торцом индуктора 2, и соединенный со схемой 3 управления и одним из входов схемы И 4, другой вход которой подключен к выходу датчика 5 частоты
вращения двигателя механизма 6 перемешения индуктора,соединенного с индуктором 2. Выход датчика 5 подключен к счетчику 7. выход которого соединен с одним из входов схемы 8 сравнения, другой вход которой подключен к выходу сумматора 9, один из входов которого подсоединен к задающему устройству 10, а другой к выходу счетчика- делителя на два 11, вход которого связан с выходом схемы И 4.
Механизм 6 перемещения индуктора предназначен для обеспечения перемешения индуктора 2 вдоль труб 12 и 13.
Устройство содержит также компаратор 14 и второй инвертор 15, которые через ключ 16, вход управления которого подключен к схеме 3 управления, связаны с фотодатчиком 1, причем выход компаратора 14 Подсоединен к первому входу первой дополсд
ГчЭ
со
rsj
нительной схемы И 17 непосредственно, а ко второму - через счетный триггер 18. Выход схемы И 17 подан к приводу приемного рольганга (не показано) и соединен через первый инвертор 19 с входом второй дополнительной схемы И 20, второй вход которой связан со счетным триггером 18, а выход - с первым входом третьей дополнительной схемы И 21, другой вход которой связан через последовательно соединенные интегратор 22 и пороговое устройство 23 с инвертором 15, а выход через RS-триггер 24 - с входом схемы управления, связанной также с механизмом 6 перемещения индуктора, счетчиком 7 и схемой 8 сравнения. Выходы схемы И 20 и RS-триггера 24 поданы, кроме того, к устройствам включения левого и правого зажима соответственно (не показаны), выходы схемы И 17 и RS-триггера 24 - к концам приводов приемного и подающего рольгангоЕ (не показаны).
Устройство работает следующи.м обра- зо м.
По сигналу системы управления автоматизированной линией или оператора включается подающий рольганг, который начинает подавать трубу (момент времени to). При зтом на выходе фотодатчика 1 (фиг. 2а) присутствует высокий потенциал (датчик освещен, ключ 16 открыт) и на выходе компаратора 14 появляется высокий потенциал (фиг. 2м). который опрокидывает счетный триггер (фиг. 2.Ч) из «1 в «О.
Состояние остальных элементов схемы соответствует диаграмме, где приведены выходные сш налы (на фи|-. 2н схемы И 17. фиг. 2w инвертора 19, фиг. 2г схемы И 20. фиг. 2л интегратора 22; фи|-. 2м - порогового устройства 23, фиг. 2н - схемы И 21, фиг. 2() RS-триггера). В момент времени t труба перекрывает световой поток и на выходе фотодатчика 1 появляется низкий потенциал (фиг. 2а), а на выходе инвертора 15 высокий потенциал (фиг. 2к). При этом состояние управляющих выходов схемы (выходы схем И 17 и И 20 и RS-триггера, фиг. 2в, с. ,д) не изменяется. Далее труба движется и открывает в момент t. световой поток фотодатчика 1. При этом на выходах ключа 16, компаратора 14 и счетного триггера 18 (фиг. 2е, ж, з) появляется высокий потенциал, что приводит к появле- ,нию высокого потенциала и на выходе схемы И 17 (фиг. 2в). Этот сигнал включает приемный рольганг, которь1Й начинает передвигать трубу 12 в обратном направлении с небольшой скоростью. Когда труба 12 начнет перекрывать световой поток от фотодатчика 1 и уровень его упадет приблизительно на 1/3 от максимального (мо.мент времени 1з), срабатывает компаратор 14, на его выходе (фиг. 2ж) появляется низкий потенциал, что приводит к отключению приемного рольганга (фиг. 2й) и включению ле
5
0
5
0
5
0
5
0
вого зажима (фиг. 2г), который зажимает трубу 12.
Под действием этого же сигнала происходит сброс второй трубы 13 на подающий рольганг, труба поступает в зону сварки, соприкасается с трубой 12 (момент времени t), затем в результате упругой деформации отскакивает от трубы 12 несколько раз и через интервал времени (14-14) плотно соприкасается с трубой 12.
В интервале времени (t4-(4) сигнал фото- датчика 1 представляет собой импульсы, ко-- торые сглаживаются интегратором 22, сигнал с выхода которого не превышает порюга срабатывания порогового элемента 23. Когда труба 12 полностью перекроет световой поток фотодатчика 1, напряжение на выходе интегратора 22 растет до тех пор, пока не достигнет порога срабатывания порогового устройства 23, на выходе которого появится высокий потенциал (фиг. 2м). Высокий потенциал появится также на выходе схемы И 21 (фиг. 2н) и опрокинет RS-триггер 24. Сигнал с RS-триггера 24 (фиг. 2д) отключает подающий рольганг, включает механизм образования зазора (не показано) и, поступая также в устройство 3 управления, сигнализирует об окончании установки труб. На вход управления ключа 16 из схемы управления поступает сигнал, закрывающий ключ 16, а затем по сигналу схемы 3 управления индуктор 2 с закрепленным на нем фотодатчиком I начинает двигаться посредством механизма 6 перемещения вдоль зазора между трубами 12 и 13, при этом на выходе фотодатчика 1 присутствует высокий потенциал, поступающий на схему 3 управления и схему И 4.
Схема 3 управления открывает вход счетчика 7, который начинает считать путь, проходимый индуктором 2. Этим же сигналом открывается схема И 4, на выходе которой появляются импульсы от датчика 5 числа оборотов. Эти импульсы делятся на два счетчиком-делителем 11. После того, как фотодатчик 1 достигнет торца трубы 13, на его выходе появится низкий электрический потенциал, который закроет схему И 4 и счетчик делитель на два 11 прекратит считать импульсы. При этом, его выходной сигнал соответствует 1/2 длины зазора (Д) между трубами. Этот сигнал поступает на один из входов сумматора 9, на втором входе которого присутствует сигнал, соответствующий половине ширины 4 индуктора. Таким образом, сигнал на выходе сумматора 9 выразится формулой
.VfL 2
А - L Л -.
Эта величина соответствует расположению центра индуктора посередине зазора между трубами. Далее, индуктор 2 перемещается до тех пор, пока :игнал на выходе
счетчика 7 не станет равным сигналу на выходе сумматора 9. При равенстве этих сигналов схема 8 сравнения выдает сигнал схеме 3 управления, которая выключает механизм 6 перемещения индуктора. После установки индуктора его центр находится посередине зазора.
Интегратор, компаратор и пороговое устройство выполнены на микросхемах серии 140. Ключ выполнен на микросхеме серии 190.
По сравнению с известным устройством предлагаемое устройство осуществляет управление подачей труб в зону сварки, контроль за продольной ориентацией труб относительно друг друга и индуктора, что рас- щиряет его техиологические возможности и позволяет использовать его в автоматических линиях.
Таким образом, увеличивается производительность и сокращается число работающих. Кроме того, в результате правильной установки зазора повышается качество сварного соединения, исключается возможность брака, связанного с погрешностью его установки.
0
Формула изобретения Устройство для продольной ориентации индуктора по авт. св. № 1234116, отличающееся тем, что, с целью повыщения производительности путем расширения технологических возможностей за счет автоматизации подачи труб в зону сварки и их взаимной ориентации, оно снабжено компаратором, счетным и RS-триггерами, тремя дополнительными схемами И, первым инвертором, ключом и последовательно соединенными вторым инвертором, интегратором и пороговым устройством, причем информационный вход ключа соединен с фотодатчиком, управляющий вход - с третьим выходом схе5 мы управления, а выход - с входом второго инвертора и компаратора, выход которого связан с первым входом и через счетный триггер - с вторым входом первой дополнительной схемы И, выходом подключенной через первый инвертор к первому вхо0 ду второй дополнительной схемы И, второй вход которой соединен с выходом счетного триггера, а выход - с первым входом третьей дополнительной схемы И, вторым входом подключенной к выходу порогового устрой5 ства, выходом - к установочному входу RS-триггера, выход которого связан с третьим входом схемы управления.
а
S
8 г
д е
ж
3 и
к л
м н
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ СОРТИРОВКОЙ НАРЕЗАННОГО КАРТОФЕЛЯ | 1990 |
|
RU2016670C1 |
| Устройство для измерения сопротивления | 1988 |
|
SU1649468A1 |
| Устройство контроля качества радиотелефонных каналов связи | 1982 |
|
SU1100737A1 |
| Способ измерения времени установления выходного сигнала цифроаналоговых преобразователей и устройство для его осуществления | 1987 |
|
SU1494216A1 |
| Устройство для управления регулируемым мостовым инвертором | 1988 |
|
SU1548830A1 |
| Устройство для продольной ориентации индуктора | 1986 |
|
SU1318366A2 |
| Устройство для управления вентильным преобразователем со слежением | 1988 |
|
SU1607061A1 |
| РАДИОЛОКАТОР-ИНТРОСКОП | 1994 |
|
RU2096767C1 |
| Фазосмещающее устройство для управления вентильным преобразователем | 1984 |
|
SU1166233A1 |
| Устройство контроля качества радиотелефонных каналов связи | 1986 |
|
SU1332546A2 |
Изобретение относится к машиностроению, а именно к сварочному оборудованию.Цель изобретения - повышение производительности за счет автоматизации подачи труб и их взаимной ориентации. Устройство содержит индуктор, механизм его перемещения, датчик числа оборотов двигателя механизма перемещения индуктора, схему управления, а также схему И, счетчик, счетчик-делитель на два, сумматор, схему сравнения и задающее устройство. С помощью указанных элементов определяется положение центра индуктора относительно зазора между трубами. Для автоматизации продольной ориентации труб относительно друг друга и индуктора в устройстве имеется ключ, компаратор, счетный и RS триггер, два инвертора, интегратор, пороговое устройство и три схемы И. С помощью этих блоков производится автоматическое управление подающим и приемным рольгангами, а также зажимами левой и правой труб по сигналам от фотодатчика и блоков определения положения индуктора относительно зазора. 2 ил.
. 2
| Устройство для продольной ориентации индуктора | 1984 |
|
SU1234116A1 |
| кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
