Предлагаемое изобретение относится к области проектирования гидроакустических лагов, позволяющих измерять скорость корабля относительно грунта (абсолютную скорость), и направлено на повышение точности их работы в реальных условиях эксплуатации. Основным параметром этих лагов является точность измерения скорости корабля. Однако указанные лаги могут обеспечить высокоточное измерение абсолютной скорости лишь в определенных условиях работы. В связи с этим весьма актуальными являются поиски решений, расширяющих область внешних условий (диапазон скоростей, глубин под килем, допустимых углов качки и др.), при которых обеспечивается заданная точность измерения скорости. При этом особенно важное значение приобретает задача компенсации неосредняемых систематических погрешностей, которые проявляются в тех или иных условиях работы лага. В частности, в упомянутом лаге по авторскому свидетельству №1840717, являющемся прототипом для предлагаемого изобретения, с целью компенсаций систематической погрешности, обусловленной смещением спектра эхо-сигнала при работе на больших глубинах под килем, в схему лага введен блок выработки поправки. Однако проведенные в последнее время на предприятии исследования показали (3), что систематическая погрешность измерения скорости возникает также и при работе гидроакустического лага в условиях качки корабля. Учет такого рода ошибки во всех известных авторам лагах не производится. Согласно изобретению поставленная задача решается дополнительным введением в состав аппаратуры лага схемы выделения допплеровской частоты, обусловленной вертикальным перемещением корабля на реальном волнении, и умножителя, на другой вход которого поступает информация о текущем значении углов качки. Физическая сущность систематической ошибки, возникающей при работе лага на качке, поясняется ниже. В известных гидроакустических лагах для уменьшения влияния кренов и дифферентов корабля на точность измерения используется четырехлучевая антенна (типа ЯНУС), а алгоритм обработки сигналов в четырехканальном приемном тракте предусматривает попарное вычитание допплеровских сдвигов частоты сигналов по каналам "нос-корма" и "левый-правый" и как результат - выработку двух горизонтальных составляющих абсолютной скорости Vax и Vау. При этом удается в определенном диапазоне углов крена и дифферента скомпенсировать ошибки, обусловленные бортовой и килевой качкой корабля. Область эффективного действия системы типа ЯНУС определяется соотношением

где α0 - угол между направлением движения и направлением излучения, входящий в основную формулу для допплеровского сдвига частоты;
Δα - значения углов крена (дифферента),при которых приближенное равенство (1) выдерживается с заданной точностью.
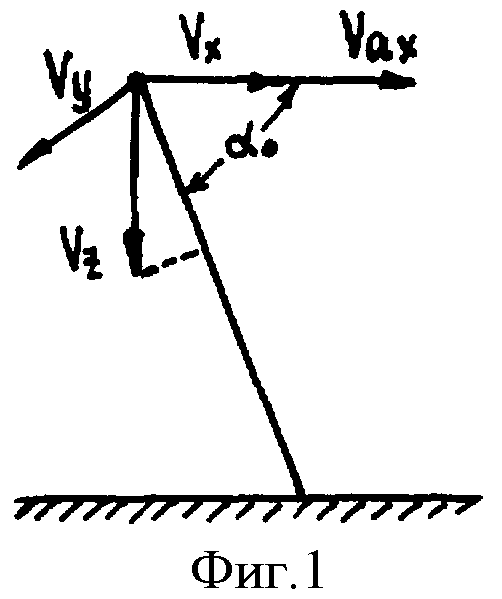
Однако при движении корабля на реальном волнении центр тяжести корабля совершает орбитальное движение, которое помимо двух горизонтальных составляющих скорости Vx и Vy характеризуется также и вертикальной составляющей Vz. (фиг.1). При этом составляющая скорости Vz, проектируясь на направление излучения, вызывает дополнительное ("паразитное") допплеровское смещение частоты,

которое для аппаратуры лага не отличимо от полезного допплеровского сдвига, обусловленного, например, горизонтальной составляющей орбитального движения Vx, либо поступательной скоростью корабля Vax. Если бы вертикальное перемещение корабля происходило при постоянном угле дифферента или крена (например, на ровном киле), то дополнительные допплеровские сдвиги частоты по каждому из лучей при движении вверх и вниз были бы равны по величине и обратны по знаку. В этом случае суммарное приращение допплеровской частоты за счет составляющей скорости Vz, а следовательно, и ошибка измерения были бы равны нулю. В действительности же вертикальное перемещение корабля сопровождается одновременным изменением углов крена и дифферента, в связи с чем полной компенсации допплеровских сдвигов частоты не происходит. Очевидно, что при измерении продольной составляющей скорости максимальная величина ошибки была бы в том случае, если при перемещении вверх корабль имел, например, дифферент на корму, а при движении вниз - на нос (фиг.2).
Аналогично обстоит дело и при измерении поперечной составляющей скорости Vay, однако в этом случае необходимо совместно рассматривать процессы вертикального перемещения и бортовой качки корабля.
Проведенными на предприятии исследованиями установлено, что с приемлемой для практики точностью величина указанной ошибки, носящей систематический характер, определяется соотношением (3)

где b - константа (для данного типа корабля);
Vz - вертикальная составляющая скорости орбитального движения;
Ψ - угол качки.
В выражении (3) константа b учитывает реальные взаимо-корреляционные характеристики случайных процессов вертикального перемещения и качки корабля, а также фактическое время осреднения информации.
Расчеты показывают (4), что для подводных лодок большого водоизмещения относительная ошибка уже при Ψ=2° достигает величины  , что соизмеримо с заданными точностями измерения абсолютной скорости. Таким образом, задача, решаемая предлагаемым изобретением, является весьма важной. Для компенсации систематической ошибки, обусловленной вертикальной составляющей скорости орбитального движения корабля Vz, необходимо постоянно вырабатывать значение поправки ΔVz в соответствие с выражением (3) и корректировать измеренные значение скорости по формуле
, что соизмеримо с заданными точностями измерения абсолютной скорости. Таким образом, задача, решаемая предлагаемым изобретением, является весьма важной. Для компенсации систематической ошибки, обусловленной вертикальной составляющей скорости орбитального движения корабля Vz, необходимо постоянно вырабатывать значение поправки ΔVz в соответствие с выражением (3) и корректировать измеренные значение скорости по формуле
где Vист - истинное значение скорости перемещения корабля в горизонтальной плоскости;
Vизм - измеренное приемным трактом лага значение скорости.
С учетом вышесказанного блок-схема предлагаемого лага с компенсацией систематической ошибки за счет качки корабля имеет вид, как на фиг.3.
Четырехлучевая акустическая антенна 1 является единой как для излучающего тракта 2, так и приемного тракта 8. Приемный тракт имеет четырехканальную схему 4 для выделения допплеровских сдвигов частоты, соответствующих каждому из лучей антенны. Между приемным трактом 4 и измерительной схемой 3 включен сумматор 6, предназначенный для ввода поправок в измеренные значения скорости. Блок выработки поправки 7, подключенный к входящему в состав излучающего тракта формирователю импульсов переменной длительности 8, приемному тракту 3 и сумматору 6, предназначен для компенсации ошибки за счет смещения спектра эхо-сигнала при работе лага на больших глубинах под килем. Схема 9 предназначена для попарного сложения допплеровских частот в каналах "нос-корма" либо "левый борт - правый борт" с целью получения информации о вертикальной составляющей скорости Vz. На вход перемножителя 10 помимо информации о вертикальной составляющей скорости Vz c выхода схемы 9 поступает также информация о текущих значениях углов бортовой и килевой качки. Умножитель предназначен для выработки поправки, компенсирующей ошибку, обусловленную вертикальной составляющей скорости корабля на качке. Умножитель 10 подключен к одному из входов сумматора 6.
Предлагаемая схема функционирует следующим образом. При использовании гидроакустического лага по прямому назначению на вход схемы 9 с выходов каналов 4 приемного тракта 3 поступают сигналы с частотами, содержащими допплеровские сдвиги как за счет поступательного движения, так и за счет вертикальных перемещений корабля на качке. В схеме 9 происходит попарное сложение частот сигналов, поступивших с противоположных каналов (нос-корма, левый борт - правый борт). Частоту сигнала на выходе носового канала приемного тракта 3 можно представить в виде

а на выходе кормового

где f0 - частота излученного сигнала;
fg0 - полезный допплеровский сдвиг частоты, обусловленный скоростью поступательного движения корабля;
fgz - допплеровский сдвиг частоты, вызванный вертикальной составляющей скорости Vz.
На выходе схемы 9 частота сигнала будет равна

После исключения удвоенного значения известной частоты f0 частота fgz может быть использована для вычисления поправки согласно выражению (3). Для этого сигнал с частотой fgz≡Vz поступает на один из входов умножителя 10. На другой вход умножителя поступают данные о текущих значениях углов качки, которые могут быть получены, например, от штатной корабельной гировертикали.
В перемножителе 10 осуществляются необходимые электрические и масштабные преобразования, а затем и перемножение входных величин. Выработанная поправка поступает на один из входов сумматора 6, где в соответствие с формулой (4) обеспечивает компенсацию ошибки за счет вертикальных перемещений корабля на качке. Выработка поправки и коррекция измеренных значений скорости производится раздельно для продольной Vax и поперечной Vay составляющих скорости, для чего соответственно используются значения углов килевой и бортовой качки.
Положительный эффект
Компенсация ошибок, обусловленных вертикальными перемещениями корабля, позволяет повысить точность работы существующих типов гидроакустических лагов в условиях качки в 1,4-1,8 раза и расширить диапазон углов качки, при которых возможна работа с заданными точностями измерения скорости.
Изобретение является весьма эффективным при разработке схемы лага для надводного корабля, так как может исключить необходимость стабилизации антенны в вертикальной плоскости, что связано с большими конструктивными трудностями из-за больших габаритов и весов акустических антенн. В настоящее время предлагаемая схема лага реализуется в ОКР.
ЛИТЕРАТУРА
1. Проспект Geberal Applied Science Laboratories "Doppler Navigator Janus".
2. Shiplilding & Shipping record №4, 112, 26.07.1968 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОАКУСТИЧЕСКИЙ ЛАГ | 1970 |
|
SU1840717A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ КОРАБЛЯ ОТНОСИТЕЛЬНО ДНА МОРЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1977 |
|
SU1840287A1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛАГ | 1974 |
|
SU1840684A1 |
| ГИДРОАКУСТИЧЕСКИЙ ДОППЛЕРОВСКИЙ ЛАГ | 1974 |
|
SU1840682A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ КОРАБЛЯ ОТНОСИТЕЛЬНО ГРУНТА | 1969 |
|
SU1840754A1 |
| Способ измерения скорости судна доплеровским лагом | 2017 |
|
RU2659710C1 |
| ГИДРОАКУСТИЧЕСКИЙ ДОППЛЕРОВСКИЙ ЛАГ | 1972 |
|
SU1840761A1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2439614C2 |
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ТЕЧЕНИЯ | 1969 |
|
SU1840690A1 |

Гидроакустический лаг содержит передающий тракт, приемно-излучающую антенну, приемный тракт со схемами выделения допплеровского сдвига частот эхо-сигнала по отдельным каналам блоками выработки поправки на смещение спектра, сумматоры и измерительную схему. Схема выделения допплеровского сдвига частоты подключена между выходом каждой соответствующей пары каналов приемного тракта и перемножителем. Один из входов перемножителя подключен к выходу схемы выделения допплеровского сдвига частоты. Второй вход - к датчику углов качки судна. Выход перемножителя подключен к одному из входов сумматора. Технический результат - компенсация систематической погрешности лага, обусловленной одновременным вертикальным перемещением судна и угловой качкой. 3 ил.
Гидроакустический лаг, содержащий передающий тракт, приемно-излучающую антенну, приемный тракт со схемами выделения допплеровского сдвига частот эхо-сигнала по отдельным каналам и блоками выработки поправки на смещение спектра, сумматоры и измерительную схему, отличающийся тем, что, с целью компенсации систематической погрешности лага, обусловленной одновременным вертикальным перемещением судна и угловой качкой, схема выделения допплеровского сдвига частоты подключения между входом каждой соответствующей пары каналов приемного тракта и перемножителем, при этом один из входов перемножителя подключен к выходу схемы выделения допплеровского сдвига частоты, второй вход - к датчику углов качки судна, а выход перемножителя подключен к одному из входов сумматора.

