Вперед
§
(Л
ел
tN9
со
Од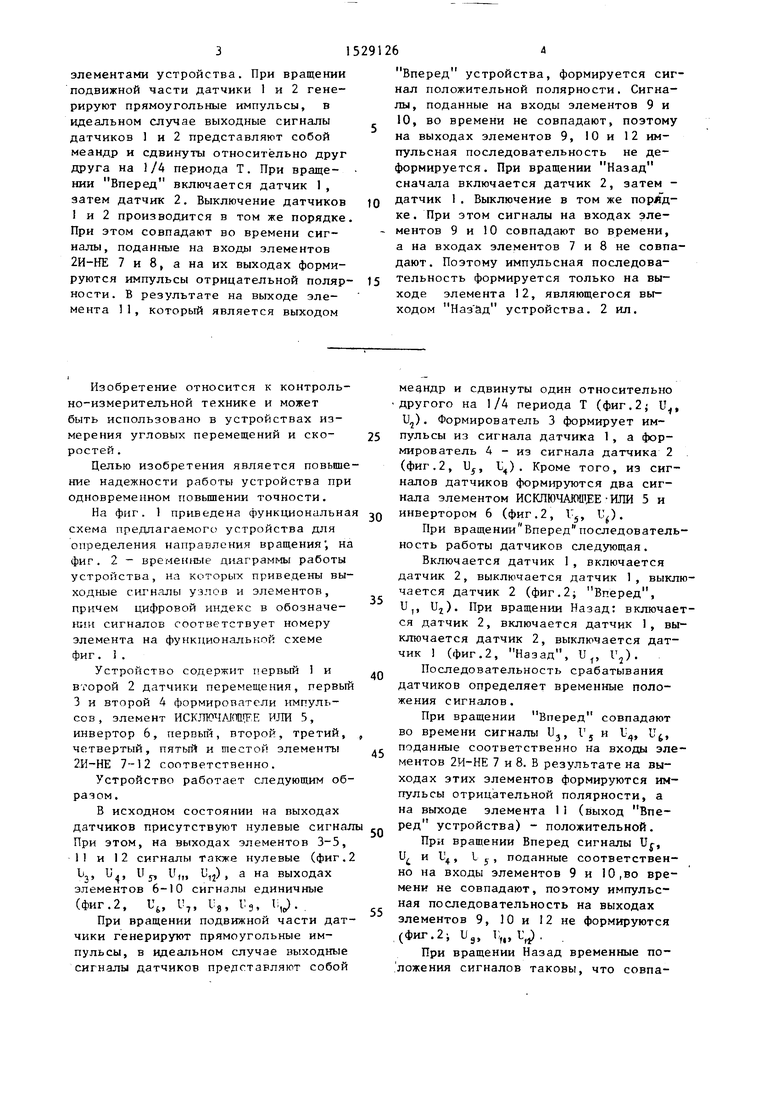
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулируемый конвертор | 1986 |
|
SU1365290A1 |
| ИНФРАКРАСНЫЙ РАДИОМЕТР | 1999 |
|
RU2172476C1 |
| Устройство контроля осадки при контактной стыковой сварке | 1981 |
|
SU961893A1 |
| Устройство для стабилизации частоты вращения электродвигателя | 1989 |
|
SU1686681A1 |
| Устройство для управления частотой вращения ротора асинхронного электродвигателя | 1984 |
|
SU1277343A1 |
| Устройство для автоматического управления линией приготовления многокомпонентных смесей | 1988 |
|
SU1649504A1 |
| Многофазный импульсный стабилизатор | 1984 |
|
SU1196830A1 |
| Система управления стендом для диагностирования технического состояния транспортных средств | 1988 |
|
SU1553875A1 |
| Непосредственный преобразователь частоты | 1986 |
|
SU1584049A1 |
| Устройство для определения направления вращения | 1984 |
|
SU1176253A1 |
Изобретение относится к контрольно-измерительной технике и может быть использовано для измерения угловых перемещений и скоростей. Целью изобретения является повышение надежности и точности работы. В устройство введены шесть элементов 2И-НЕ 7-12 с изменением связи между элементами устройства. При вращении подвижной части датчика 1,2 генерируют прямоугольные импульсы - в идеальном случае выходные сигналы датчиков 1,2 представляют собой меандр и сдвинуты относительно друг друга на 1/4 периода Т. При вращении "Вперед" включается датчик 1, затем датчик 2. Выключение датчиков 1 и 2 производится в том же порядке. При этом совпадают во времени сигналы, поданные на входы элементов 2И=НЕ 7 и8, а на их выходах формируются импульсы отрицательной полярности. В результате на выходе элемента 11, который является выходом "Вперед" устройства, формируется сигнал положительной полярности. Сигналы, поданные на входы элементов 9, 10, во времени не совпадают, поэтому на выходах элементов 9, 10, 12 импульсная последовательность не деформируется. При вращении "Назад" сначала включается датчик 2, затем - датчик 1. Выключение - в том же порядке. При этом сигналы на входах элементов 9 и 10 совпадают во времени, а на входах элементов 7и 8 не совпадают. Поэтому импульсная последовательность формируется только на выходе элемента 12, являющегося выходом "Назад" устройства. 2 ил.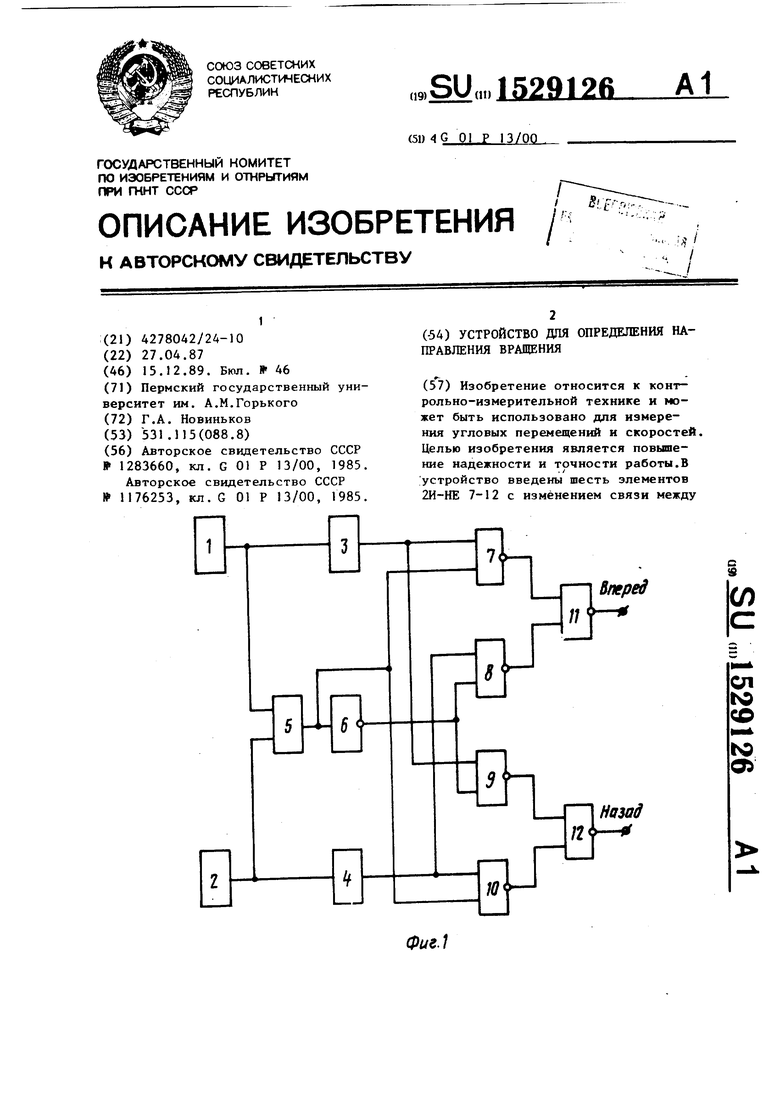
Фиг.Ч
элементами устройства. При вращении подвижной части датчики 1 и 2 генерируют прямоугольные импульсы, в идеальном случае выходные сигналы датчиков 1 и 2 представляют собой меандр и сдвинуты относительно друг друга на 1/4 периода Т. При вращении Вперед включается датчик 1 , затем датчик 2, Выключение датчиков I и 2 производится в том же порядке При этом совпадают во времени сигналы, поданные на входы элементов 2И-НЕ 7 и 8, а на их выходах формируются импульсы отрицательной полярности. В результате на выходе элемента 11, который является выходом
15291264
Вперед устройства, формируется сигнал положительной полярности. Сигналы, поданные на входы элементов 9 и 10, во времени не совпадают, поэтому на выходах элементов 9, 10 и 12 импульсная последовательность не деформируется. При вращении Назад сначала включается датчик 2, затем датчик 1. Выключение в том же порйдке. При этом сигналы на входах эле- - ментов 9 и 10 совпадают во времени, а на входах элементов 7 и 8 не совпадают. Поэтому импульсная последова 5 тельность формируется только на выходе элемента 12, являющегося выходом Наэ йд устройства. 2 ил.
Изобретение относится к контрольно-измерительной технике и может быть использовано в устройствах измерения угловых перемещений и ско- ростей.
Целью изобретения является повышение надежности работы устройства при одновременном повьппении точности.
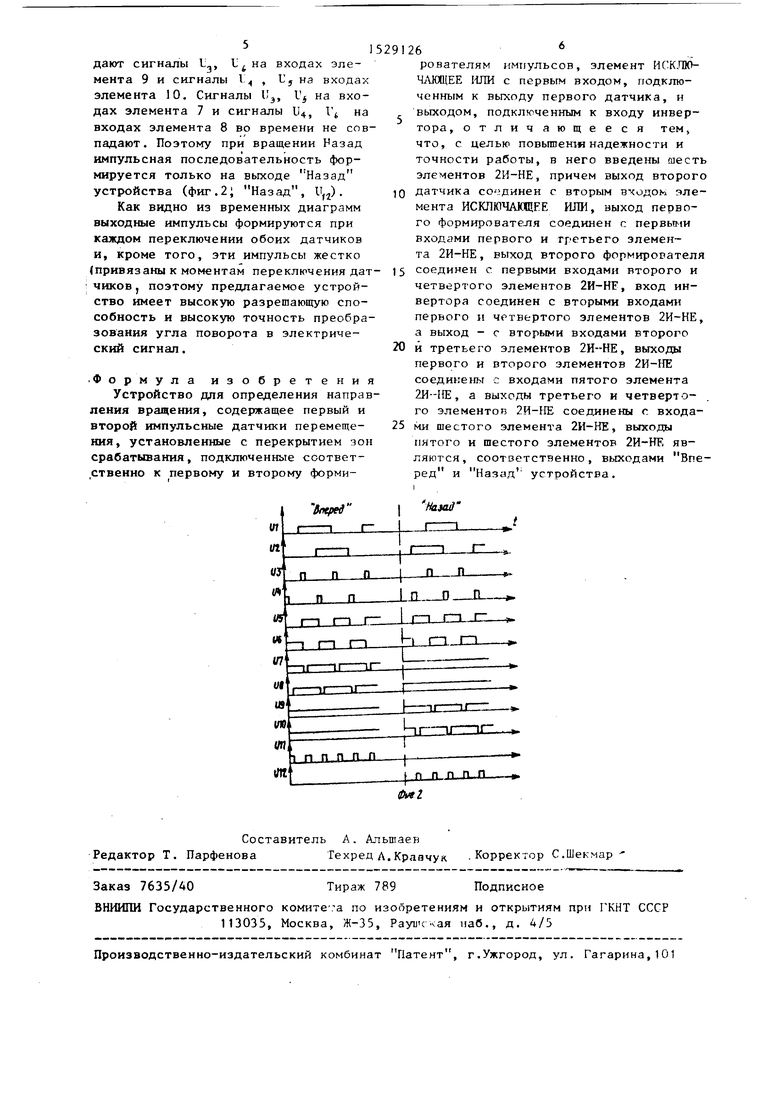
На фиг. 1 пp шeдeнa функциональна схема предлагаемого устройства для определения направления вращения; на фиг. 2 - временные диаграммы работы устройства, на которых приведены выходные сигналы узлов и элементов, причем цифровой индекс в обозначении сигналов соответствует номеру элемента на функциональной схеме фиг. i .
Устройство содержит первый 1 и второй 2 датчики перемещения, первый 3 и второй 4 формирователи ршпуль- сов, элемент ИСКЛЮЧЛКШЩЕ ИЛИ 5, инвертор 6, первьш, второй, третий, четвертый, пятый и тестой элементы 2.И-НЕ 7-12 соответственно.
Устройство работает следующим образом .
В исходном состоянии на выходах датчиков присутствуют нулевые сигнал При этом, на выходах элементов 3-5, 11 и 12 сигналы также нулевые (фиг.2 Ц и, и у, и„, U,j) , а на выходах элементов 6-10 сигналы единичные
(фиг.2, и,, и. 8. 9. ). ,
При вращении подвижной части датчики генерируют прямоугольные импульсы, в идеальном случае выходные сигналы датчиков представляют собой
5
Q
Q
5
меандр и сдвинуты один относительно другого на 1/4 периода Т (фиг.2; U, и). Формирователь 3 формирует импульсы из сигнала датчика 1, а формирователь 4 - из сигнала датчика 2 (фиг.2, и, t). Кроме того, из сигналов датчиков формируются два сигнала элементом ИСКПЮЧАЮШ ;Е ИЛИ 5 и инвертором 6 (фиг.2, 1, U).
При вращении Вперед последовательность работы датчиков следующая.
Включается датчик 1, включается датчик 2, выключается датчик 1, выключается датчик 2 (фиг.2; Вперед, Up Uj). При вращении Назад: включается датчик 2, включается датчик 1, выключается датчик 2, выключается датчик 1 (фиг.2, Назад, U, 1,).
Последовательность срабатывания датчиков определяет временные положения сигналов.
При вращении Вперед совпадают во времени сигналы U, j и 1, U, поданные соответственно на входы элементов 2И-НЕ 7 и 8. В результате на выходах этих элементов формируются импульсы отрицательной полярности, а на выходе элемента 11 (выход Вперед устройства) - положительной.
При вращении Вперед сигналы U, и и и, 5 ггоданные соответственно на входы элементов 9 и 10,во времени не совпадают, поэтому импульсная последовательность на выходах элементов 9, 10 и 12 не формируются (Фиг.21 и,, r,,,,i;. .
При вращении Назад временные положения сигналов таковы, что совпадают сигналы Ц, на входах элемента 9 и сигналы Ц , U, на входах элемента 10. Сигналы и, на входах элемента 7 и сигналы U4, Г на входах элемента 8 во времени не совпадают. Поэтому при вращении Назад импульсная последовательность формируется только на выходе Назад устройства (фиг.2; Назад, и,).
Как видно из временных диаграмм выходные импульсы формируются при каждом переключении обоих датчиков и, кроме того, эти импульсы жестко (привязаны к моментаА переключения дат ;чиков, поэтому предлагаемое устройство имеет высокую разрешающую способность и высокую точность преобразования угла поворота в электрический сигнал.
Ф ° Р м У ла изобретения стройство для определения направления вращения, содержащее первый и второй импульсные датчики перемещения, установленные с перекрытием зон срабатывания, подключенные соответ- .ственио к первому и второму форми5291266
импульсов, элемент ИСК.ПЮ- Ч.ШЦЕЕ ИЛИ с первым входом, подключенным к выходу первого датчика и 5 выходом, подключенным к входу инвертора, отличающееся тем что, с целью повьппенш надежности и точности работы, в него введены шесть элементов 2И-НЕ, причем выход второго 10 датчика соединен с вторым входом элемента ИСКЛЮЧАЩЕЕ ИЛИ, выход первого Формирователя соединен с первыми входами первого и третьего элемента 2И-НЕ, выход второго формирователя соединен с первыми входами второго и четвертого элементов 2И-НЕ, вход инвертора соединен с вторыми входами первого и четвертого элементов 2И-НЕ, а выход - с вторыми входами второго и третьего элементов 2И--НЕ, выходы первого и второго элементов 2И-НЕ соединены с входами пятого элемента -ИЕ, а выходы третьего н четверто- го элементов 2Й-НЕ соединены с входа- ь ми шестого элемента 2И-НЕ, выходы пятого и шестого элементов 2И-НЕ являются, соответственно , выходами Вперед и Назад устройства.
15
| Устройство для определения направления вращения | 1985 |
|
SU1283660A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для определения направления вращения | 1984 |
|
SU1176253A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
