1
Изобретение относится к гироскопическому приборостроению и может быть использовано при разработке прецизионных малогабаритных автоматических гирокомпасов, в частности маркшейдерских.
Известен автоматический назем ный гирокомпас, содержащий чувствительный элемент, включающий гиромотор с горизонтально закрепленной осью вращения, датчик углового положения чувствительного элемента в азимуте относительно корпуса гирокопаса, соединенный через вычислительное устройство с управляемым электроприводом и арретирукяцее устройство ц.
Недостатки данного устройства обусловлены тем, что ограничена величина начального отклонения чувствительного элемента от плоскости меридиана, что требует предварительиого ориентирования гирокомпаса. Кроме того, для ориентирования заданного направления необходимо снабдить такой гирокомпас угломерным устройством типа теодолита, требуется большое число механических и электромеханических элементов, угложияюших конструкцию и техмоЛогию изготовления, снижающих эксп/Гуатационную надежность прибора.
Цель изобретения - упрощение конструкции гирокомпаса.
Указанная цель достигается тем, что в автоматический наземный гирокомпас, содержащий чувствительный элемент, включающий гиромотор с горизонтально закрепленной осью вргице0ния, датчик углового положения чувствительного элемента в азимуте относительно корпуса гирокомпаса, соединенный через вычислительное устройство с управляемым электроприводом,
5 и арретирукицее. устройство, дополнительно введены, по крайней мере, еше один гиромотор с горизонтальной осью вращения, еще один электропривод гиромотора и два датчика угловых ског
0 ростей вращения гиромоторов, командное и коммутирующее устройства, причем оси вращения гиромоторов образуют между собой постоянный фиксированный угол в плоскости, перпендикуляр5ной оси подвеса чувсвительного элемента, а выходы датчиков угловых скоростей вращения гиромоторов подсоединены ко входам вычислительного устройства, выходы которого связаны через командное устройство с арретирующим устройством и коммутирующим устройством, соединяющим обмотки питани гиромоторов с электроприводами.
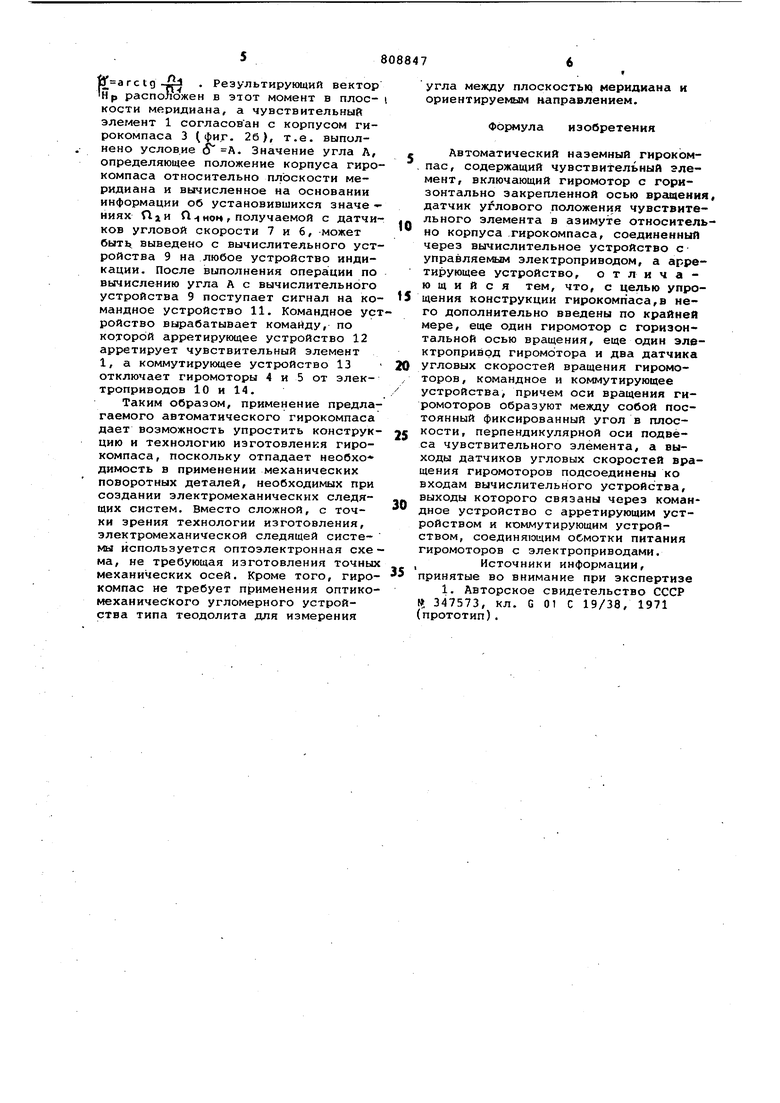
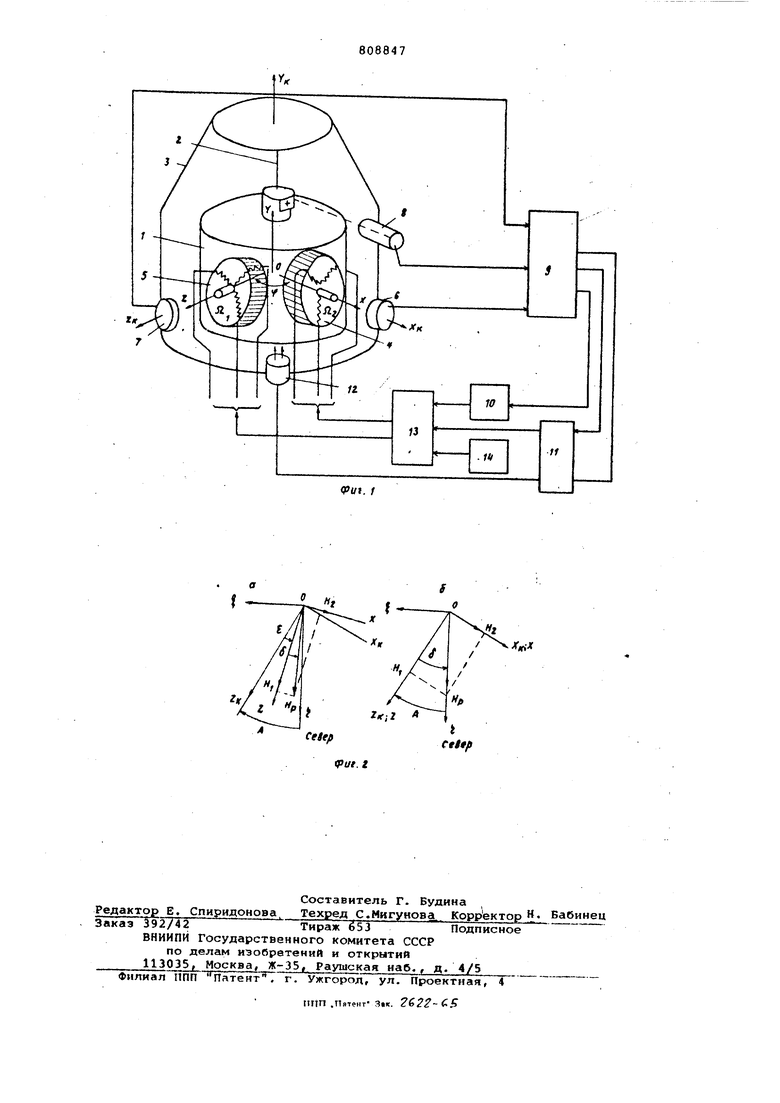
На фиг. 1 изображена принципиальная схема автоматического наземного гирокомпаса на фиг. 2 - положения чувствительного элемента и суммарного вектора кинематического момента в азимуте в текущий и в конечный моменты времени.
Автоматический наземный гирокомпас содержит чувствительный элемент 1 , подвешенный на торсионе 2 в корпусе 3. В чувствительном элементе 1 под фиксированным углом Ч друг к другу в плоскости, перпендикулярной оси подвеса, жестко закреплены оси гиромотрров 4 и 5. На корпусе гирокомпаса 3 расположены датчики 6 и 7 угловой скорости вращения гиромоторо
4и 5,а также датчик 8 углового положения чувствительного элемента в азимуте относительно корпуса Гирокомпаса 3. Выходы датчика 8 углового положения чувствительного элемента и датчиков 6 и 7 угловой скорости вращени гиромоторов подсоединены ко входам вычислительного устройства 9, один выход которого связан со входом управляемого электропривода 10, а другие выходы через командное устройство 11 соединены с арретируЮщим устройством 12 и одним из входов коммутирующего устройства 13, к другим входам которого подсоедин НЕз электроприводы 10 и 14; при этом выходы коммутирующего устройства 13 соединены с обмотками питания гиромоторов 4 и 5.
Гирокомпас работает следующим образом.
При включении прибора по первой команде с командного устройства 11 коммутирующее устройство 13 подключает обмотки питания гиромотора
5к электроприводу 14. Гиромотор 5 начинает разгоняться. При этом
с датчика 7 угловой скорости вращения гиромотора в вычислительное устройство 9 поступает сигнал, пропорциональный угловой скорости П. При достижении гиромотором 5 номинального значения угловой скорости вычислительного устройства 9 на командное устройство поступает сигнал, и командное устройство формирует вторую команду, по которой арретирующее устройство 12 разарретирует чувствительный элемент 1. В момен разарретирования вектор кинетического момента Н гиромотора 5 расположен в плоскости горизонта, а угол С между чувствительным элементом 1 и корпусом гирокомпаса 3 близок к нулевому значению. Вектор Н в соответствии с принципом действия маятникового гирокомпаса начинает совершать прецессионное движение по направлению к плоскости меридиана.
При этом чувствительный элемент 1 отклоняется от корпуса гирокомпаса
3на угол е. . Вычислительное устройство 9 формирует сигнал, пропорциональный функции . и интегралу 14 Jed t. Сигнал пропорциональный slgne, поступает на командное устройство 11, которое вырабатывает команду на подключение коммутирующим устройством 13 обмоток питания гиромотора 4 к управляемому электроприводу 10. Чередование фаз обмоток питания гиромотора при подключении соответствует соотношению
. Сигнал, пропорциональный интегралу K,Cdt, с выхода вычислительного устройства 9 поступает на вход управляемого электропривода 10. Гиромотор 4 начинает разгоняться, и возникает второй кинетический момент H.J, ас датчика угловой скорости в вычислительное устройство 9 поступает сигнал, пропорциональный угловой скорости Qj- Вследствие возникновения Н,, по направлению к плоскости меридиана начинает перемещаться результирующий вектор Нр, являющийся геометрической суммой Н н Н. При этом угол сУ, отсчитываемый от оси вращения гиромотора 5 до результирующего вектора кинетического момента Пр (фиг. 2а), является функцией угловых скоростей вращения гиромоторов
4и 5. Если фиксированный угол S между осями гиромоторов 4 и 5 равен -| (), то при равенстве моментов инерции роторов гиромоторов величинаб -аГС tg-«- . По информации с датчиков угловой скорости
7 и б вычислительное устройство 9 вычисляет величину 6, сравнивает ее с величиной K Jsd-t и формирует сигнал управления управляемым приводом 10, обеспечивая выполнение условия
(. (1)
в процессе измерения угловой скорости fl 2. результирующий вектор кинетического момента перемещается относительно корпуса чувствительного элемента 1 по направлению к меридиану. Если начальное отклонение чувствительного элемента 1 от меридиана не превышает 45°, то по мере приближения вектора Йр к плоскости меридиана скорость нарастания угла | уменьшается, в какой-то момент времени становится равной нулю, а затем угол С уменьшается. Увеличение угловой скорости Пэ происходит до тех пор, пока угол С, не станет равным нулю. По нулевому сигналу с датчика угла 8 вычислительное устройство фиксирует сигнал на входе управляемого привода 10. При этом фиксируется угловая скорость вра-(щения гиромотора 4 П j и величина |У агс1д arcig-.ipi . Результирующий вектор HP располож расположен в этот момент в плоскости меридиана, а чувствительный элемент 1 согласован с корпусом гирокомпаса 3 (фиг, 26), т.е. выполнено условие cj А. Значение угла Л, определяющее положение корпуса гирокомпаса относительно плоскости меридиана и вычисленное на основании информации об установившихся значе - ниях Паи О НОИ г получаемой с датчиков угловой скорости 7 и 6, может быть выведено с вычислительного устройства 9 на любое устройство индикации. После выполнения операции по вычислению угла А с вычислительного устройства 9 поступает сигнал на командное устройство 11. Командное уст ройство вырабатывает команду, по которой арретирующее устройство 12 арретирует чувствительный элемент 1, а коммутирующее устройство 13 отключает гиромоторы 4 и 5 от электроприводов 10 и 14. Таким образом, применение предлагаемого автоматического гирокомпаса дает возможность упростить конструкцию и технологию изготовления гирокомпаса, поскольку отпадает необхо димость в применении механических поворотных деталей, необходимых при создании электромеханических следящих систем. Вместо сложной, с точки зрения технологии изготовления, электромеханической следящей системы используется оптоэлектронная схе ма, не требующая изготовления точных механических осей. Кроме того, гирокомпас ие требует применения оптикомеханического угломерного устройства типа теодолита для измерения угла между плоскостью меридиана ориентируемым направлением. Формула изобретения Автоматический наземный гирокомпас, содержащий чувствительный элемент, включающий гиромотор с горизонтально закрепленной осью вращения, датчик углового положения чувствительного элемента в азимуте относительно корпуса .гирокомпаса, соединенный через вычислительное устройство с управляемым электроприводом, а арретирующее устройство, отличающийся тем, что, с целью упрощения конструкции гирокомпаса,в него дополнительно введены по крайней мере, еще один гиромотор с горизонтальной осью вращения, еще один электропривод гиромотора и два датчика угловых скоростей вращения гиромоторов, командное и коммутирующее устройства, причем оси вращения гиромоторов образуют между собой постоянный фиксированный угол в плоскости, перпендикулярной оси подвеса чувствительного элемента, а выходы датчиков угловых скоростей вращения гиромоторов подсоединены ко входам вычислительного устройства, выходы которого связаны через командное устройство с арретирующим устройством и коммутирующим устройством, соединяющим оСмотки питания гиромоторов с электроприводами. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР №. 347573, кл. G 01 С 19/38, 1971 (прототип).
Ptf. /
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический наземный гирокомпас | 1982 |
|
SU1051375A1 |
| Наземный гирокомпас | 1976 |
|
SU550862A1 |
| Наземный гирокомпас | 1976 |
|
SU606414A1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОКУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2165074C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 2004 |
|
RU2274832C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОЕКЦИЙ ГОРИЗОНТАЛЬНОЙ СОСТАВЛЯЮЩЕЙ ВЕКТОРА УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ЗЕМЛИ ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТАЛЬНОГО НАПРАВЛЕНИЯ (КОМПАСИРОВАНИЯ) | 2005 |
|
RU2300078C1 |
| ГИРОКОМПАС | 2007 |
|
RU2339910C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2207506C1 |
| ГИРОКОМПАС | 2015 |
|
RU2611575C1 |
| САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2166733C1 |
celtf
