ел
ГС
(Г) (X
Ичобреимпк относи 1Ч я к оп/кичн i |inno- piK Tpot iiHH, и ч;к тио(,-111 к )H( .к-ктро- оп(| 1 ;uiii,i ), II Mo/Ki i бы I ь lU iio. ib.ioEUiно и 11,1 ВЦ га циоины rin-rt VKix и yc i puiic гнах, )1Ц11 i) гии I libiii корпус n. ui конС1 р KIUIII,
I К . ыо iMonpr icHiiH мн. 1яется повышенно гочиости 1 о пк исацпп и,(менений магиети: ia .
На (fill 1 представлена структурная схема компенсационного стро11ства; на фиг 2 сг)кгурпая см ма блока преобразования, па фиг. Лраспо, 1ОЖ(М1не датчиков на
судне: на (fiiir. 4 структурная схема Гхюка 11нтег|п1роиания Kana.ia дагчика во.шового момента.
Компенсационное ус i poi uTBO (фнг 1) содержит дагчик ста гического момента и дагчик 2 во. пюного момента Выход датчика 1 ста I ического моменга через 11ос. 1едова- гельно С()ед1пнч1ныс iiHTerpHfn KJiuyK) схему Л иссушен часгогы блока 4 ннтегрн 1ования, блок п н)еоб 1азован11Я, фи;1ьтр Ь нижиих частот (ФИЧ| подк. кочен к входч суммаю- |ui Г, Выход датчика 2 но.т нового момента через последовательно С1)едии1 ч11Ые интегри- )) cxevu S неременного сигнала м 4)и.1ьтр 9 верхних частог 1ФВЧ), иодк.тю чен к другом} входу суммато|)а 7. Выход с ммаго 1а 7 б.ток К) смещения соединен с входом )е1Л лиро)«)чнс 1Й цепи 11, кот-о|1ая упраиляе :1Лект рическнм тчжом, подаваемым в обмот ки э/1ект|)о аг11ятного компепсагора 12 от исл очника i3 питания
Ь.ток о ;|реоб|1;ионанпя (ijmi 2| канала дагчика I (Латл1чс ско1 о момента -г/дср жнг последова гельно соединенные по.тосовой филы р 14, с ммат о 1 |Г) и демоду.тигор Iti К входу с ммато|)а б. юка ,S п Н об- |1азован11я нодк.почон выход фазоврашате- .тя 17, вход которого соединен с выходом переме11Н01Ч) НсИЦ нжсння источника l.i питания. Выход iiepeMi.Minoro напряжения под- к,тк)чен гакже к вочбужд.ения датчика 1 ста гическо о моменга. Выход постоянного напряжения источника 13 питания под- к.ткянм к входу возбуждения дагчика 2 во.т- нового момеит а.
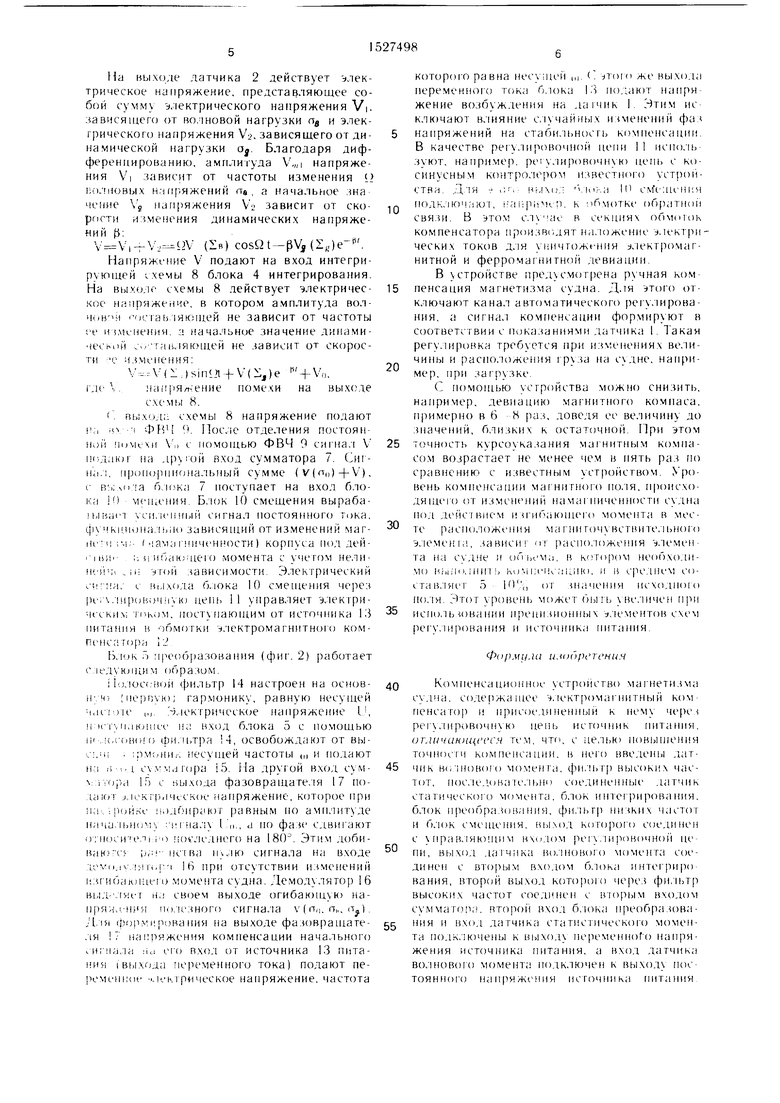
.. 1атчик 1 статического момента и датчик 2 во,Н()вого мо.менга установлены на налчбе IS (фиг. 3) в районе миде.теього сечения судна вдо.ть цснтра.тьион 11родо,1ЬН(Л( ,1иич11 на,туб|,| (в дна метральзной п,тоскости ). /1атчики моменгов соединены с но- MOHUiK) кабе.тя 19 через моду,ть 20 об аботк11 сигна,1ов, кого|1ый :)Лект)онные 6;io ки сг}К)йсгва, и pei )чнук) пень 11 с обмогкамн ч,1ектро.магн1ггного комненс а- тора 12. Комненсагор чстановлен накгоу.а магнитного комнаса 21.
Место yci aHOBKH датчиков выб)ано с чегом того, что в мид1,мевом сечении нан|1я- жения статического и зги б;; к пне го мо.менга принимают наибо.тыпие итачення, а в диаметра.ibiioii H.TOCKOCTTI наименее выраже
0
5
0
5
5
0
5
0
0
5
ны крутящие и местные мехсмшческие напряжения.
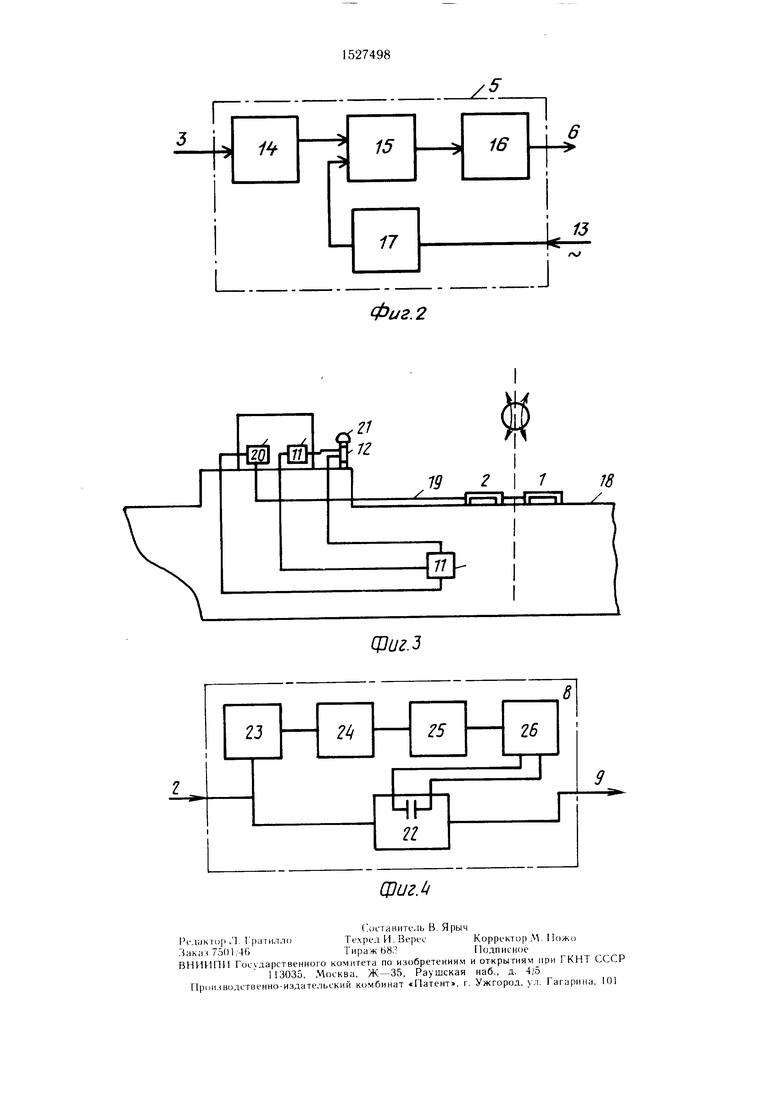
В качестве датчиков моментов используют магд1итоупругие нреобрг.зователи механических напряжений в -.|.( кт 1ичссх :й сншал. Ннтег()ирую1цая схема канала дат чика волнового момента (фиг. 4) содержит интегрирующий усилитель 22 с конденсатором в цепи обратной связи, к входу lajTopor o 11одк.1ючена диффе)енцирук)1иая схема 23. В1) дифференцирующей схемы через гюс .тедовательно соединенн)1е детектор 24 нуля сигнала и генератор 25 одиночных импульсов подключен к вхг;ду к.иоча 2(i Выход клю ча подключен нара, к конденсатору цепи обратной связи ин 1ег 111рую1иего сили- тедя.
Устройство работ-аег с .сдунжи , o; ;i.;i зом.
На датчики 1 и H ij ..i();iioiii, .чl- T OB. уст ановленные на к())г- се судна, ог б.г ка 13 подают на11ря;.ке:{ие иИ У). И а д;- чик I с. татнмс-скО Ч) .и.гйеН ь-1 подан ;т ,;-. нос наги яжение .шч ,цей ча Доть;, а на .тат
чик 2 liO.THOBOrO МОМС1Г1-; IOCT4)iiHiH:C Н.
прялч мше Дат чики ; .ь:ряоп гывак г этектри- чсскис -сигналы, зависящие от механических г:а1;ряжений ( , л,, о), B03i-4iK,uou:ii х в корпусе во ;Д(т1сгвии на него И31И
оаЮПЦ Л О .-ir , i.. КОТО)ЫЙ в o6:,;( C. lV4,i татн : С куН ( п.); t i3i o4av i o l nvio
iio..) (мр I a динамическую (o ) coc гав. яю1ти е В|.1чодные -).тектрическне им..:, чавод| мые в измерительных обмогкач д;.: 41:ков, paFjHbi нрои: .1зодным от магн.итнь;.
ujTo-vOB. возбуждаемых дат чиками н ферро- маг пи гном корпусе судна, но времени На ВЫХОД датчика 1 дейсгвусл -. icK i Г ическое на,1ряжсние IJ, предстан.тяю1Т1ее co6oii сумму сш пала 1. и нача.тьного си1нала Г;,, т орый ;.1.ейс1 вует на в,lxoдe датчика в огсут- сгвип механических н;.чи)яжений,
I U + Г1 v,..,sin,,it -Ml. Амплитуда v,.,, по.тезного cninaiy ави снт ог механических напряжений «т,;, п , ..,, и, ().,|агодаря дифференцированию, ог nerv щей частоты ,,, (часгота питания): ,,,: (,)(п,|, (ig , Of.). Нап()яжение L подают на Р5ход интегратора 3 блока 4 интегрирования. На выходе иитегратора 3 действует злек- т 1ическое напряжение, амплитуда по.тезной составляющей 1.л которого не зависит от частоты (.): U v(n(,, iTg , о | coS(,)t4- ч: С выхода интегратора 3 напряжение li по- сгупает на вход блока 5 |реобра.()ван1т, в которо.м устраняется напряжение начального сишала Ln, высшие нечетные гармоники, присутствующие в напряжении, и выделяется огибающая полезного сигнала V (0|), OB, (т). Да,, с помощью ФНЧ 6 и эгой огибающей выде.чяется постоянная со- став. 1ЯЮ1цая, пропорциональная только механическому напряжению пц, чП|,). Напряжение V ((-(,) подают на вход сумматора 7.
На Bbi.(j;ie латчика 2 действует электрическое напряжение, представляющее собой сумму электрического напряжения V|. зависящего от волновой нагрузки ггд и электрического напряжения V a. зависящего от ди- намической нагрузки oj. Благодаря дифференцированию, амплитуда „,| напряжения Vi зависит от частоты изменения ) полновых напряжений пв , а начальное зна чепие д напряжения Vj зависит от ско- рпсти изменения динамических напряжений Р; ,-OV (Хв) cosQt-pV, (Sgle- .
Напряжл ние V подают на вход интегрирующей схемы 8 блока 4 интегрирования. На Bbix(j,ie схемы 8 действует электричес- кос напряжение, в котором амплитуда вол- | )стаь.1яюп1ей не зависит от частоты ;ч изменения, а начальное значение динамической .. Таиляюпхей не зависит от скорости С аз.мснения:
V:..V(X.)(i;,)e M-Vo.
(дсХ. .:ение поме.чи на вых(;де схс мы 8.
. (.)Д;: схемы 8 напряжение подают .:, io -1 ФНЧ ). После отделения постоян- Hoii V li с номон1ью ФВЧ 9 сигнал V пс.дак) на ()й вход сумматора 7. Си1- на.:. 11|Д)|)ннонал ный сумме ( У(гГ||)-|-V), с R .iAdia п.юка 7 поступает на вход блока iO мспн нии. Б. юк К) смещения выраба- ibiiiari сп.к ииый сигнал постоянного тика. (.{| MKiUHHKi.ii.iid зависяпшй от изменений маг- Hf:ii ;.; ( ь:ама гничениости ) корпуса юд дей- iii;i - г, ii иоак;:це1() момента с учетом нели- , .и: эгой зависимости. Электрический сигна, с -Нгл.чода б.лока 10 смен1ения через |).чр()1м)ч. 1у1) цепь 11 управляет электри- чсскп.; гиком, поступающим от источника 13 питания н обмотки э.чектромагнитного ком- nc-HC. iTo)a 12
1)лок о преобразования (фи1 2) работает спедукяцим образом.
i (. ной фильтр 14 настроен на OCHCJB- пе)); гармонику, равную несущей 4,icv)ie „,. электрическое напряжение I , 1 u Tvпанипсе и;; вход блока 5 с помощью lif . (,г()но. о ф.и, 4, освобождак.)т от вы- c;.iii . 1; )м;.1ии., несущей частоты ,,j и подают H.:I ii ., cy.vMaropa 15. На другой вход сум- N::iYOj )a 1 Г) с ны.чода фазовращате.т 17 по- .uii()T J, 1окг() напряжение, которое при i.. 1 1()й.кс |,)дсмфак)т равным но амплитуде нача. :- М-на; у I n., а но фазе сдвигают |)-гноги ел1 i O .ч()1 лсднего на 180. Этим доби- вакк С ;;, нс1ва сигнала на входе icvii.iv,; ii.j--i 16 при отсутствии изменений цзгибак.ице о MOMCfrra судна. Демодулятор 16 вь|д..ли1-т н,1 своем выходе огибак)П1ук) на- нря;ь Н.пи ii(M. ii. 3Horo сигна. 1а v (n,i, п„, cs). Л (рорми.рова ПИЯ на выходе фазовран1ате- .1я 7 напряжения компенсации начально1Ч) сигнала ci o вход CJT источника 13 питания I вьгхода переменного тока) подают пе- peMCHfioe -.лектр 1ческое напряжение, частота
котор(.)го равна несущей ,,,. (. :iToi(i же выхо.та переменног о тока б.юка 13 но,;ают напряжение возбуждения на да1чик I. Этим не ключают влияние с,|учайных изменений фаз напряжений на стабильность компенсации. В качестве регулировочной цепи 1 1 исп), |ь зуют, напри.мер. pei улировочн к цепь с косинусным контро, 1ером известного устройства. - .; ; иглм. л Vinha 1П с й-:цснпя подключают, аг:рим .-р, к f MOTKe обратной свя.ш. В это.м в секциях (х пююк компенсатора произв(-,дят на.южение э,1ект|1и- ческих токов для уничтожения .ектр()маг- нитной и ферромагнитной девиации.
В устройстве .мот()ена ручная компенсация .магнетизма судна. Д,1я этого отключают кана,1 автг)матического рег лирова- ния, а сигнал компенсации фор. в соответствии с показаниями датчика I. Такая регулировка требуется при и.зменениях ве,1и- чины и распо,-1ожения груза на судне, например, при загрузке.
( помоп1ью усгройства можно снизить, нанример, девиацию магнитного компаса, Г1римерно в 6 8 раз, доведя ее величину до значений, б,1изких к остаточной. При этом точность курсоуказания магнитным компасом возрастает не менее чем в пять раз по сравнению с известным устройством. N po- вень компе)1сапии магнитного по, 1Я, происходящего от измспепий намагпиченностн судна под действием и гипающего момента в месте расно, 1ожения магнигочу вствнте, э.темен1а, .(ависи MI распо.1ожсщ|Я э,темен- та на судне и опьсма, в кот()1ом необходимо HbifhxMuiT ь кимпсмсацню, и в среднем со- став.тиег 5 I l/d от значения исходного по.тя. Этот уровень может быть уве,1ичен при исно.тыовании прецизионных э.тементов схем реглмирования и источника щтання.
Формула илоорстсния
Компенсационнос устройство магнетизма судна. соде 1жащес э,1ектромагнитный ком пенсатор и присос.ьчненный к нем че)сз регу,тир()) цень исгочник гппання, от.и/чакнцесся тем, что, с iie,Ti,K) 11ов1,1111ения точности компенсации, в HCI) введены датчик Bc iHOBoro момента, фпльт) высоких частот, нос,1е.1овате,тьно соединенные .и1тчнк статического момента, б,ток инте ри 1ования, б,1ок п 1еобра.кования, фи, 1ЬГ|) низких частот и б,т()к смещения, вьгчод кот орого соединен с нрав,тяк )щим входом рсгч.тировочной цепи, вьгход .агчпка волнового момента соединен с вто()ым входом б,тока интегрн|)о вания, второй выход которого Hcpe.i фи, высоких частот соединен с вторым входом суммато(1;), BTOpoii вход бл( преобразования и вход датчика статистического момента подк,1ючены к В1,1ход переменного напряжения источника питания, а вход датчика волнового момента подк,тючен к вьгходу пос- тоянног о напряжения источника гп1тапия
; 6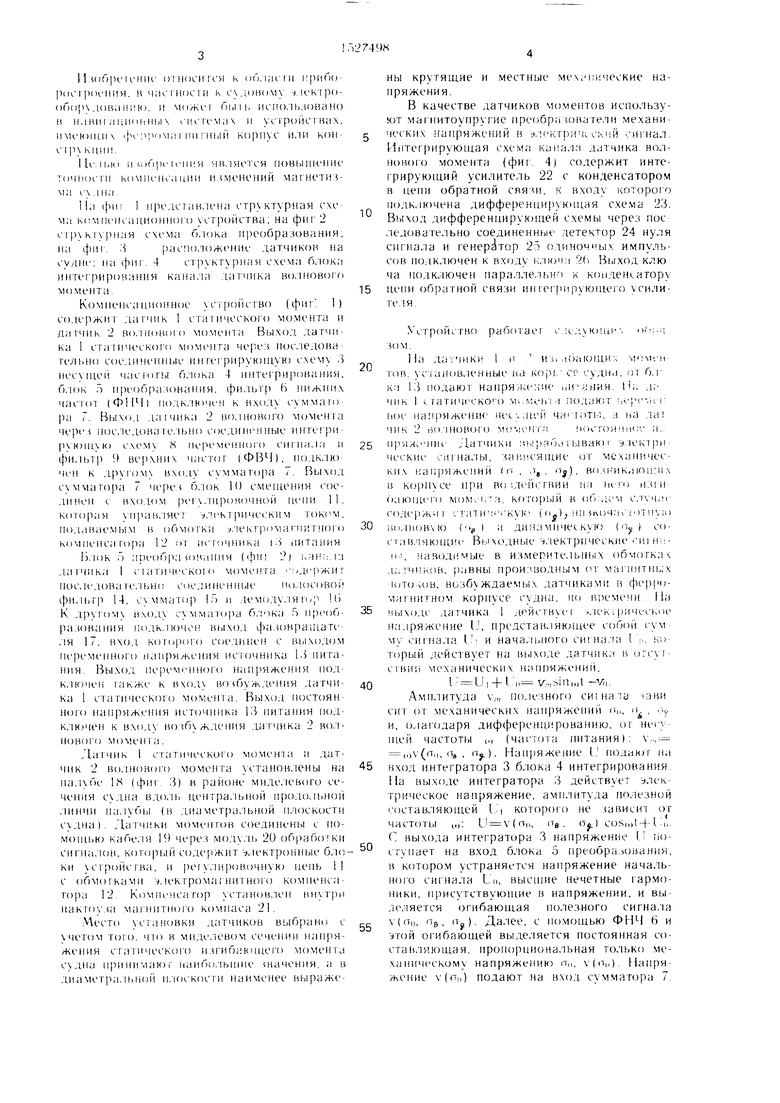
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматической корректировки положения рабочих органов машины для междурядной обработки всходов растений | 1985 |
|
SU1412612A2 |
| Устройство для шовной ультразвуковой сварки полимерных материалов | 1987 |
|
SU1519915A1 |
| Вентильный электродвигатель | 1987 |
|
SU1415347A2 |
| Устройство для управления возбуждением синхронной машины | 1985 |
|
SU1312715A1 |
| Устройство для регулирования тока электродвигателя транспортного средства | 1986 |
|
SU1331679A1 |
| Устройство для измерения магнитного поля | 1973 |
|
SU448405A1 |
| Способ электродуговой сварки с короткими замыканиями дугового промежутка и устройство для его осуществления | 1986 |
|
SU1371821A1 |
| Способ измерения суммарных потерь электрической энергии в высоковольтной линии электропередачи | 1986 |
|
SU1397845A2 |
| Способ сборки резьбовых соединений и устройство для его осуществления | 1988 |
|
SU1504083A1 |
| Устройство для контроля сумматоров | 1985 |
|
SU1312575A1 |
Изобретение относится к области приборостроения, в частности к судовому электрооборудованию, и может быть использовано в навигационных системах и устройствах. Цель изобретения - повышение точности компенсации изменений магнетизма судна. Устройство содержит датчики 1 и 2 статистического и волнового моментов, блок 4 интегрирования, блок 5 преобразования. Кроме того, в состав устройства входят фильтры 6 и 9 верхних и нижних частот, сумматор 7. Регулировочная цепь 11 устройства управляет электрическим током, подаваемым в обмотки электромагнитного компенсатора 12 от источника 13 питания. 4 ил.
23
2i
17
1д
.j
Фиг. 2
сриг.з
25
26
| СТЕНД ДЛЯ ДЕВИАЦИОННЫХ РАБОТ | 0 |
|
SU379450A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кожухор В П., Воронов В | |||
| В., Григорьев В В | |||
| Девиация магнитного компаса | |||
| М.: Транспорт, 1971, с | |||
| Стиральная машина для войлоков | 1922 |
|
SU210A1 |
