Изобретение относится к транспорту, в частности к устройствам автоматического управления тяговым приводом электровоза с тяговыми двигателями постоянного тока независимого возбуждения.
Известно устройство для управления тяговым приводом электровоза с двигателями независимого возбуждения, содержащее задатчики скорости и силы тяги и датчики скорости и тока возбуждения, подключенные к входам регулятора тока возбуждения и якорных токов двигателей, соединенного выходами с входами соответствующих тиристорных преобразователей, датчики якорных токов двигателей, соединенные с входами соответствующих элементов сравнения и входом блока выделения максимального якорного тока, выход которого подключен к другому входу регулятора тока возбуждения и якорных токов двигателей и к другим входам элементов сравнения, выходы которых подключены к входам соответствующих элементов задержки, фазорегуляторы и формирователи импульсов, выходы последних из которых подключены к другим входам тиристорного преобразователя тока возбуждения 1.
Указанное устройство характеризуется недостаточной точностью и низкой устойчивостью из-за отсутствия слежения за положительной полуволной питающего напряжения преобразователя тока возбуждения и нелинейным характером сигнала, гюдаваемого в элементы устройства, управляющих выравниванием якорных токов двигателей.
Цель изобретения - повыщение устойчивости и точности.
Поставленная цель достигается тем, что устройство для управления тяговым приво-. дом электровоза с двигателями независимого возбуждения, содержащее задатчики скорости и силы тяги и датчики скорости и тока возбуждения, подключенные к входам регулятора тока возбуждения и якорных токов двигателей, соединенного выходами с входами соответствующих тиристорных преобразователей, датчики якорных токов двигателей, соединенные с входами соответствующих элементов сравнения и входом блока выделения максимального якорного тока, выход которого подключен к другому входу регулятора тока возбуждения и якорных токов двигателей и к другим входам элементов сравнения, выходы которых подключены к входам соответствующих элементов задержки, фазорегуляторы и формирователи импульсов, выходы последних подключены к другим входам тиристорного преобразователя тока возбуждения, снабжено датчиком полярности напряжения тиристорного преобразователя тока возбуждения, элементами И, блоками умножения и блоком нелинейности, вход которого подключен к датчику тока возбуждения, а выход - к одним из входов блоков умножения, другие входы которых соединены с,выходами соответствующих элементов задержки, а выходы - со входами фазорегуляторов, соединенных выходами с одними из входов элементов И, другие входы которых подключены к датчику полярности напряжения, а выходы -ко входам соответствующих формирователей импульсов.
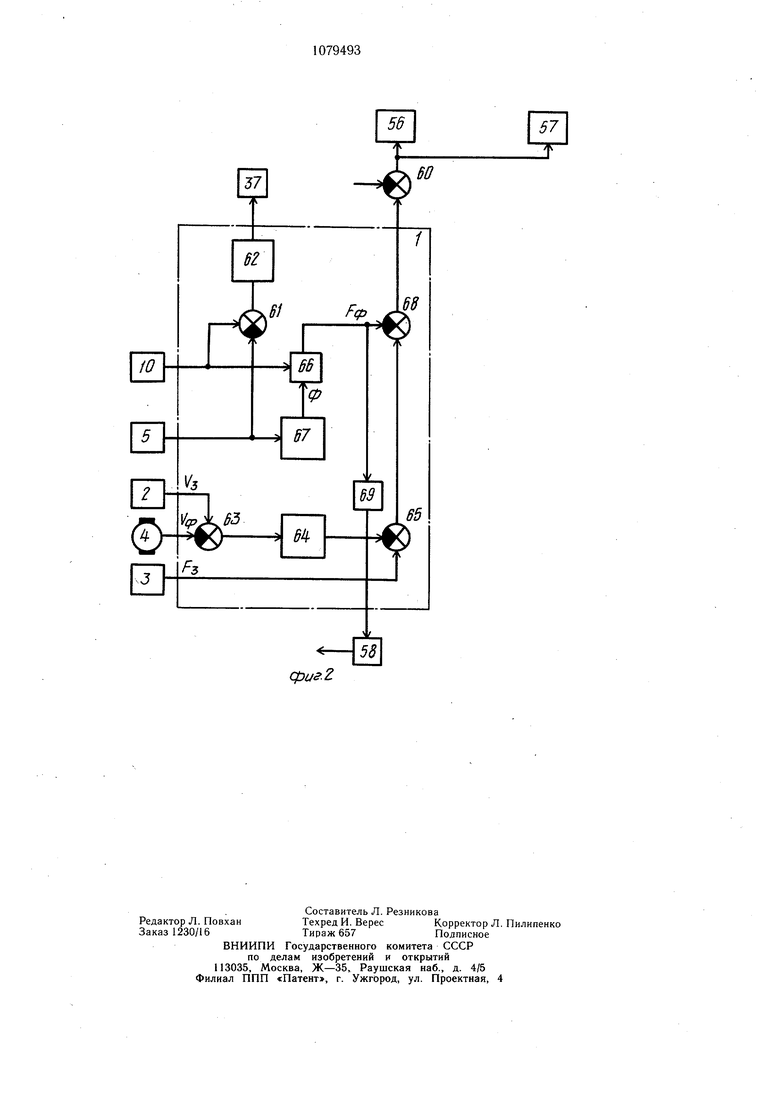
На фиг. 1 представлена блок-схема предложенного устройства для управления тяговым приводом; на фиг. 2 - блок-схема регулятора тока возбуждения и якорных токов двигателей..
Устройство (фиг. 1) содержит регулятор 1 тока возбуждения и якорных токов двигателей, к входам которого подключены задатчик 2 скорости, задатчик 3 силы тяги, датчик 4 скорости и датчик 5 тока возбуждения. Датчики 6-9 якорных токов подключены к входам блока 10 выделения макси, мального якорного тока и одним из входов элементов 11 -14 сравнения. Выход блока 10 соединен с одним из входов регулятора I и другими входами элементов 11 -14 сравнения. Выходы элементов 11 -14 через соответствующие элементы 15-18 задержки соединены с входами блоков 19-22 умножения, другие входы которого подключены к выходу блока 23 нелинейности, соединенного входом с датчиком 5 тока возбуждения. Выходы блоков 19-22 умножения подключены 0 через фазорегуляторы 24-27 к одним из входов соответствующих элементов И 28-31, выходы которых подключены к входам формирователей 32-35 импульсов, а другие входы которых подключены к датчику 36 полярности напряжения тиристочного пре5 образователя 37 тока возбуждения. Преобразователь 37 состоит из управляемого выпрямителя 38, подключенного к тяговому трансформатору 39, и цепочек из резисторов 40-43 и тиристоров 44-47. К выходу выпрямителя 38 подключены после довательно соединенные обмотки 48-51 двигателей, а цепочки из резисторов и тиристоров подключены параллельно каждой обмотке возбуждения.
Якорные обмотки 52-55 двигателей под5 ключены к тиристорным преобразователям 56 и 57, представляющим собой управляемые мостовые выпрямители, подключенные к тяговому трансформатору 39. Входы преобразователей 3-7 и 56 и 57 подключены к регулятору 1, а другие входы преобразовао теля 37 подключены к выходам формирователей 32-35.
Устройство может также содержать переключающий элемент 58, например контакты 5 реверсора, соединенные с одним из выходов регулятора 1 и третьими входами элементов 11 -14 сравнения для перераспределения токов возбуждения двигателей в соответствии с распределением нагрузок на соответствующие колесные пары локомотива в зависимости от направления его движения. Для обеспечения лучшего качества переходных процессов, возникающих от толчков напряжения сети или кругового огня, устройство может быть также снабжено дифференцирующим, элементом 59, подключенным входом к выходу блока 10, и суммирующим элементом 60, входы которого соединены с выходами регулятора 1 и элемента,59, а выход - с входами преобразователей 56 и 57, осуществляющих гибкую отрицательную обратную связь. Регулятор 1 (фиг. 2) содержит первый элемент 61 сравнения, к входам которого подключены датчик 5 и блок 10, а к выходу через фазорегулятор 62 - вход преобразователя 37. К входам второго элемента 63 сравнения подключены задатчик 2 и датчик 4 скорости, а к выходу через нелинейный элемент 64 - один из входов третьего элемента 65 сравнения, другой вход которого подключен к задатчику 3 силы тяги. Входы блока 66 подключены к блоку 10 и через другой нелинейный элемент 67 - к датчику 5, а выход - к одному из входов четвертого элемента 68 сравнения, другой вход которого соединен с выходом третьего элемента 65 сравнения. Выход элемента 68 подключается к входам преобразователей 56 и 57 через суммирующий элемент 60. Выход блока 66 может быть подключен через делитель 69 напряжения к контактам переключающего элемента 58. Устройство работает следующим образом. От силового трансформатора 39 электропитание подается на якорные обмотки 52- 55 тяговых двигателей через преобразователи 56 и 57. Одновременно от этого же трансформатора 39 лолучают питание обмотки 48-51 возбуждения указанных двигателей, соединенные последовательно через преобразователь 37. Для компенсации разброса характеристик тяговых двигателей с независимым возбуждейием и диаметров бандажей колесных пар в устройстве служат резисторно-тиристорные цепочки, состояние из последовательно соединенных резисторов 40-43 с соответствующими тиристорами 44-47 и включенные параллельно каждой из обмоток 48-51 возбуждения. Путем автоматического регулирования угла открытия тиристоров 44-47 изменяется ток в этих цепях, а соответственно изменяется ток в обмотках 48-51 возбуждения каждого тягового двигателя, обеспечивая тем самым равенство якорных токов. Формирование управляющих импульсов для тиристоров 4447 щунтировки поля осуществляют соответствующие формирователи 32-35 импульсов. Входными сигналами для этих формирователей являются выходные сигналы элементов и 28-31, которые действуют по сигналам фазорегуляторов 24-27, но под контролем датчика 36 полярности напряжения, т.е. при положительной полуволне напряжения на обмотках 48-51 возбуждения. Это обеспечивает устойчивость системы регулирования, так как исключает подачу управляющих импульсов на тиристоры 44-47 при отрицательном напряжении на ях анодах. В свою.очередь, управляющие сигналы на фазорегуляторы 24-27 поступают от блоков 19-22 умножения, которые являются регуляторами усиления и совместно с блоком 23 нелинейности обеспечивают регулирование коэффициента усиления системы в зависимости от степени насыщения главных полюсов тяговых двигателей. В результате обеспечивается близкая к линейной зависимость этого коэффициента от тока возбуждения, а соответственно и устойчивость во всем диапазоне регулирования. Зависимость коэффициента усиления от токов якорей заведена через блок 10, где выделяется максимальный сигнал от наиболее нагруженного тягового двигателя и подается рдновременно на вход регулятора 1 и на суммирующие входы элементов 11 -14 сравнения токов, на вычитающие входы крторых поступают сигналы от каждого тягового двигателя с датчиков 6-9 якорных токов. Сигналы, пропорциональные рассогласованию якорных токов, вырабатываемые элементами 11 -14, сравнения, поступают через элементы 15- 18 задержки на вторые входы .блоков 19- 22 умножения, чем осуществляется в конечном итоге выравнивание токовых нагрузок между тяговыми двигателями. Элементы 15-18 задержки позволяют исключить влияние процессов боксования колесных пар на качество регулирования.,При этом длительность задержки сигналов определяется временем действия защиты от боксования. Управление преобразователями 56 и 57 и выпрямителем 38 осуществляется по сигналам от регулятора 1, получающего необходимые сигналы от всех датчиков токов и скорости, пропорциональные соответственно якорным токам, токам возбуждения и частоте вращения колесных пар, а также от задатчиков скорости и силы тяги. На элементе 61 (фиг. 2) сравнения задается начальный ток возбуждения, который фазорегулятор 62 обеспечивает путем соответствующего управления преобразователен 37. При появлении тока якоря появляется соответствующий дополнительный сигнал на выходе элемента 61, а соответственно уменьшается угол управляющего импульса на выходе фазорегулятора 62, ток возбуждения увеличивается пропорционально увеличению тока якоря. На выходе нелинейного элемента 67 формируется сигнал, пропорциональный магнитному потоку тяговых двигателей. После
перемножения этого сигнала в блоке 66 с сигналом по току якоря получаем сигнал, пропорциональный силе тяги электровоза Рф. Этот сигнал сравнивается в элементе 68 с заданным значением силы тяги Fj, который поступает от задатчика 3 через элемент 65. Разница между Fj и ф через суммирующий элемент 60 поступает на входы преобразователей 56 и 57. Сравнение фактической скорости Уф и заданной Vj осуществляется на элементе 63, и в случае превыийения фактической скорости над заданной выделенный через нелинейный элемент 64 сигнал поступает на вычитающий вход элемента 65, обеспечивая снижение сигнала задатчика силы тяги. В этом случае сигнал, пропорциональный фактической силе тяги F через делитель 69, параметры которого определяются явлением «опрокидывания кузова {механической догрузкой задних осей и разгрузкой передних от силы тяги на автосцепке), поступает через контакты переключающего элемента 58 (вперед или назад) на элементы сравнения токов И -14 (фиг. 1), через которь.ге осуществляют перераспределение сиЛ тяги каждой оси.
В случае возникновения какого-либо сложного переходного процесса, например толчок напряжения сети или «круговой огонь по коллектору тягового двигателя, на выходе блока 10 выделения максимального якорного тока интенсивно нарастает выходной сигнал, который выделяется элементом 59 и через суммирующий элемент 60 вводится с отрицательным знаком в цепи управления преобразователей 56 и 57. Таким образом обеспечивается необходимое снижение напряжения питания якорей тяговых двигателей.
В зависимости от направления движения электровоза через соответствующие контакты переключающего элемента 58, например блокировочные контакты реверсивного переключателя, с дополнительного выхода регулятора 1 на дополнительные входы элементов 11 -14 сравнения токов поступает сигнал, пропорциональный -силе тяги. Этот сигнал вводит небаланс токов якорей, обеспечивая перераспределение сил тяги каждой оси пропорционально давлению колесных пар на рельсы, т.е. обеспечивается компенсация отрицательного влияния эффекта «опрокидывания кузова при тяге.
Экономическая эффективность предлагаемого тягового привода складывается из снижения электрических потерь и повыщения провозной способности локомотива, что достигается путем повыщения устойчивости и точности регулирования, достигнутого за счет слежения за полярностью напряжения на обмотках возбуждения и выдачи управляющих импульсов, обеспечивающих предельное по сцеплению распределение сил тяги между осями. Кроме того, повыщение эффективности предлагаемого устройства происходит за счет снижения износа рельсов и бандажей колесных пар, экономии песка, что достигается благодаря оптимизации распределения сил тяги между осями, введения динамической жесткости тяговой групповой характеристики. Повыщение надежности достигается вследствие введения гибкой отрицательной обратной связи по току якорей тяговых двигателей на выпрямленное напряжение.
Устройство обеспечивает точность регулирования, улучщение использования сцепного веса, как показали испытания опытных образцов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления тяговым приводом электровоза с двигателями независимого возбуждения | 1988 |
|
SU1646921A2 |
| Устройство для управления тяговым приводом электровоза с двигателями независимого возбуждения | 1988 |
|
SU1595707A2 |
| Устройство для выравнивания нагрузок тяговых электродвигателей подвижного состава | 1985 |
|
SU1232521A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТЯГОВЫМ ПРИВОДОМ ЭЛЕКТРОВОЗА ПЕРЕМЕННО-ПОСТОЯННОГО ТОКА | 1990 |
|
RU2026209C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ И СИЛ ТЯГИ И ЭЛЕКТРИЧЕСКОГО ТОРМОЖЕНИЯ МНОГОСЕКЦИОННОГО ЭЛЕКТРОВОЗА | 1995 |
|
RU2099210C1 |
| Устройство для автоматического регулирования тормозной силы электроподвижного состава | 1976 |
|
SU651988A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ ЭЛЕКТРОВОЗА ПЕРЕМЕННОГО ТОКА | 1990 |
|
RU2013231C1 |
| Регулятор мощности тяговых электродвигателей подвижного состава | 1980 |
|
SU965822A1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2539631C1 |
| Устройство для автоматического регулирования токов тяговых двигателей электровозов | 1978 |
|
SU709417A1 |

УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТЯГОВЫМ ПРИВОДОМ ЭЛЕКТРОВОЗА С ДВИГАТЕЛЯМИ НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ, содержащее задатчики скорости и силы тяги и датчики скорости и тока возбуждения, подключенные к входам регулятора тока возбуждения и якорных токов двигателей, соединенного выходами с входами соответствующих тиристорных преобразователей, датчики якорных токов двигателей, соединенные с входами соответствующих элементов сравнения и входом блока выделения максимального якорного тока, выход которого подключён к другому входу регулятора тока возбуждения и якорных токов двигателей и к другим входам элементов сравнения, выходы которых подключены к входам соответствующих элементов задержки, фазорегуляторы и формирователи импульсов, выходы последних подключены к другим входам тиристорного преобразователя тока возбуждения, отличающееся тем, что, с целью повышения устойчивости и точности, оно снабжено датчиком полярности напряжения тиристорного преобразователя тока возбуждения, элементами И, блоками умножения и блоком нелинейности, вход которого подключен к датчику тока возбуждения, а вы.ход - к одним из входов блоков умножения, другие ды которых соед-инень с выходами соответ(Л ствующих элементов задержки, а выходы - с входами фазорегуляторов, соединенных выходами с одними из входов элементов И, другие входы которых подключены к датчику полярности напряжения, а выходы - к входам соответствующих формирователей и.М пульсов. CD 4;: 00 со
фиеА
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Головатый А | |||
| Т | |||
| и др | |||
| Независимое возбуждение тяговых двигателей электровозов | |||
| М., «Транспорт, 1976, с | |||
| Скоропечатный станок для печатания со стеклянных пластинок | 1922 |
|
SU35A1 |
| Машина для разделения сыпучих материалов и размещения их в приемники | 0 |
|
SU82A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
