лец которой посредством рычага соединен с первым звеном дифференциала, а с целью изменения радиуса вращения кривошипа по закону «осинуса механизм для изменения радиуса .вращения крдвошила состоит из связанной с кривошипом жулисы, цалец которой соединен лосредством рычага со вторым звеном дифференциала.
Блокирующее устройство состоит из шестерни, на которой установлены роликовые копиры, взаимодействующие с роликовым копиром, связанным с одним из приводов, изменяющим положение осей вращения кулис.
Предлагаемое рулевое устройство обеспечивает поворот всех колес шасси на .неограниченный угол так, что продолжения осей вращения колес пересекаются в одной точке, изменение направления движения относительно шасси в диапазоне 360° с сохранением свойств, указанных в п. 1, криволинейное поступательное движение, и, как следствие переч;исленного, рулевое устройство позволяет устанавливать точку пересечения продолл-сения осей вращения колес относительно шасси практически в любой точке.
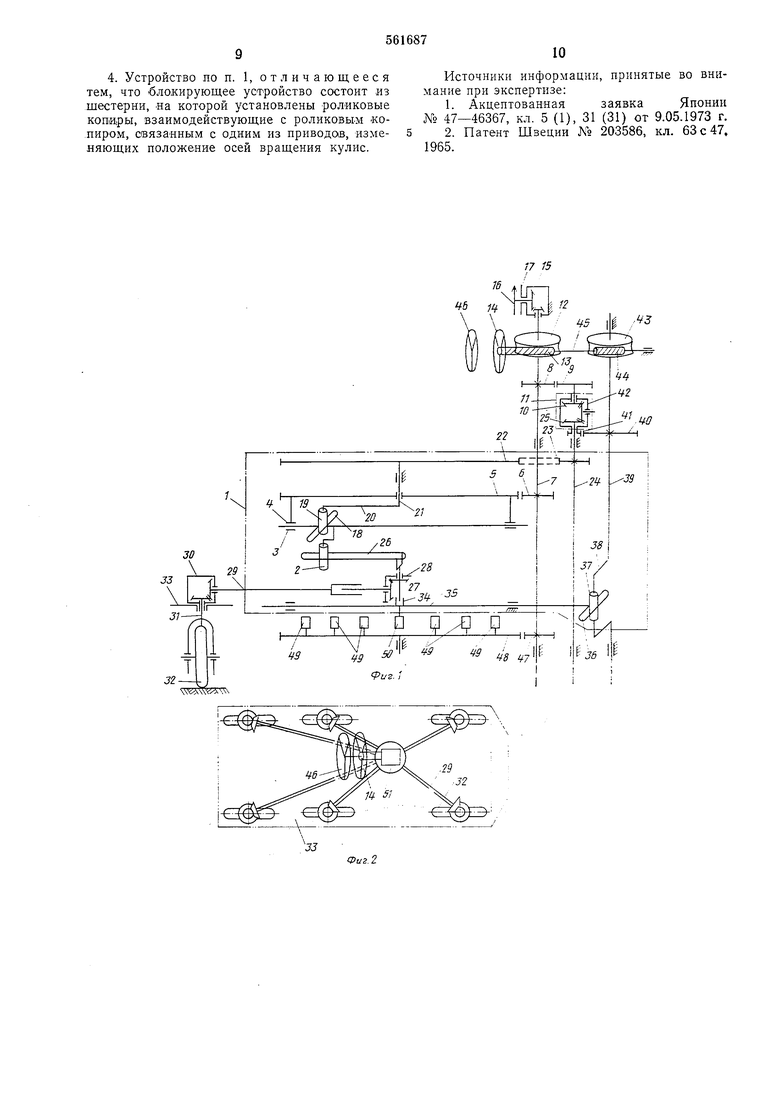
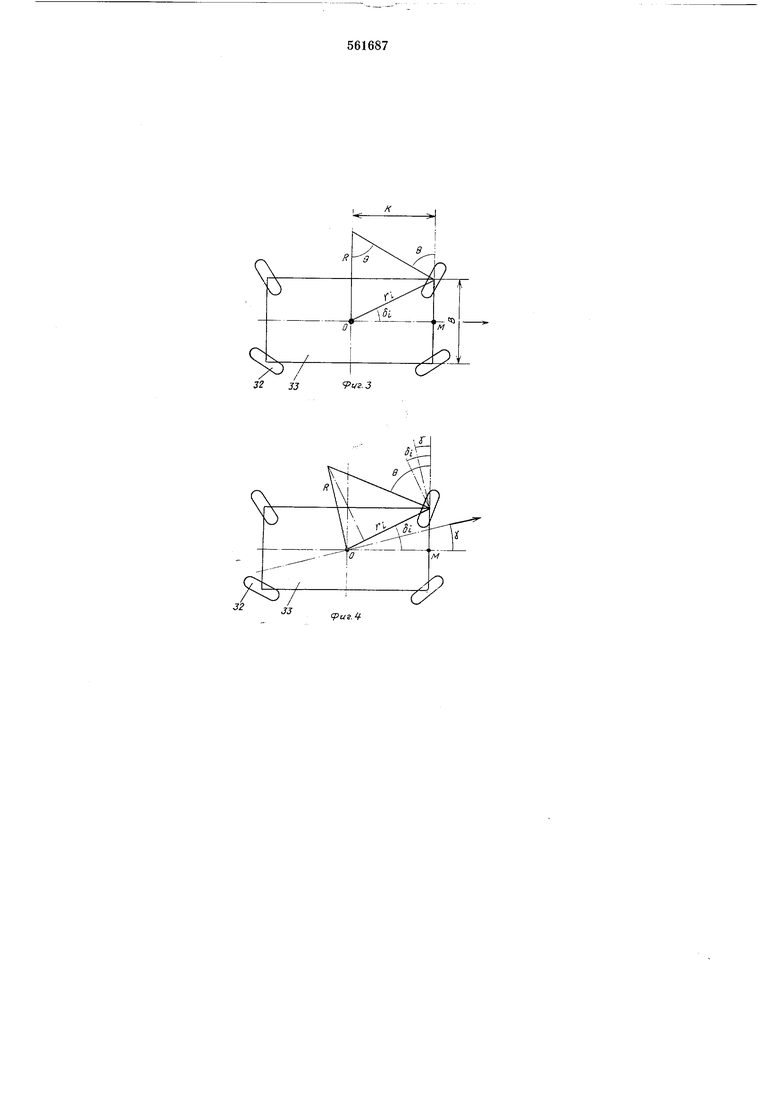
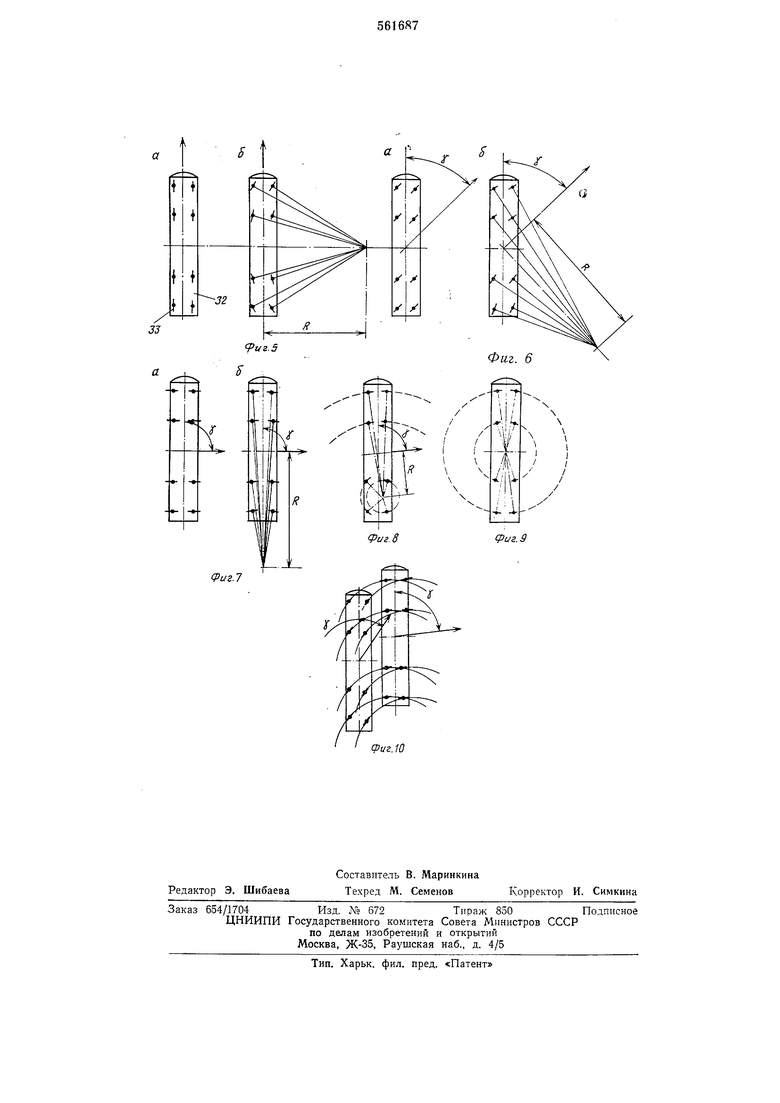
На фиг. 1 - кинематическая схема рулевого устройства; на фиг. 2 - схема шасси с приводами поворота к каждому колесу; на фиг. 3 - схема поворота при вращении основного рулевого вала; на ф,иг. 4 - схема поворота при вращении основного и дополнительного рулевых валов; на фиг. 5-10 показаны различные маневры шасси.
Рулевое устройство состоит из п кривощипио-кулисных механизмов /, где я - число колес. Каждый кривошипно-к лисный механизм поворачивает одно колесо и состоит из пальца 2, скрепленного с кривошипом 3, выполненным в виде ползуна, располол енного в направляющих 4, соединенных с шестеренчатым приводом кривошипа, который включает в себя шестерню 5, взаимодействуюшую с щестерней 6. Шестерня 6 скреплена с ведущим валом 7. Вал 7 соединен с аналогичными приводами кривощипов других кривощипно-кулисных механизмов и связан шестернями 8 и 9 с звеном W дифференциала // и соединен с колесом 12 червячного редуктора, полый червяк 13 которого соединен с основным рулевым колесом 14. Вал 7 через редуктор io связан с указательной стрелкой 16, снабл ;енной неподвижным лимбом 17. Кривошип 5 снабжен механизмом для изменения радиуса вращения кривошила по закону косинуса, включающим в себя кулису 18, скрепленную с кривощипом 3 и взаимодействующую с пальцем 19, соединенным с рычагом 20. Ось 21 рычага 20 скреплена с шестеренчатым лриводом, .включающим в себя взаимодействующие шестерни 22 и 2-3. Последняя скреплена с валом 24, связанным с звеном 25 дифференциала 11, а также соединенным с аналогичными .механизмами других кривошипно-кулисных механизмов. Ось 21 одновременно является осью поворота кривошипа 3. Палец 2
взаимодействует с кулисой 26, ось 27 которой через конический редуктор 28, телесколичеС1К|ИЙ вал 29 и конический редуктор 30 связаны с поворотной осью 31 колеса 32 шасси 33.
Ось 27 кулисы расположена в подшипнике 34, скрепленном с ползуном 35. Ползун 35 снабжен приводом, .изменяющим положение оси вращения кулисы по синусному закону, т. е. изменяющим расстояние между осью 2У кривошипа 3 и осью 27 вращения кулисы 26 от нуля до максимального положительного или отрицательного значения. Соединенная с ползуном 35 кулиса 36 взаи.модействует с пальцем 37 рычага 38, скрепленного с ведущим валом 39, который связан шестернями 40 и 41 с звеном 42 дифференциала 11, а также соединен с червячной шестерней 43, взаимодействующей с червяком 44, который при ломощи валика 45, проходящего через червяк 13, соединен с дополнительным рулевым колесом 46.
С валом 7 скреплена шестерня 47, взаимодействующая с шесте,рней 48, на которой установлены роликовые копиры 49, число которых .равно числу кривошипно-кулисных iMexaнизмов.
На ползуне 35 первого кри.вошипно-кулисного механизма установлен роликовый копир 50, взаимодействующий с копирами 49. Элементы 47, 48, 49, 50 составляют блокирующее устройство.
Как было отмечено выше, валы 7, 24, 39 связаны с аналогичными приводами остальных крийошинно-кулисных механизмов рулевого устройства. Все кривошипно-кулисные механизмы компонуются единым блоком в корпусе , расположенном на шасси. О г корпуса 51 В1ращательное движение телескопическим .валом 29 передается к каждому колесу 32.
Угол поворота колеса имеет следующую зависимость от радиуса поворота.
А
Q arctg -
где К. - расстояние от направляющей точки «О до прямой, соединяющей оси по.ворота колес;
R радиус ловорота; В - колея.
За направляющую точку «О принят полюс относительного вращения шасси. Переходя к полярным координатам, получим другое выражение для угла поворота колеса
r/ cos о/
Qi arctg - Г; sin о/
где: Tj - рассто.яние от направляющей точки О до оси поворота колеса; бг - угол между принятой осью отсчета ОМ и отрезком г,-. Целесообразно за ось отсчета -принимать продольную ось шасси, параллельную преи1мущественному направлению движения. При изменении направления движения относительно шасси на угол у угол поворота колеса можно .представить в следующей зависимости:cos(Si -7) Qi б; + 90° - arc tg --sin(8,-t) Здесь отношение - при изменении paКдиуса поворота от плюс-1Минус бесконечности до нуля изменяется от нуля до плюс- минус бесконечности. Найденное .вы|ражение воспроизводится кривошипно-кулисным механизмом (см. фиг. 1), у которого кулиса 26 поворачивается на угол Q, б; -ь 90° - arc tg - -lliiI:lI -, п - sin (8,. -т) цри повороте кривошипа 5 на угол (б;-у), Где Гтпг - расстояние между осью 27 В:раш,ения кулисы и осью 21 враш,е«ия кривошипа 3, Pi -- радиус Кривошипа, т. е. расстояние от оси 21 вращения до оси пальца 2. бг + 90° угол, на который предварительно повернут каждый кривошип 3 в исходном положении относительно линии перемещения оси 27 кулисы 26, 7 - угол, на который поворачивают кривошип 3. Так как привод, изменяющий положение оси вращения кулисы, состоящий из деталей 35, 36, 37, 38, изменяет величину от нуля до максимального положительного или отрицательного значения, определяемого величиной рычага 38 привода, а привод, изменяющий радиус кривошипа, состоящий из деталей 18, 19, 20, одновременно изменяет радиус криворшипа pi от максимального значения, определяемого рычагом 20, до нуля, то отношение - изменяется от НУЛЯ до плюс бесконечности или от нуля до минус бесконечности. Т. е. изменяется так же как и отношение- в выражении 1. Основное условие дЛ:Я настройки кривошиино-кулисного .механизма - это соблюдение равенства , во всем диапазоне изменения р;А радиуса поворота R шасси. Угол бг и величина рычага 38, равная Гтг (max), определяются после того, как на шасси будут выбраны направляющая точка О и ось отсчета ОМ и определены углы б,- и расстояния г,- от направляющей точки О до оси поворота колеса. После этого для упрощения конструкции рычаги 38 подбираются из условия: а рычаги 20 выполняются одинаковыми. Затем каждый кривошип 3 поворачивают на угол 90° + бг относительно линии перемещения оси 27 кулисы 26, и в этом положении закрепляют на своих валах щестерни 23 и 6. Необходимо отметить, что настройка каждого кривошипно-кулисного механизма ведется по двум параметрам - б; и г,„; (или pi), поэтому взаимное расположение колес на шасси может быть самым различньим. В исходном положении рулевого устройства шасси может двигаться ио прямой вдоль его выбранной продольной оси. При этом все кривошипы 3 и, следовательно, все кулисы 26 повернуты на угол 6i + 90° относительно линии перемещения ее оси 27. В это.м (положении каждый «рлвошип удерживается приводом, состоящим из шестерен 5, 6, который связан с аналогичными приводами других к,ривошипно-кулисных механизмов валом 7 и удерживается от В1ращения колесом 12 и червяком 3. Ось 27 кулисы соосна с осью 2/ кривошипа и в этом положении удерживается приводом, рычаг 38 которого находится в нулевом положении. При этом Гтг равно нулю. Ось 27 кулисы 26 через конический редуктор 28, вал 29, редуктор 30 удерживает плоскость качения колеса параллельно выбранной оси отсчета (в даннол случае продольной оси шасси). Рычаг 20 привода находится в нулевом положении, обеспечивая .ма ксимальную величину радиуса кривошипа. Это положение привода, состоящего из деталей 35, 36, 37, 38 и изменяющего положение оси вращения кулисы, и привода, состоящего из деталей 18, 19, 2(7 и изменяющего радиус вращен:.1я кривошипа фиксируется шестерней 43 и чер.вяком 44. Для изменения направления движения относительно шасси на угол у в кр)1вошипнокулисном механизме необходимо повернуть кулису 26 м кривошип 3, т. е. шестерню 5 на угол у. Это осушествляется поворотом колеса 14. Вращательное движение передается че(рез колесо 12 и червяк 13 ; шестерню 6, и контролируется стрелютй 16 с лимбом 17, указывающей поворот кривошипа 3, кулисы 26 и колеса 32. Рычаг 20 также повернется н-а угол 7- В этом случае для выражения 1 мы имеем: R со ; Г; const; 7 vi. а Qi .i ... Q,, YI. В кривошипно-кулисном механизме рулгвого устройства имеем: Р Ргтах , Г mi 0; 7 71,
7 и .согласно выражению II
Qmi Qmi-t 1 . . . Q,,,fi Vl
Таким образом, осуществляется изменение направления движения относительно шасси на угол от нуля до 360° и криволинейное поступательное движение.
Для осуществления поворота с какимлибо радиусом поворачивают колесо 46. При это.м .повернется вал 39, приведет в движение аривод, изгменяющий положение оси вращения кулисы, состоящий из деталей 38, 37, 35, 35, и через дифференциал 11, вал 24 повернет рычаг 20 привода для изменения радиуса кривошипа, состоящего из деталей 20, 19, 18. Все это приведет к изменению Гтг и р,.
Тогда для кривошипно-кулиеного механизма имеем:
T Ti,
fmi - ma ;Р( рП ;
и согласно выражению II
COS(S; - fj) Qmi 8i + 90° - arctg
- sin (8, - Ti) . РП
Как отмечалось выше, во всех кривошипно-кулисных механизмах соблюдается условие:
mij i
которое всегда обеспечивает пересечение осей вращения колес в одной точке, а радиус поворота шасси будет равен:
Рм г,R-гп i I
Таким образом, осуществляется поворот шасси с радиусом поворота от плюс-минус бесконечности до нуля.
На фиг. 5а и б представлено схематически движение параллельно .продольной оси шасси и поворот в это,м случае. На фиг. 6, 7 а и б - движение относительно продольгай оси шасси под углом v и поворот в этом случае. На фиг. 8 угол у равзн около 87°, а радиус ловарота - R меньше г;, т. е. точка пересечения осей вращения колес находится в районе шасси. На фиг. 9 ,радиус noiBopOTa равен нулю, а шасси вращаться на месте вокруг направляющей точки, при этом направление и скорость вращения регулируются трансмиссией. На фиг. 10 показано криволинейное поступательное движение.
В работе кривошипно-:кулисного механизма при R Г;, т. е. р; г,„; можбт возникнуть такое .положение, когда палец 2 кривошипа 3 займет соосное положение с осью 27 кулисы 26. Это положение характеризуется иеОПределенностью, т. е. в этом положении
кулиса 26 может произвольно поворачиваться на 360°. Для уСтрЯНения этого применено блокирующее устройство, в «отором каждый копир 49 так расположен на шестерне 48,
зацепляющейся с шестерней 47, что прежде, чем в г кривошип«о- кулис.ном механизме наступит неопределенность, он начнет взаимодействовать с колиром 50, закрепленном на ползуне 35 первого кривошиппо-кулисного
механизма. При этом водитель, поворачивая
рулевое .колесо, может ощущать упор, для
устранения которого следует другое рулевое
колесо поверуть на незначительный угол.
Блоки|рующее устройство ограничиваег
установку точки пересечения осей вращгния всех колес в зоне, описываемой радиусом, равным 250-400 мм, вокруг оси 31 поворота каждого колеса.
При использовании /рулевого устройства
на тяжелых шасси необходимо для уменьшения усилия на рулевом колесе и снижения нагрузок на детали кривошипно-кулисного механизма применять сер-вопривод колеса 32, которым должен управлять телескопический
вал 29. В этом случае рулевое устройство выполняет функцию задающего блока.
Формула изобретения
1. Рулевое устройство для транспортного
средства со всем.и уп.ра.вляемыми колесами, содержащее основной рулевой вал, связанный с передаточным .механизмом, включающим кулисы, оси Поворота которых связаны
с осями поворота колес, отличающееся тем, что, с целью повышения маневренности, оно снабжено дополнительным рулевым валом, дифференциалом, кривошипами с механизмами для изменения радиусов вращения
кривошипов, взаимодействующих с кулисами, приводами, изменяющими положения осей вращения кулис, и блокирующим устройством, при этом основной рулевой вал связан с одним звеном дифференциала и с приводами, изменяющими положение осей вращения кулис, второе звено дифференциала связано с механизмами для изменения радиусов вращения кривошипов, а третье з.вено - с дополнительным рулевым валом и с осями врящеиия кривошипов и с блокирующим устройством.
2.Устройство по п. 1, отличающееся тем, что, с целью изменения положения оси вращения кулисы по закону синуса, привод.
изменяющий положение оси вращения кулисы, состоит из ползуна, связанного с кулисой, палец которой соединен посредством рычага с первым звеном дифференциала.
3.Устройство по п. 1, отличающееся тем, что, с целью изменения радиуса кривош.и.па по закону косинуса, механизм для изменения радиуса вращения кривошипа, состоит из связанной с кривошипом кулисы, палец которой соединен посредством рычагп со вторым звеном дифференциала.
4. Устройство по п. 1, отличающееся тем, что блокирующее устройство состоит из шестерни, на которой установлены роликовые копиры, взаимодействующие с роликовы-м «о.пиром, связанным с одним из приводов, изменяющих положение осей вращения кулис.
Источники информации, принятые во внимание при экспертизе:
1. Акцептованная заявка Японии № 47-46367, кл. 5 (1), 31 (31) от 9.05.1973 г. 2. Патент Швеции N° 203586, кл. 63 с 47, 1965.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЫЧАЖНЫЙ ВАРИАТОР | 2011 |
|
RU2467227C1 |
| Зубчато-рычажный кулисный механизм с выстоем ведомого звена | 1979 |
|
SU903628A1 |
| Полуавтомат для обработки деталей по контуру | 1983 |
|
SU1178814A1 |
| КРИВОШИПНО-КУЛИСНЫЙ КЛИНОВОЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ТЕХНОЛОГИЧЕСКИХ МАШИН | 2001 |
|
RU2228266C2 |
| Замкнутая передача | 1990 |
|
SU1763771A1 |
| Зубчато-рычажный вариатор | 1979 |
|
SU868200A1 |
| Замкнутая передача | 1990 |
|
SU1781487A2 |
| Кулисно-рычажный прямолинейно-направляющий механизм повышенной точности и привод для колесных транспортных средств, приводимых в движение мускульной силой человека | 2017 |
|
RU2664852C1 |
| МЕХАНИЗМ (ВАРИАНТЫ) И СПОСОБ ИДЕНТИЧНОГО РУЛЕВОГО УПРАВЛЕНИЯ ТРАПЕЦИЕВИДНЫМ КАЧАЮЩИМСЯ РЫЧАГОМ С РАДИАЛЬНОЙ ТЯГОЙ И МНОГОКОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2020 |
|
RU2760795C1 |
| ФРЕЗЕРНЫЙ СТАНОК | 1994 |
|
RU2082602C1 |
5 п
J . J
ригЛ
сдзцг. 10
