(Л
t.1
Изобретение относится к устройствам для изменения направления движения безрельсовых транспортных средств а именно для пневмоколесных самоходных шасси и им подобных механизмов.
Цель изобретения - повышение надежности работы.
На фиг. 1 показано устройство для управления транспортным средством, общий вид; на фиг. 2 - форма кривой паза и положение дисков при прямолинейном движении транспортного средства; на фиг, 3 - форма кривой паза и
где р, I рг радиусы-векторы соответствующих частей кривой;
- углы поворота колес транспортного средства, равные углам поворота соответствующих дисков (фиг. 2 и 3).
Так как угол jtij для части кривой паза, описанный уравнением логарифмической спирали, постоянен, jU con8t, соответствующий ему угол |U, между радиусом-вектором и касательной к кривой паза для ее части, которая
| название | год | авторы | номер документа |
|---|---|---|---|
| Рулевое устройство для транспортного средства со всеми управляемыми колесами | 1974 |
|
SU561687A1 |
| Рулевое устройство транспортного средства со всеми управляемыми колесами | 1978 |
|
SU766942A1 |
| Прибор для вычерчивания обводов из дуг логарифмических спиралей | 1978 |
|
SU747744A1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНОГО ДВИЖЕНИЯ ВО ВРАЩАТЕЛЬНОЕ | 2001 |
|
RU2223430C2 |
| УЗЕЛ ЦАПФЫ И ОДНОСТОРОННЕЙ СТУПИЦЫ ПЕРЕДНЕГО УПРАВЛЯЕМОГО КОЛЕСА С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ ТРЁХКОЛЕЙНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С КОМПОНОВКОЙ 2+1 | 2017 |
|
RU2700909C2 |
| ПРЕОБРАЗОВАТЕЛЬ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2012 |
|
RU2486390C1 |
| Способ обработки резанием циклоидальных поверхностей | 1985 |
|
SU1337202A1 |
| Способ возделывания сельскохозяйственных культур на орошаемых полях многоопорными дождевальными машинами кругового действия | 1989 |
|
SU1711713A1 |
| ОБОРОВЫ ПОДНИК»(Чехословацкая Социалистическая Республика) | 1971 |
|
SU297169A1 |
| Всесезонный тундроход | 2016 |
|
RU2628414C1 |

Изобретение относится к устройствам для изменения направления движения безрельсовых транспортных средств, а именно для пневмоколесных самоходных шасси и им подобных механизмов. Целью изобретения является повышение надежности работы. Устройство содержит диски 1 и 2 с пазами 3 и 4, установленные соосно со шкворнями 5 и 6, управляемые колеса 7 и 8. Диски соединены между собой штангой 9, на концах которой размещены ползуны 10 и 11. При вращении рулевого колеса штангу 9 с ползунами 10 и 11 перемещают к центру одного из дисков 1 или 2. Ползуны 10 и 11 передают усилие на стенки пазов 3,4 и поворачивают диски 1,2, а вместе с ними и колеса 7,8. 3 ил.
положение дисков при повороте транс- 15 описывается уравнением логариф- портного средства. ,мической спирали, является величиной
Устройство содержит диски 1 и 2-переменной, |U, var. Он определяется
с профилированными пазами 3 и 4 ив функции угла (.р выражением
установленные соосно со шкворнями 5 и 6 управляемые ходовые колеса 7 и 8, Диски 1 и 2 кинематически соединены
20
|U, агс tg
(()
1+ I sin 2(( )%in
между собой при помощи штанги 9, обаПоследнее получено из уравнений
конца которой оборудованы ползунамиdp,- tg(U,-р, dq ,0,
10 и 11 в профилированных пазах 3 иdpz tgjUj-p2 d(
13 и посредством зубчато-реечной 14 и рулевой 15 передач соединена с рулевым колесом 16 (фиг. )
Уравнение кривой паза получено в
дифференцировании уравнения поворота транспортного средства.
Углы давления предлагаемого уст30 ройства, т.е. углы между направлением движения штанги и направлением действия сил с ползунов на паз и наоборот (углы между радиусом-вектором и перпендикуляром d/2, опущенным
результате совместного решения уравнения поворота транспортного средства -ctg4 ,ctgif - ,
уравнения раооты поворотного устройства
р.(Ч ,)+Рг(Ч г)2ро
И представления уравнения одной по- ловины кривой паза логарифмической спиралью
, р.(О.С,,.7),
(
-p,-arctg ,; ; j )
,
1+
где d - диаметр ползуна.
Угол давления oi для части кривой паза, описьшаемой уравнением логарифмической спирали, меняется незначительно. Так, для jli 70-80
и -L2. 7-10, выбранных по оптималь- d
ным критериям конструкции, при изменении (J, от о до it углы изме1/1)0
няются Б пределах 14-11 .
в функции угла (.р выражением
|U, агс tg
(()
1+ I sin 2(( )%
дифференцировании уравнения поворота транспортного средства.
Углы давления предлагаемого устройства, т.е. углы между направлением движения штанги и направлением действия сил с ползунов на паз и наоборот (углы между радиусом-вектором и перпендикуляром d/2, опущенным
С продолжением радиус-вектора на кривую паза),рассчитываются в функции if с помощью выражений
f
оС I -fUj-arctg
(
;
tg )Ц;
)
,
50
55
1+ -- sin2q -H( )sinVz а d
Минимальные и максимальные величи-, ны углов дaвлeнияoi,4 дин °, ределяются после подстановки значений углов поворота колеса (р и Р которых углы давления проходят через свои экстремальные значения
г.
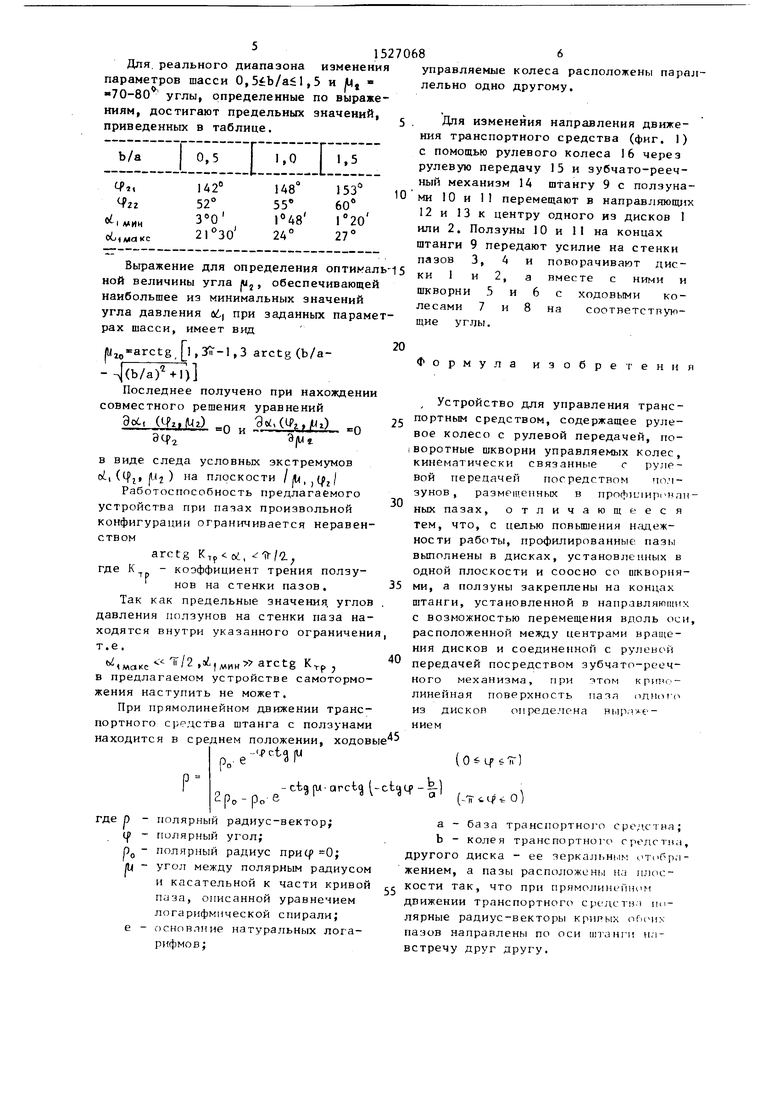
Для. реального диапазона изменения параметров шасси 0,,5 и iHj «70-80 углы, определенные по выражениям, достигают предельных значений, приведенных в таблице.
Выражение для определения оптималь-15 ной величины угла jUj, обеспечивающей наибольшее из минимальных значений угла давления elf, при заданных параметрах шасси, имеет вид
p- arctg 1,,3 arctg(b/a-(b/a)4l)
Последнее получено при нахождении совместного решения уравнений
20
2J
ЭоС, (q z,|Uz.) 9Cf
0
в виде следа условных экстремумов oi, (Cfj, jl(2 ) на плоскости / |U , , ( /
Работосппсобность предлагаемого устройства при пазах произвольной конфигурации ограничивается неравенством
arctg K,, ir/1
где К - коэффициент трения ползу- нов на стенки пазов.
Так как предельные значения, углов давления ползунов на стенки паза находятся внутри указанного ограничени т.е,
Х)лАИН arctg , в предлагаемом устройстве самоторможения наступить не может.
При прямолинейном движении транспортного средства штанга с ползунами
находится в среднем положении, ходовые
- eta |U р„. е 1
Р
2ро-ро
-ctg(u. arctg сЦч --)
де р . f Ро /
полярный радиус-вектор; полярный угол; полярный радиус npHCf 0; угол между полярным радиусом н касательной к части кривой паза, описанной уравнением логарифмической спирали; е - основпние натуральных логарифмов;
0
5
управляемые колеса расположены параллельно одно другому.
Для изменения направлення движения транспортного средства (фиг. I) с помощью рулевого колеса 16 через рулевую передачу 15 и зубчато-реечный механизм 14 штангу 9 с ползунами 10 и 11 перемещают в направляющих 12 и 13 к центру одного из дисков 1 или 2. Ползуны 10 и II на концах штанги 9 передают усилие на стенки пазов 3, 4 и поворачивают дис- , а вместе с ними и и 6 с ходовыми
ки 1 и шкворни 5 лесами 7 щие углы.
и 8
на
косоответстпую20
Формула изобретения
. ,
30
35
40
е
45
Устройство для управления транс- 2J портным средством, содержащее рулевое колесо с рулевой передачей, по- I воротные шкворни управляемых колес, кинематически связанные с рулевой передачей посредством тю.ч- зунов, размещенных в профилируйлн- ных пазах, отличающееся тем, что, с целью повьш ения надежности работы, профилированные пазы вьшолнены в дисках, установле1шых в одной плоскости и соосно со шкворнями, а ползуны закреплены на концах штанги, установленной в направляющих с возможностью перемещения вдоль оси, расположенной между центрами вращения днсков и соединенной с рулевой передачей посредством зубчато-реечного механизма, при этом криволинейная поверхность пазя «тпшч из дископ определена Hi,ip. нием
( &
-7 it-
.0)
а - база транспортного средстна; b - колея транспортного сродстна, другого диска - ее зеркал 1ным (. Тсбра- жением, а пазы расположен1 1 на илос- гс кости так, что при прямолинейном движении транспортного срс ; ст1з,1 полярные радиус-векторы крпрых ofioiix пазов направлены по оси штанг и навстречу друг другу.
Составитель В. Ионова , Редактор А. Мотыль Техред Л.СердюковаКорректор М.Максимипшнец
Заказ 7463/25
Тираж 480
ВНИШШ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Произнодгтпенно-издательскиГ комбинат Патент, г. Ужгород, ул. Гагарина, 101
Фил. I
Ф1Л.У
Подписное
| ОБОРОВЫ ПОДНИК»(Чехословацкая Социалистическая Республика) | 0 |
|
SU297169A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
