ел
со ю
со
СП
Oi
Изобретение относится к транспорту, в частности к устройствам для регулирования тока тяговых электродвигателей транс- нортных средств.
Цель изобретения - повышение экономичности.
На чертеже представлена структурная схе.ма предлагаемого устройства применительно к электровозу переменного тока.
Тяговые электродвигатели 1 подключены через индивидуальные преобразователи 2 к вторичным обмоткам трансформатора 3, перЕ ичная обмотка коюрого через выключатель 4 соединена с тяговой сетью 5, дающей питание транспортному средству. Б.юк 6 задания тока нодключен к входу счетно-решающего блока 7, к второму входу к()т())ого 11()дк. 1Ючен датчик 8 скорости движения транснортиого средства. Выход блока 7 ссхмииен с входом блока 9 отключения и входом блока 10 коррекции сигнала задания, к второму входу которого подключен блок 6 задания тока. Выход блока 10 подключен к входам эле.ментов 11 сравнений, к д|)у|-им входам которых подключены датчики 12 токов тяговых электродвигателей. Выходы э. 1ементов 11 сравнения через управ- .чяюпше э,-1ементы 13 подключены к входа.м соответствующих индивидуальных преобразователей 2 напряжения, к другим входам которых подключены выходы блока 9 отключения. Блоки 7,9,10 могут быть реализованы на микропронесеоре 14 с соответствующим программированием их функций.
VcTp()iuTBO работает следующим образом.
.а1нинист задает при помощи блока 6 значение гока двиг ателей 1. Это значение ноступает на вход микрон()оцессора 14 и внача, 1е обрабатьп ается счетпо-ре наюшим б, 1оком 7. Этот блок на основе значений li и ф определяет оптимальное количество двигателей tii, которое нужно оставить в работе д.:1Я обеснечения максимума КПД э,1ектровоза. Соотнон1ение этих параметров рассчитано заранее на основе зависимостей КПД от наг1)узки двигателя и заложено в постоянную па.мять микропроцессора 14. F5l)lxoдным сигналом блока 7 является ко, 1нчес гво двигателей Пр; эта величина поступает в блоки 9 и И).
Б,1ок 9 также реализован программны.м об|)азом па микропроцессоре 14. В нем реали- зуегся с, 1едуюший алгорит.м: ненрерывный счет рабочего времени по каждому двигателю отдельно; по получению значения n;i из б,:1ока 7 определяют количество двига- Te. ieii, которое нужно отключить, т.е. пт, п пг; выбирают двигатели с наиболь- П1ИМИ значениями рабочего времени и для них енерируют сигналы запрета (), которые поступают на входы управления соответствующих преобразователей 2, кируя их, г.е. запрещая их включение.
блоБлок 10 также реализован программным образом на микропроцессоре 14, Он вычисляет заданный ток для оставшихся в работе двигателей 1 по формуле
/) -и , Ij ,
так
с током
что электровоз IT
при пр работающих J реализует такую же силу тяги, как и при п работающих двигателя.х с током 1,. Однако потери электроэнергии при этом будут меньше за счет снижения электрических и магнитных нотерь,
Да.чее для каждого из работающих двигателей 1 заданное значение тока поступает в индивидуальный контур регулирования, где элемент 11 сравнения вычисляет разницу
.0
з
л
20 Далее эта разница используется управ- ляюши.м элементом 13 для стабилизации тока ф в цепл соответствующего двига- те,пя 1, чтобы было
0
0
5
0
5
5
5
1)Г.
1ри изменении машинистом заданного тока Ь. рассмотренный цикл повторяется.
Таким образом, в зависимости от заданного тока Ji устройство выбирает такое количество включенных в работу двигателей, чтобы обеспечить минимум потерь энергии при сохранении заданной силы тяги. Заданная нагрузка шрераспределяется по тя- говы.м двигателям и тем самым обеспечивается максимум эксплуатационного КПД.
Формула изобретения
Устройство для регулирования тока тяговых электродвигателей транспортного средства, содержащее индивидуальные преобразователи напряжения тяговых электродвигателей, управляющие входы которых подключены через управляющие элементы к выходам элементов сравнения, одни из входов KOTopbix подключены к датчикам токов тяговых электродвигателей, блок задания тока и датчик скорости движения транспортного средства, отличающееся тем, что, с целью повышения экономичности, оно снабжено блоко.м отключения, блоком коррекции сигнала задания и счетно-решающим блоком, к входам которого подключены датчик скорости транспортного средства и блок задания тока, а к выходу - вход блока отключения и один из входов блока коррекции сигнала задания, другим входом подключенного к блоку задания, а выходом - к другим входам элементов сравнения, нричем выходы блока отключения соединены с другими управляющими входами индивидуальных преобразователей напряжения тяговых электродвигателей.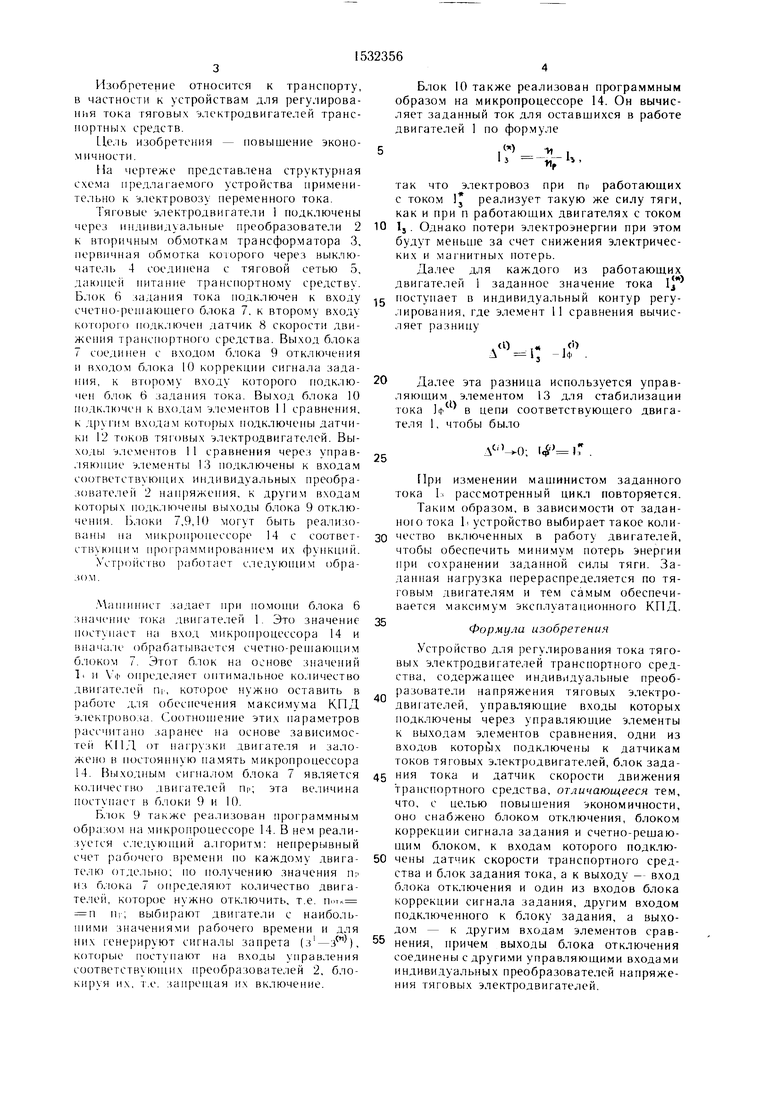
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматизированного регулирования частоты вращения вентилятора электровоза переменного тока | 2023 |
|
RU2819035C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ МОЩНОСТИ ЭЛЕКТРОВОЗА | 2019 |
|
RU2719742C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ В ПНЕВМАТИЧЕСКОЙ СИСТЕМЕ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2283252C1 |
| Устройство для управления тяговым электроприводом электровоза | 1985 |
|
SU1299850A1 |
| АВТОМАТИЧЕСКАЯ КОМБИНИРОВАННАЯ МИКРОПРОЦЕССОРНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ СГЛАЖИВАЮЩЕГО РЕАКТОРА ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2406622C2 |
| СИСТЕМА ВОЗДУШНОГО ОХЛАЖДЕНИЯ БЛОКОВ ПУСКОТОРМОЗНЫХ РЕЗИСТОРОВ | 2010 |
|
RU2465152C2 |
| Преобразователь тяговый электровоза | 2017 |
|
RU2653923C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ТЯГОВОГО ТРАНСФОРМАТОРА ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2280567C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОВОЗОМ ОДНОФАЗНО-ПОСТОЯННОГО ТОКА С ТРАНЗИСТОРНЫМ ПРЕОБРАЗОВАТЕЛЕМ ВОЗБУЖДЕНИЯ | 2023 |
|
RU2824412C1 |
| УСТРОЙСТВО НЕПРЕРЫВНОГО ТЕМПЕРАТУРНОГО КОНТРОЛЯ И АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НАГРУЗКИ СИЛОВОГО ЭЛЕКТРООБОРУДОВАНИЯ ЭЛЕКТРОВОЗА | 2011 |
|
RU2478046C1 |
Изобретение относится к транспорту, в частности к устройствам для регулирования тока тяговых электродвигателей транспортного средства, и направлено на повышение экономичности. Тяговые электродвигатели 1 через индивидуальные преобразователи 2 напряжения подключены к вторичным обмоткам трансформатора 3, первичная обмотка которого через выключатель 4 соединена с тяговой сетью 5, от которой получает питание. По величине сигналов от блока 6 задания тока и датчика 8 скорости движения в блоке 7 по заранее запрограммированным зависимостям определяется числом тяговых электродвигателей, работа которых будет проходить при максимальном КПД. БЛОК 9 ОТКЛЮЧАЕТ ТРЕБУЕМОЕ ЧИСЛО ЭЛЕКТРОДВИГАТЕЛЕЙ, А БЛОК 10 ИЗМЕНЯЕТ СИГНАЛ ЗАДАНИЯ В ПРОПОРЦИИ ОБЩЕГО ЧИСЛА ЭЛЕКТРОДВИГАТЕЛЕЙ К ЧИСЛУ РАБОТАЮЩИХ ЭЛЕКТРОДВИГАТЕЛЕЙ. ЭЛЕМЕНТЫ 11 СРАВНЕНИЯ С ДАТЧИКАМИ 12 ТОКОВ И УПРАВЛЯЮЩИМИ ЭЛЕМЕНТАМИ 13 ПОДДЕРЖИВАЮТ ЗАДАННОЕ ЗНАЧЕНИЕ СУММАРНОГО ТОКА ПРИ МЕНЬШЕМ ЧИСЛЕ ДВИГАТЕЛЕЙ, ОБЕСПЕЧИВАЯ ИХ РАБОТУ С МИНИМАЛЬНЫМИ ПОТЕРЯМИ. 1 П.Ф. 1 ИЛ.
| Устройство для управления тяговым приводом электровоза с двигателями независимого возбуждения | 1982 |
|
SU1079493A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
