Изобретение относится к прецизионным металлорежущим станкам и может применяться в станкостроительной и .металлообрабатывающей отраслях.
Целью изобретения является упрощение конструкции и повышение точности обработки резьб за счет согласования числа оборотов вращения шпинделя с деталью и перемещения инструмента.
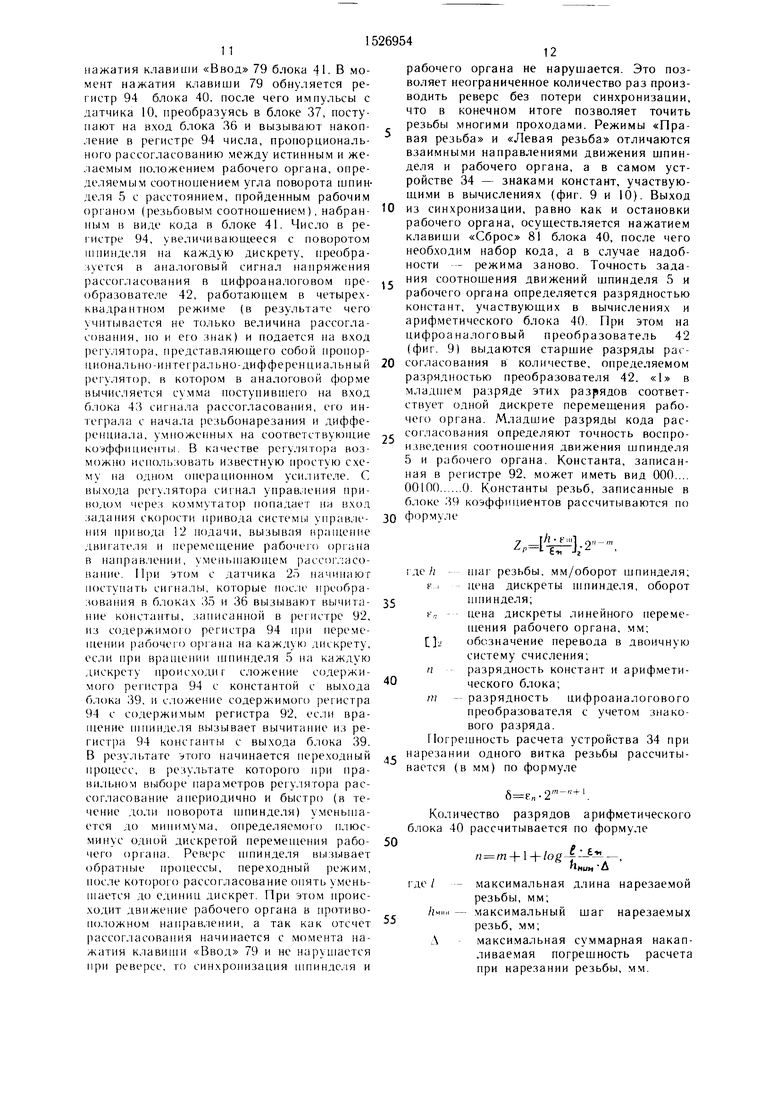
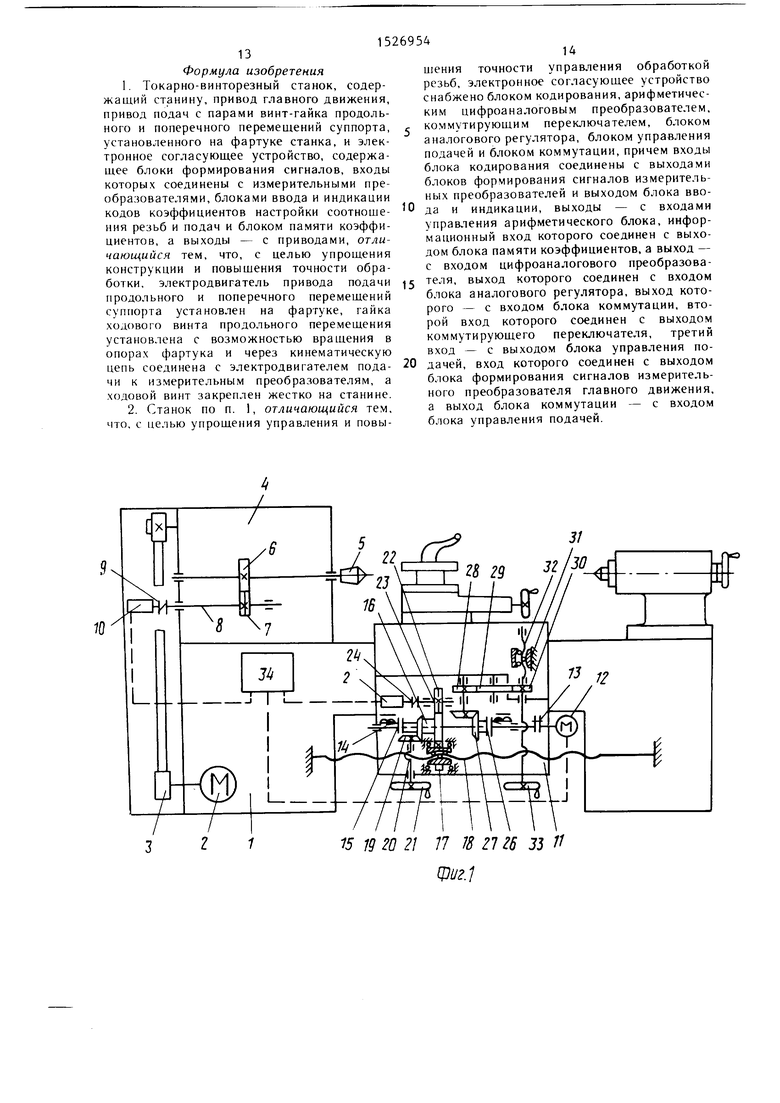
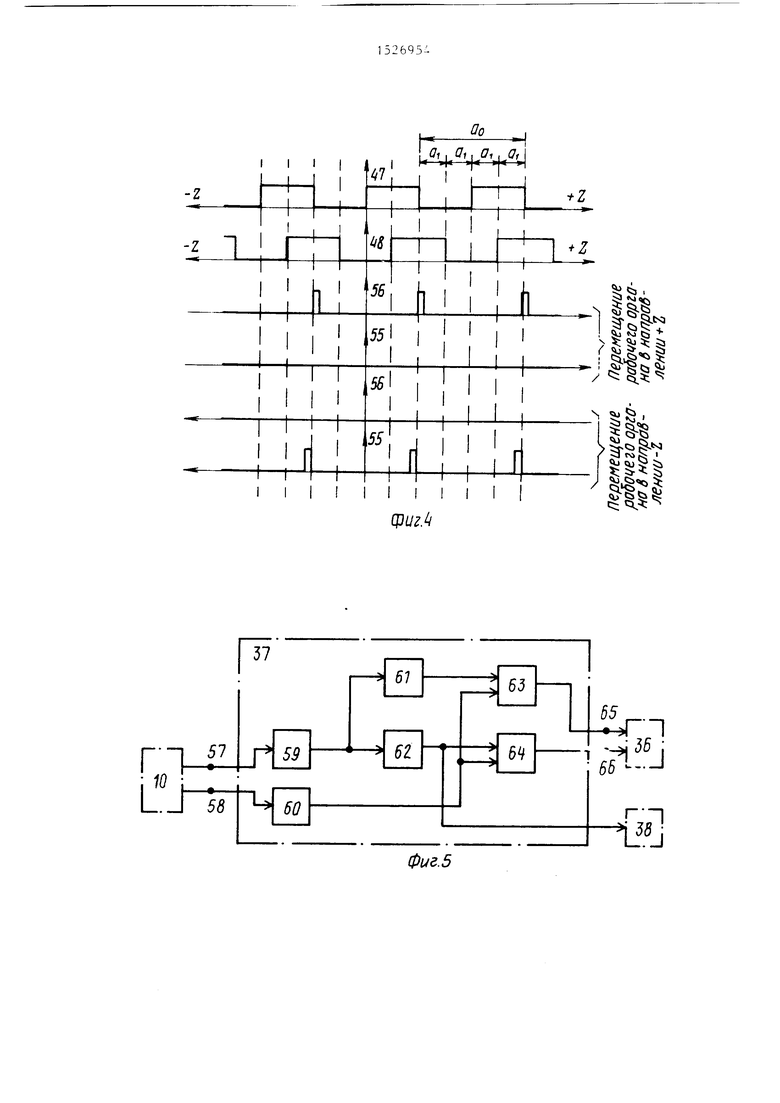
На фиг. 1 представ,1ена кинематическая схе.ма токарно- винторезного станка; на фиг. 2структурная схема электронносогласующего устройства; на фиг. 3 - структурная схема блока формирования си1-налов измерительных преобразователей рабочих органов станка; на фиг. 4 - эпюры выходных сигналов датчиков и элементов И; на фиг. 5 - структурная схема блока формирования сигналов вращения шпинделя; на фиг. 6 - структурная схема блока управления нодач; на фиг. 7 --- структурная
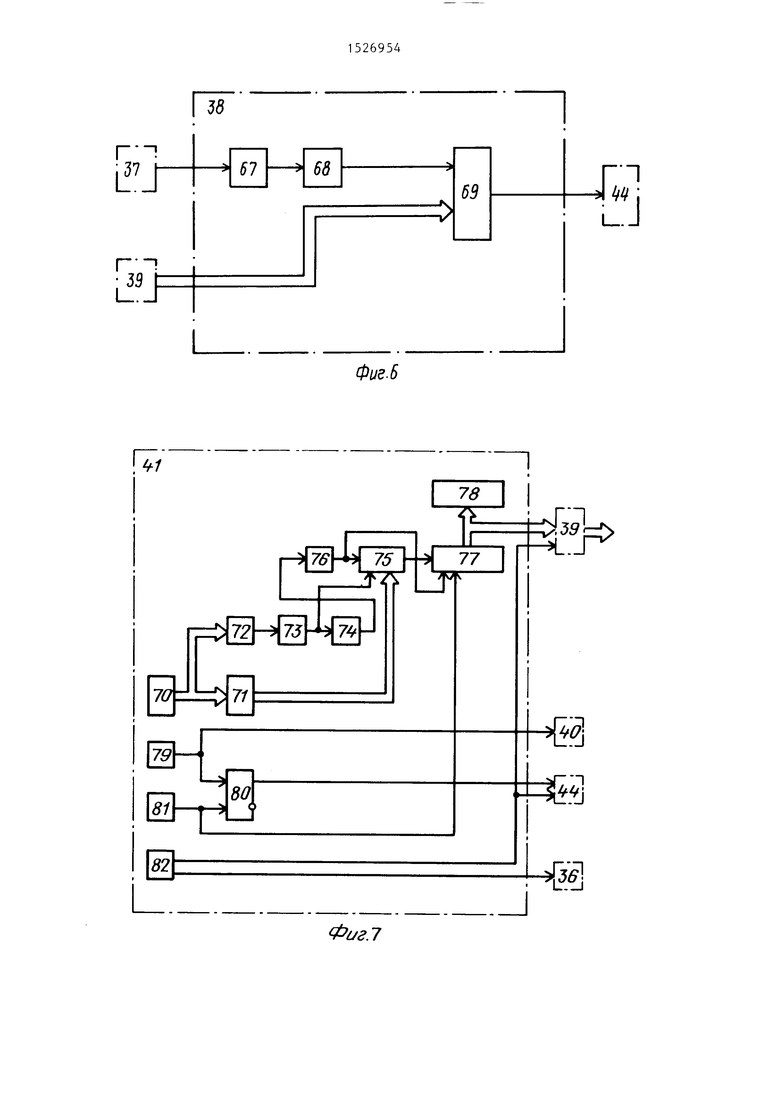
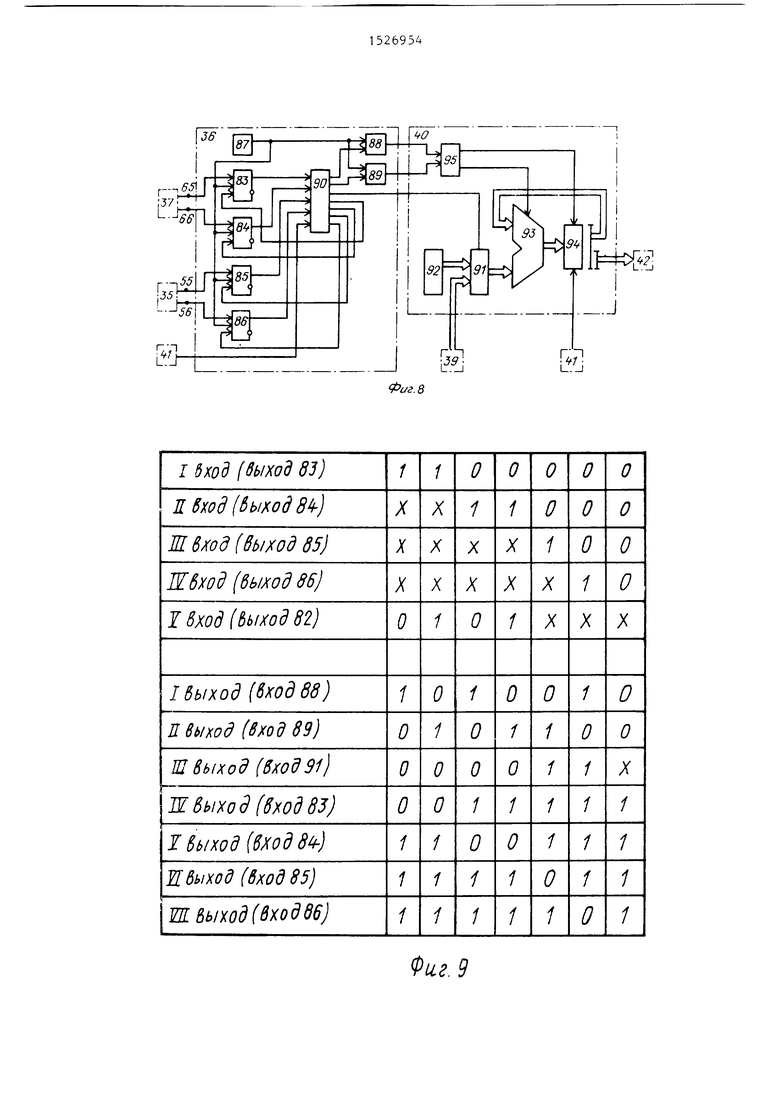
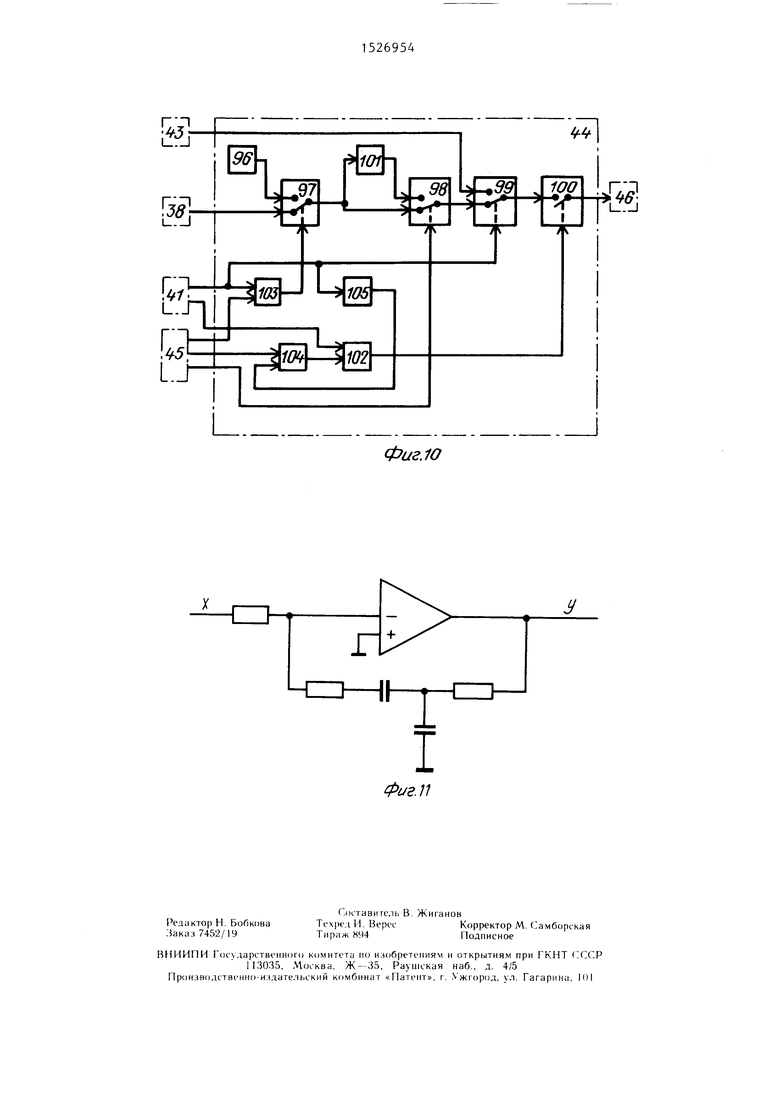
схема блока ввода индикации и памяти коэффициентов; на фиг. 8 - структурная схема блока кодирования и арифметического блока; на фиг. 9 - таблица соответствия вы.ходов с входа.ми шифратора; на фиг. 10 - структурная схема блока коммутации; на фиг. 11 - схема регулятора.
Станок содержит станину 1, в которой установлен привод 2 главного движения, соединенный с помощью клиноременной передачи 3 с первичным валом коробки 4 скоростей вращения шпинделя 5. ИЬщндель 5 посредством ц естерен 6 и 7, вала 8 и упругой муфты 9 связан с валом кругового фотоимпульсного датчика 10, установленного на коробке 4 скоростей. На фартуке 11 установлен привод 12 подачн, который с помощью жесткой муфты 13 связан с центральным валом 14 фартука 11. Вал 14 при включенной электромагнитной муфте 15 через блок шестерен 16 связан с гайкойО1N3
05
со ел
4
шестерней 17, которой жестко закреплен на фартуке 11. Гайкачиестерия 17 охватывает продольный ходовой винт 18, установленный на станине 1 неподвижно, и посредством блока шестерен 16, ,убчатого колеса 19 н вала 20 связана с маховиком 21, а с помощью зубчатого Ko, ieca 22, вала 23 и упругой муфты 24 с налом кругового фотоимпульсного датчика 25. Вал 14 при вк,1Юченпой э.тектромагнитной муфте 26 через ко11нческие шестерни 27, зубчатые Ko. ieca 28 30 связан с винтом 31 понеречпого перемещения, на который насажена гайка 32, ненодвижно закрепленная па рабочем органе станка. На ни1{т ,3 ycia- повлеп маховик 33. Устройство 34 cor;iaco- вання движений резца и загоговки устанавливается на ciaHOK в удобное д.чя у |рав- лепия место.
Станок работает с,1едую1цим образо.м.
10
15
ентов, арифметический блок 40, б,1ок 41 ввода и индикации, цифроаналоговый преобразователь 42, блок 43 регулятора, блок 44 коммутации, блок 45 крестового переключателя, тиристорный преобразователь 46 привода 12 нодачи.
Сшиалы 47 и 48 с выходов датчика 25 поступают соответственно на входы формирователей 49 и 50. Выход формирователя 49 соедипеп с вхол.а.чи одновибрагоров 51 и 52. Выход одновиб)атора 5 соединен с первым входом а.11емента И 53, второй вход которого соединен с пе|)вым входо.м э. 1емеита И 54 н с вых(;дом фо)мирова- теля 50. Выход эле.мента 53 (сигна; 55) и выход элемента 54 (сигнал 5б1 соединены соответственно с первым и вторым входами б,1ока 36 кодирования.
Б.чок 35 )аботает с. образом С, датчика 25 при перемещении paoo ivi;. opi ana приходят две серни с11Г1-:алов 47 и
BpanteHHe от .1е тродвигателя 2 через 20 48, сднн.чугых По фа ( на )(). 1ериод ,нгк.чнноременнук) передачу ,3, коробку 4 скоростей передается шгншделю 5, iij)n (ipa- шепии которого с номошью HiecTcpen fi и 7, вала 8 и упругой муфты 9 врашаегся вал кругового фоп оимпу,1ьсног(о дагчика И), ко- Topbn i выдает информацию устро11ству 34 согласования движений резца и за1Ч)товки. Рабочая подача и быспрое перемещение рабочею органа станка осуш,,1яегся от :(;1ектродвп1 а ге.1я 12. жесгкук) муфту 13 и ва, 1 14, при вк.1|К)ченной лек1рома1- пптной му(|)те 15, пос)едством б.кича шс-сге- реп U), вращение ч.к кгродвигатсля 12 пере дается на вращающуюся г айку-шсчтс|1П1о 17, паходяшуюся в кинематической связи с ходовым винт(П1 18, и вс,1сдствие того что х()Д()во11 ВИ1ГГ лишен возможносгн в)а- шепия и нерсменкмшя в осевом наираи- .чении, неремсмцается гайка.-ш(Ч те)пя 17 и за собой ув,1екаег рабочий орган станка. :-)то обеспечивает режим нродольпо11 но;и1чи как прн точении, гак и при резьбопарезани и, а также продо.ииюе быстрое пс 1сме|цение. 1 lapa,:i,ie.(. вращение от гайки-шестерни 17 с номошью зубчатого ко.песа 22, ва,1а 2:5 и упругой 24 передается на вал кругового фотоимпу,11)С){Ого датчпка 25, ип- формапия от Koropoio iiocTynaei на устройство 34. 11|)и вк.чюченной :)лектрома| ннт- ной муфте 2(i пос)едством зубчатых передач 27 iiO врашенпе электродвигаче.ля 12 передается па винт .31 поперечной подачи. Это обеспечивает )ежнмы поперечпого точения и ноне 1ечно() быстрслч) пе|)сме цення. Продо,11)Ное нсремен1еннс рабочего opiaHa вручную осуществляется от маховика 21, а поперечное от маховика 33. Электронное с(1гласун)шее устро11ство Л4 б. юк 35 формирования снгпалон перемещения рабочего органа станка, блок 36 кодирования, блок 37 формировании ,тов вращения шпипде,пя 5, блок 38 уп)ав- ,ченпя подачей, б,1ок 39 памяти K() -j()i(|)nnn25
30
35
40
.-15
50
47 и 48 COOTRC. тствуо г прохождению рабочим органом станк; 1асс1(.яния а.., HMCiiyc Moro днгкреки 11срс.м.м 1ення сунпор- та. Формпровате, и 4;) и 50 осуществляют фо 1 рование фронтов i coi ласование у)ов- ней сигна.пои 47 и 48 с уровнями ,1огичес- ких сигна.лов цифровых интегральных микросхем. Одновибратор 51 генерирует единичные имн с 1ьсы прн перепаде «Ох «1 сиг- пала 47, а одновпбраюр 52 при перепаде У «() 1, игна;1а 47. 11а выходе з1лемепта 11 53 (сигнал 55, с. 1иничный импу,:|ьс возни кас при (П1 перемеше пш рабочего орг;ч а п; одну дискрету в направлении - Z, прн этом на выходе элемента 54 (cMir- lui.i 56/ имеют логический «О (фиг. 4). На выходе :) И 54 (сигна,:| 56) еднннч- Hbiii импульс возникает п|1и каж;;,ом пере- м(.мцс-нии рабочего органа на одну дискрету в нанравлении +Z, прн атом на выходе а.леме.чта 53 (сш нзл 55) логический «О, (ли ||а,лы 57 и 58 с датчика 10 пшип- де.ля 5 поступают соответствеп1 о на входы ((юрмирователей 59 и 60. Блок 37 содержит одновнбраторы 61 и 62, элемент) И 63 н 64. Эпюры сигналов 57 и 58 ана,л1)гичны эню- рам (ли налов 47 и 48 (фиг. 4), с тем отли чием, что период сигналов 57 и 58 соответствует повороту шпинделя 5 на угол lu,,, называем1 1Й днекретой врашепия пшинделя. ). 1ок 37 работает аналогично блоку 35. На выходе элемента И 63 (сигнал 65) едн- ничный импульс появляется при каждом по- во)оте шпинделя 5 на одну днскрету ю 4ac()Boii стрелке. На выходе элемента И 64 (сигнал 66) при вран1снин шпинделя по часовой ст)елке логический «О. На выходе э.мемента 64 (сигнал 66) единнчпый импульс появ.ляегся при каждом повороте шпинделя 5 против часовой стрелки па одну дискрету. При вран1ении пшипделя против часовой сгрелки на выходе элемента 63 (сигнал )5) - .логический «О.
0
5
ентов, арифметический блок 40, б,1ок 41 ввода и индикации, цифроаналоговый преобразователь 42, блок 43 регулятора, блок 44 коммутации, блок 45 крестового переключателя, тиристорный преобразователь 46 привода 12 нодачи.
Сшиалы 47 и 48 с выходов датчика 25 поступают соответственно на входы формирователей 49 и 50. Выход формирователя 49 соедипеп с вхол.а.чи одновибрагоров 51 и 52. Выход одновиб)атора 5 соединен с первым входом а.11емента И 53, второй вход которого соединен с пе|)вым входо.м э. 1емеита И 54 н с вых(;дом фо)мирова- теля 50. Выход эле.мента 53 (сигна; 55) и выход элемента 54 (сигнал 5б1 соединены соответственно с первым и вторым входами б,1ока 36 кодирования.
Б.чок 35 )аботает с. образом С, датчика 25 при перемещении paoo ivi;. opi ana приходят две серни с11Г1-:алов 47 и
0 48, сднн.чугых По фа ( на )(). 1ериод ,нг5
0
5
0
5
0
47 и 48 COOTRC. тствуо г прохождению рабочим органом станк; 1асс1(.яния а.., HMCiiyc Moro днгкреки 11срс.м.м 1ення сунпор- та. Формпровате, и 4;) и 50 осуществляют фо 1 рование фронтов i coi ласование у)ов- ней сигна.пои 47 и 48 с уровнями ,1огичес- ких сигна.лов цифровых интегральных микросхем. Одновибратор 51 генерирует единичные имн с 1ьсы прн перепаде «Ох «1 сиг- пала 47, а одновпбраюр 52 при перепаде У «() 1, игна;1а 47. 11а выходе з1лемепта 11 53 (сигнал 55, с. 1иничный импу,:|ьс возни кас при (П1 перемеше пш рабочего орг;ч а п; одну дискрету в направлении - Z, прн этом на выходе элемента 54 (cMir- lui.i 56/ имеют логический «О (фиг. 4). На выходе :) И 54 (сигна,:| 56) еднннч- Hbiii импульс возникает п|1и каж;;,ом пере- м(.мцс-нии рабочего органа на одну дискрету в нанравлении +Z, прн атом на выходе а.леме.чта 53 (сш нзл 55) логический «О, (ли ||а,лы 57 и 58 с датчика 10 пшип- де.ля 5 поступают соответствеп1 о на входы ((юрмирователей 59 и 60. Блок 37 содержит одновнбраторы 61 и 62, элемент) И 63 н 64. Эпюры сигналов 57 и 58 ана,л1)гичны эню- рам (ли налов 47 и 48 (фиг. 4), с тем отли чием, что период сигналов 57 и 58 соответствует повороту шпинделя 5 на угол lu,,, называем1 1Й днекретой врашепия пшинделя. ). 1ок 37 работает аналогично блоку 35. На выходе элемента И 63 (сигнал 65) едн- ничный импульс появляется при каждом по- во)оте шпинделя 5 на одну днскрету ю 4ac()Boii стрелке. На выходе элемента И 64 (сигнал 66) при вран1снин шпинделя по часовой ст)елке логический «О. На выходе э.мемента 64 (сигнал 66) единнчпый импульс появ.ляегся при каждом повороте шпинделя 5 против часовой стрелки па одну дискрету. При вран1ении пшипделя против часовой сгрелки на выходе элемента 63 (сигнал )5) - .логический «О.
Блок 38 управления подачей содержит формирователь 67, преобразователь частота - напряжение 68 с линейной характеристикой преобразования, .преобразователь 69 параллельного кода в напряжение.
Блок 38 работает следующим образом. На вход формирователя 67 единичные импульсы поступают с выхода одновибратора 62 блока 37 при вращении щпинделя 5. Частота этих импульсов пропорциональна частоте вращения шпинделя 5 - шшп Формирователь 67 формирует фронты импульсов и придает им необходимые для работы преобразователя 68 амплитуду и длительность. С выхода преобразователя 68 одно- полярное аналоговое напряжение, пропорциональное о), подается на вход опорного напряжения преобразователя код- напряжение 69, на кодовые входы которого подается константа требуемой подачи Z, из блока 39 памяти. Преобразователь 69, работая в первом квадранте, умножает опорное напряжение (выход преобразователя 68) на поступивший с блока 39 код Z и с выхода выдает в блок коммутации од- нополярное напряжение Uy, прямо пропорциональное частоте вращения ншинделя 5 10ЧП1, коду подачи Z,,, которое в режиме точения подается на вход задания скорости системы управления привода 12;
Z r-v
и , K(lJ
При этом /.,, рассчитывается по формуле
Z
fv IKlле /
n
Блок панель 111ифр 1тор 7 72, . лемент
величина требуемой оборотной подачи при точении, мм/об; максимально допустимая для данного станка оборотная подача, мм/об;
разрядность преобразователя 69. 41 ввода и индикации содержит 70 клави1и набора цифр (О-9), кода клавиш, элемент ИЛИ 73 и 74 задержки, четырехразрядный сдвиговый регистр 75, управляемый генератор 76 последовательности импульсов, С шиг ивый регистр 77, дешифраторы 78 двоично-десятичного кода в семисегмент- ный и семисег ментные индикаторы клавишу «Ввод 79, / 5-триггер 80, клавишу «Сброс 81, трехпозиционный переключатель 82 режимов.
Блок 41 работает следующим образом. Нажатие любой цифровой клавиши панели 70 вызывает появление четырехразрядно|-с кода нажагой клавиши на выходе пифра- тора 71 и в.ходах параллельной записи в регистр 75. Одновременно при атом по5
5
является логическая «1 на выходе элемента ИЛИ 72, входы которого по отдельности соединены с выходами всех клавиш панели 70. Этот сигнал задержив;1ется элементом 73 задержки на время вибрации
контактов клавин панели 70, в результате чего он отфильтровывается от вибраций контактов и поступает на вход разрешения параллельной записи в регистр 75 и своим передним фронтом вызывает запись кода на0 жатой клавиши в регистр 75. Тот же сигнал, задержанный на время записи в регистр 75, подается на вход генератора 76, вызывая появление серии из четырех импульсов на выходе генератора 76 с частотой, определяемой быстродействием сдвигающих регистров 75 и 77. Эта серия импульсов, поступая на входы разрешения сдвига регистров 75 и 77;, вызывает сдвиг записанного в регистр 75 четырехразрядного кода нажатой клавиши в младц ие четыре ра:-)0 ряда регистра 77. При следующем нажатии клавип панели 70, в результате описанных действий, в младших четырех разрядах регистра 77 оказывается код вновь нажатой клавиши, в то время, как код ранее нажатой клавиши перемещается в следующие слева четыре разряда регистра 77 и т.д. Таким образом, в регистр 77 заносится код резьбы или подачи, который одновременно индицируется на индикаторах 78, и поступает на адресные входы блока
0 39 памяти, который представляет собой постоянное запоминающее устройство с записанными константами резьб и подач.
Выбор константы резьбы или подачи, соответствующей набранному в регистре 77
с коду, осуществляется дополнительным адресным разрядом блока 39, информация на который поступает с выхода переключателя 82, имеющего три положения, соответствующие режимам работы устройства 34; «Точение, «Правая резьба, «Левая резьба.
0 В положении «Точение на выходе переключателя 82, соединенного с входом блоков 39 и 44,- логическая «1, а в режимах «Правая резьба и «Левая резьба - логический «О. На втором выходе переклю- чате.чя 82 логическая «1 возникает в режиме «Левая резьба, а логический «О в режимах «Правая резьба и «Подача, которые с этого выхода поступают на входы блока 36. Нажатие клавиши «Ввод 79 переводит триггер 80 в состояние «I, нажатие клавиш «Сброс 81 переводит триггер 80 в состояние «О, а также обнуляет регистр 77, выход клавиши «Ввод 79 поступает на блок арифметического устройства, обнуляя при нажатии клавиши 79 выходной регистр арифметического устройства. Выход триггера 80
5 соединен с входом блока 44 коммутации, ра:феп1ая в состоянии триггера «1 подачч сигналов на вход системы управления привода 12.
5
0
7
IJ.ioK .(() содержит четыре ОС-триггера М 86 с иелавиеимой установкой в «1, генератор 87 тактов ых импульсов, два элемента И 88 и 89, Н1ифратор 90. Арифметический б, 1ок 40 содержит маг истра:1ьный коммутатор 91, регистр 92 постоянной намяти (констаит) рабочего органа), сумматор 93, |нмистр 94, схему 9Г) синхронизации и унрав- .тения арифметическим устройством 40.
Б. кж , 56 кодирования и блок 40 работают с, 1едук11ним об)азом. Сигна.гы 55, 56, 65 и 66 с И1)1 ходов блоков 35 и 37, поступая па вход1)1 асинхронной установки в «1 1ригге|)ов 83 85, вызывают установку соответс I iyK)iiuix т|)иг|еров в состояние «1. Выходы триггеров 83 85 (-вязаньг соот- гн тственно с nepiUiiM четвертым входамгг гии(})ра го)а 90, гга пятьгй вход которого егп иа.г «I подается с блока 41 ввода ri пндикации при работе устройства 34 г; режиме «, 1евая резьба, а сиг-нал «О и)и работе Г режиме «11)авая . Каж- дог г комбннапгги па Г(ходах пги(1рат())а 90 coo i г liU T он 1еделепгП)1Й код па вГ)Гходах. 11ояг,ге111н едппппГ) па He)iiOM :, ie- меггга II 88 с ru prtoro ги,гхода Г1гифраго а
90.на )й вход которого ггостуггают тактогм.п. им11у.11)СЬ1 е lenepaTopa 87 с irocTo- ипггогг часгогой, вызг гвает но ггереггаду «О « 1 тактового пмг1улГ)са с .та гч не- ратпра 87 вьгдачу с вьгх{.)да э,1емеггга 88 па г}ход б.гока 95 сиггхронизагинг также пере- ггада «О « U, к()то))ьгй выз1 гвает и арифметическом б, 1оке -И) с.южение содержимого рс г-исг|К1 94 с числом на вьгходе комму г а гора 91 к суммат()1е 93 и заггисьн; fc- з, гьгага суммпрслишггя в рег истр 94. Лпа- .гогично еиг па, 1 на гггором вгиходе riin( - ратора 90, ггоданпьгй на вход улемепга Н 89, второй вход которог о еоеднпен с нГ)Гходом генератора 87, ггри ггерепаде «О « I па libixo.ie renepaiopa в1)Гзьгвает перепад «1 « I гга втором входе б.гока 95 сггнхроппзагиги, чго вьгзьгвает вьгчитание гг.з содержимого регистра 94 числа с выхода коммутатора 91 в сумматоре 93 и пос,:ге- дуюгпук) загнгсь резулг/гага вьгчитапия в ре- г пстр 94. .Логическая «I на третьем ходе гггггфпаго|)а 90, соединепногч) с входом угграв.геггггя коммутатора 91, вызывает чу гга вьгход коммутатора содержимого нтггстра 92 копстанты, а логичесюгй «О па третьем вглходе пгифратора 90, пода- ваемг гй на вход уггравления коммутагора
91, и гзг гвает В1 гдачу на г)ьгход коммута- Tojia 91 кода, П()етуггак1гги го на его гггорой вход с вьгхода б.гока 39 памягтг коэффгг- ггиеггтов.
(дггна, .({} па четвертом выходе пгифратора 90, соедггггеггггом е н,ходом D т|)иг - г ера 83 npir переггаде () на входе С Tpirrrepa 83, соединенном с выходом тактового геггератора 87, вызывает установку т)иггера 83 в соетоя)гие «О. Апа- /гогггчно сигпа.ты «О (га пятом седьмом
26954
8
выходах шифратора 90 вызывают при ггере- ггаде «1 «0 на rxMrefjaiopa 87 установку соответственно тригг-еров 84 - 86 в состояние «О. Шифратор 90 ocyrrtecT- г и. гяет выдачу сиг налов со своггх вьгходов таким образом, чтобьг ггосле ггрихода каж- Д01-0 из сигналов 55, 56, 65 и 66 вынолнить в б. юке арифметическогс.) устройства одно из упомяггутьгх действий, т.е. сложение или вьгчитание из содержимого регистра 94,
О сод.ержггмог о регистра 92 или кода из б.гока 39 гамяти. При это.м ни один ггрггшедпгий сигпа. г .55, 56. 65 и 66 не до.1/ксп 6i)iii) гготе- ряп. Для этого сиггга.ия загюмипаются в триггерах 8,3 86, KOTOjirirM нрисг«я пьг соот.| 5 ветствуюшие коды-ггргго|)итетг 1 (посредс1вом О1греде. геггпой зависимосги Г)Гхо.1он гипф- parojia 90 от ко.мбинании на в.ходах). В)Гс- 111ПЙ код-приоритет нрггснаир ас П Я триг- rt. py, па вход асиггхрог11Г(.)й м аповки г «1 к()го)о|() сиг па, г с б. юкоь .45 и 37 п|)ихо20 Д1ГГ с бо.льшей .максима.()ii частотог, |ак как максгг .1а.1Г|Пая часгота врагнеггия гнггииде. гя 5 бо.гыне максим а.к,по и частогГ) врагнения ггривода 12 рабочего oprajra, го паивг)1сг1гий код-приоритет ггрисвоеп сгггна25 дам с блока 37 ф()рми)()вания сиг палов со ггнгипде.1Я 5. Кодьг-ггр,иоритсты триггеров распо. южеггы по убыванию в следующей ггоследовательности: 83,84,85 и 86. Очередное с.:1ожепие (вг, 1игание) к б.юке 40 начи- нае1ся гго 1 тактового
30 импу.. с вы хота генератора 87 и оггре- де,-1яегся состоянием выходов триггеров 83 86 в этот момент. При этом на всех выхо- чах пгифратора 90, соедгпгенньгх с входами 1) триг 1 еров 83-86, имеется «I, кроме одного выхода, соединеггпого е тем триггером,
35 который па момент ггереиада тактовогч; импульса (гаходится в «1 и имеет пагг|и гсгний код-приоритет и которо.му соответствует сложение (вьгчитангге) в блоке 40. На входе О этого триггера «О и, следо- вате. гьно, по перепаду тактов(;го сиг}га: а этот триггер устанавливается в «О, т.е. снова готов к ггриему им1;у.1ьса па вход асиггхронной установки в «1. Действия, соответствующие сиггга. гам 55, 56, 65 и 66, следующие: сигналу 55 - содержи, Mot регистра 94 минус соде)жимое регистра 92 (постоянно записаггная константа); сиг - гга. гу 56 -- содержимое регистра 94 мгигус содержимое региетра 92.
40
(лгпа.ту 65 в режиме «Правая резьба, задаваемо.м .логическим «О на пятом входе пгифратора 90, поступающего с выхода блока 41, и сиг па. гу 66 в режиме «Левая резьба, задаваемом логической «1 на пятом входе 1Г1иф)атора, соответствует сложение содержимого регистра 94 с константой с выхода блока 39, соответствующей набранному в блоке 41 ввода индикации коду резьбы.
Сигналу 65 в режиме «Левая резьба и сигна. гу 66 в режиме «Правая резьба
соответствует вычитание из содержимого регистра 94 константы с выхода блока 39. При состоянии «О всех триггеров 83-86 в 40 никаких действий не происходит и содержимое регистра 94 не изменяется.
При поступлении «1 на вход установки в «О регистра 94 с к тавиши «Ввод 79 блока 41 ввода индикации регистр 94 обнуляется. X - безразличное состояние входов. Блок 44 содержит регулируемый источник 96 напряжения, аналоговые ключи 97-100, аналоговый инвертор 101, элементы И 102 и 103, элемент ИЛИ 104, элемент НЕ 105. Блок 44 соединен с блоком 45 крестового переклю- чателя, крестовый переключатель которого имеет пять фиксированных положений; , -{-Z, -X, -Z (каждое из которых соответствует направлению перемещения рабочего органа станка) и «Нейтральное (соответствующее неподвижному состоянию рабочего органа в режиме точения). Блок 45 содержит также клавищу «Быстрый ход. На первом выходе блока 45, соединенном первым входом элемента И 103, логическая «1 появляется, когда в блоке 45 нажата кла- вища «Быстрый ход и блок 45 не находится в положении «Нейтральное.
На втором выходе блока 45, соединенном с входом управления ключа 98 имеется логическая «1, если блок 45 в положении -}-Х или . В положении -А , -Z на втором выходе блока 45 - логический «О. На третьем выходе блока 45 логический «О возникает только в положении «Нейтральное крестового переключателя блока 45.
Блок 44 работает следующим образом.
Ключ 97 коммутирует выход блока 38 на вход ключа 98 тогда, когда на вход управления ключа 97 с первого выхода блока 45 подается «О, в противном случае на вход ключа 98 и инвертора 101 коммутируется выход источника 96 напряжения. Ключ 98 коммутирует на вход ключа 99 выход ключа 97, если на вход управления ключа 98 с второго выхода блока 45 подается «1, в противном случае на вход ключа 99 коммутируется выход инвертора 101. Ключ 99 коммутирует на вход ключа 100 выход ключа 98, если на вход управления ключа 99 с выхода переключателя 82 блоку 41 подается «1, в противном случае на вход ключа 100 коммутируется выход блока 43. Ключ 100 коммутирует на вход системы управления привода 12 выход ключа 99, если на вход управления ключа 100 с выхода элемента И 103 подается «1, в противном случае вход разомкнут.
В результате этого на вход задания скорости системы управления привода 12 коммутируется аналоговый сигнал напряжения: с выхода блока 43 регулятора, если переключатель 82 блока 41 в положении
5
0
5
5
«Правая резьба яли «Левая резьба и триггер 80 блока 41 в состоянии «1 (т.е. после нажатия кнопки «Ввод 79 в блоке 41); с выхода блока 38 управления подачей, если триггер 80 блока 41 в состоянии «1, переключатель 82 блока 41 в положении «Подача, крестовый переключатель блока 45 в положении +- . , клавиша «Быстрый ход блока 45 не нажата, что вызывает перемещение рабочего органа в направлении или -Ь2 со скоростью, определяемой величиной напряжения на выходе блока 38; с выхода источника 96 напряжения, если при всех тех же условиях нажата кнопка «Быстрый ход блока 45, что вызывает перем цение рабочего органа в направлении , , со скоростью, определяемой величиной напряжения на выходе источника 96 напряжения; с выхода блока 38 управления подачей с обратным знаком, если триггер 80 блока 41 в состоянии «1, переключатель 82 блока 41 в положении «Подача, крестовый переключатель блока 45 в положении -А , Z, клавиша «Быстрый ход блока 45 не нажата, что вызывает перемещение рабочего органа в направлении -А или -Z со скоростью, определяемой величиной напряжения на выходе блока 38; с выхода источника 96 напряжения, если при всех тех же условиях нажата кнопка «Быстрый ход блока 45, что вызывает перемещение рабочего органа в направлении -А или -Z со скоростью, определяемой величиной напряжения на выходе источника 96 напряжения.
Электронное устройство 34 согласования работает следующим образом.
Перед началом точения необходимо установить переключатель 82 режимов блока 41 в положение, соответствующее выбранному режиму работы станка. Затем клавишами блока 41 в устройство 34 вводится код резьбы или подачи. После его визуального контроля на индикаторах 78 необходимо нажать клавишу «Ввод 79 блока 41, после чего устройство готово к работе.
В режиме точения работают блоки; 37-39, 41, 44 и 45. Точение начинается с установки крестового переключателя блока 45 в требуемое положение ( + А, -А , +Z, -Z). При этом импульсы с датчика 10, преобразуясь в блоках 37, 38 и 44, поданы на вход напряжения задания скорости системы управления привода 12 в виде аналогового сигнала напряжения, что вызывает 0 перемещение рабочего органа в направлении, определяемом положением крестового переключателя блока 45 со скоростью, обеспечивающей набранную в блоке 41 оборотную подачу.
В режиме резьбонарезания работают блоки; 35-37, 39, 40-44. Резьбонарезание, являющееся с точки зрения управления синхронизированным движением щпинделя 5 и рабочего органа, начинается с момента
0
5
11
нажатия клави1ии «Ввод 79 блока 41. В момент нажатия клавиши 79 обнуляется регистр 94 блока 40, после чего импульсы с датчика 10, преобразуясь в блоке 37, поступают на вход блока 36 и вызывают накопление в регистре 94 числа, пропорционального рассогласованию между истинным и желаемым положением рабочего органа, определяемым соотноп1ением угла поворота ппин- деля 5 с расстоянием, пройденным рабочим органом (резьб(шым соотношением), набранным в виде кода в блоке 41. Число в регистре 94, у величиваюохееся с поворотом шпинделя на каждую дискрету, преобразуется в аналоговый сигнал напряжения рассогласования в цифроаналоговом преобразователе 42, работающем в четырех- квадрантно.м режиме (в результате чего учит1)1вается не только величина рассогласования, по и его знак) и подается па вход pei-улятора, представляюшего собой пропорционально-интегрально-дифференциальны и регулятор, в котором в аналоговой форме вычисляется сумма поступившего на вход блока 43 сигнала рассогласования, его интеграла с начала )езьбонарезания и диффе- )енциа. 1а, умноженных на соответствуюпхие коэффициенты. В качестве регулятора возможно использовать известную простую схему на одном онерационном уси,:1ителе. С В1)1хода регу. 1ятора сигнал управления приводом через коммутатор попадает на ход зада ПИЯ скорости привода системы управления привода 12 подачи, вызывая вращение ,чвпгателя и перемещение рабочего opi ana в направ.чении, уменьп1аюп1ем расс()г. :асо- вапие. При этом с датчика 25 начинают ноступать сигналы, которые iioc.ie преобразования в блоках 35 и 36 вызывают вычитание константы, записанной в ре1истре 92, из содержимого регистра 94 при перемещении рабочего органа на каждую дискрету, если при вращении шгшнделя 5 на каждую дискрету происходи г сложение содержимого регистра 94 с константой с выхода блока ;59, и с,:1ожение содержимого регистра 94 с содержимым регистра 92, если вращение шгшнделя вызывает вычитание из регистра 94 консганты с выхода блока 39. В результате этси о начинается переходный процесс, в результате которого при пра- ви.тьном выборе параметров регулятора рассогласование апериодично и быстро (в течение доли иоворота П1пинделя) уменьшается до минимума, определяемого плюс- минус одной дискретой перемеп1ения рабочего органа. Реверс птинделя вызывает обратные процессы, переходный режим, иосле которого рассогласование опять умень- Н1ается до единиц дискрет. При этом ироис- ходит движение рабочего органа в противоположном направлении, а так как отсчет рассогласования начинается с момента нажатия клавиши «Ввод 79 и не нарушается при реверсе, то синхронизация шпинделя и
10
26954
12
рабочего органа не нарушается. Это позволяет неограниченное количество раз производить реверс без потери синхронизации, что в конечном итоге позволяет точить резьбы многими проходами. Режимы «Правая резьба и «Левая резьба отличаются взаимными направлениями движения шпинделя и рабочего органа, а в самом устройстве 34 - знаками констант, участвую- шими в вычислениях (фиг. 9 и 10). Выход из синхронизации, равно как и остановки рабочего органа, осуществляется нажатием клавиши «Сброс 81 блока 40, после чего необходим набор кода, а в случае надобности - режима заново. Точность задания соотношения движений шпинделя 5 и рабочего органа определяется разрядностью констант, участвуюших в вычислениях и арифметического блока 40. При этом на цифроаналоговый преобразователь 42 (фиг. 9) выдаются старшие разряды рассогласования в количестве, определяемом разрядностью преобразователя 42, «1 в младшем разряде этих разрядов соответствует одной дискрете перемещения рабочего органа. Младшие разряды кода рассогласования определяют точность воспро- изнедения соотношения движения шпинделя 5 и рабочего органа. Константа, записанная в регистре 92, может иметь вид 000.... 001000. Константы резьб, записанные в
15
20
25
30
блоке 39 формуле
коэффициентов рассчитьиваются по
7 .2
P-I .„ Jj5
0
5
0
где/г - шаг резьбы, мм/оборот шпинделя;
I цена дискреты шпинделя, оборот цшинделя;
к,.., - цена дискреты линейного переме- цения рабочего органа, мм;
}-2 обозначение перевода в двоичную систему счисления;
празрядность констант и арифметического блока;
т - разрядность цифроаналогового преобразователя с учетом знакового разряда.
Погрешность расчета устройства 34 при нарезании одного витка резьбы рассчитывается (в мм) по формуле
..
Количество разрядов арифметического блока 40 рассчитывается по формуле
5
п т + + Iog4-- - «ном А
где / - максимальная
резьбы, мм; Угмин - максимальный
резьб, мм;
Лмаксимальная суммарная накапливаемая погрешность расчета при нарезании резьбы, мм.
длина нарезаемой шаг нарезаемых
Формула изобретения
1.Токарно-винторезный станок, содержащий станину, привод главного движения, привод подач с парами винт-гайка продольного и поперечного перемещений суппорта, установленного на фартуке станка, и электронное согласующее устройство, содержащее блоки формирования сигналов, входы которых соединены с измерительными преобразователями, блоками ввода и индикации кодов коэффициентов настройки соотноще- ния резьб и подач и блоком памяти коэффициентов, а выходы - с приводами, отличающийся тем, что, с целью упрощения конструкции и повыщения точности обработки, электродвигатель привода подачи продольного и поперечного перемещений суппорта установлен на фартуке, гайка ходового винта продольного перемещения установлена с возможностью вращения в опорах фартука и через кинематическую цепь соединена с электродвигателем подачи к измерительным преобразователям, а ходовой винт закреплен жестко на станине.
2.Станок по п. 1, отличающийся тем, что, с целью упрощения управления и повыщения точности управления обработкой резьб, электронное согласующее устройство снабжено блоком кодирования, арифметическим цифроаналоговым преобразователем,
. коммутирующим переключателем, блоком аналогового регулятора, блоком управления подачей и блоком коммутации, причем входы блока кодирования соединены с выходами блоков формирования сигналов измерительных преобразователей и выходом блока вво0 да и индикации, выходы - с входами управления арифметического блока, информационный вход которого соединен с выходом блока памяти коэффициентов, а выход - с входом цифроаналогового преобразова5 теля, выход которого соединен с входом блока аналогового регулятора, выход которого - с входом блока коммутации, второй вход которого соединен с выходом коммутирующего переключателя, третий вход - с выходом блока управления по0 дачей, вход которого соединен с выходом блока формирования сигналов измерительного преобразователя главного движения, а выход блока коммутации - с входом блока управления подачей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электронные шахматные часы | 1987 |
|
SU1642443A1 |
| Многоканальное устройство для регистрации | 1985 |
|
SU1322156A1 |
| Устройство для программного управления позиционного типа | 1983 |
|
SU1158976A1 |
| Устройство для вычисления параметров диаграмм разрежения индикаторов при исследовании сердечно-сосудистой системы | 1982 |
|
SU1157547A1 |
| Устройство автоматизированной подготовки программ для станков с ЧПУ | 1986 |
|
SU1354160A1 |
| Адаптивное устройство для обучения языкам | 1987 |
|
SU1441445A1 |
| Устройство для управления процессом пропитки текстильного материала | 1987 |
|
SU1506955A1 |
| Система адаптивного числового программного управления металлорежущим станком | 1980 |
|
SU954945A1 |
| Устройство для поиска кадров микрофильма | 1983 |
|
SU1111185A1 |
| Устройство для ввода-вывода информации | 1987 |
|
SU1451674A1 |
Изобретение относится к прецизионным металлорежущим станкам и может применяться в станкостроительной и металлообрабатывающей промышленности. Цель изобретения - упрощение конструкции и повышение точности обработки резьб за счет согласования числа оборотов вращения шпинделя с деталью и перемещения инструмента. Токарно-винторезный станок содержит приводы главного движения и подач. На шпинделе станка и концевом звене кинематической цепи продольной подачи установлены преобразователи перемещений, подключенные к согласующему устройству, которое управляет приводами в зависимости от поступающих сигналов преобразователей. Привод подач содержит электродвигатель, соединенный через муфты и кинематическую цепь с исполнительным органом станка. Для перемещения исполнительного органа станка в продольном направлении электродвигатель, размещенный на фартуке, соединен с вращающейся гайкой, винт которой установлен жестко на станине. Гайка перемещается вдоль винта вместе с фартуком. 1 з.п.ф-лы, 11 ил.
Y
3
1(1
/
15 19 20 2J 17 18 2126 33 /
Ф//г/
28 2, . 2
фиг. З
Фиг.7
Фие.б
1Г.1|
Фиг. 9
/«
tZTJ
Фиг.Ю
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Москва, з-д «Красный Пролетарий им | |||
| Ефремова. | |||
