Изобретение относится к средствам механизации и автоматизации погрузоч- нр-разгрузочных работ.
Целью изобретения является повышение удобства эксплуатации и производительности.
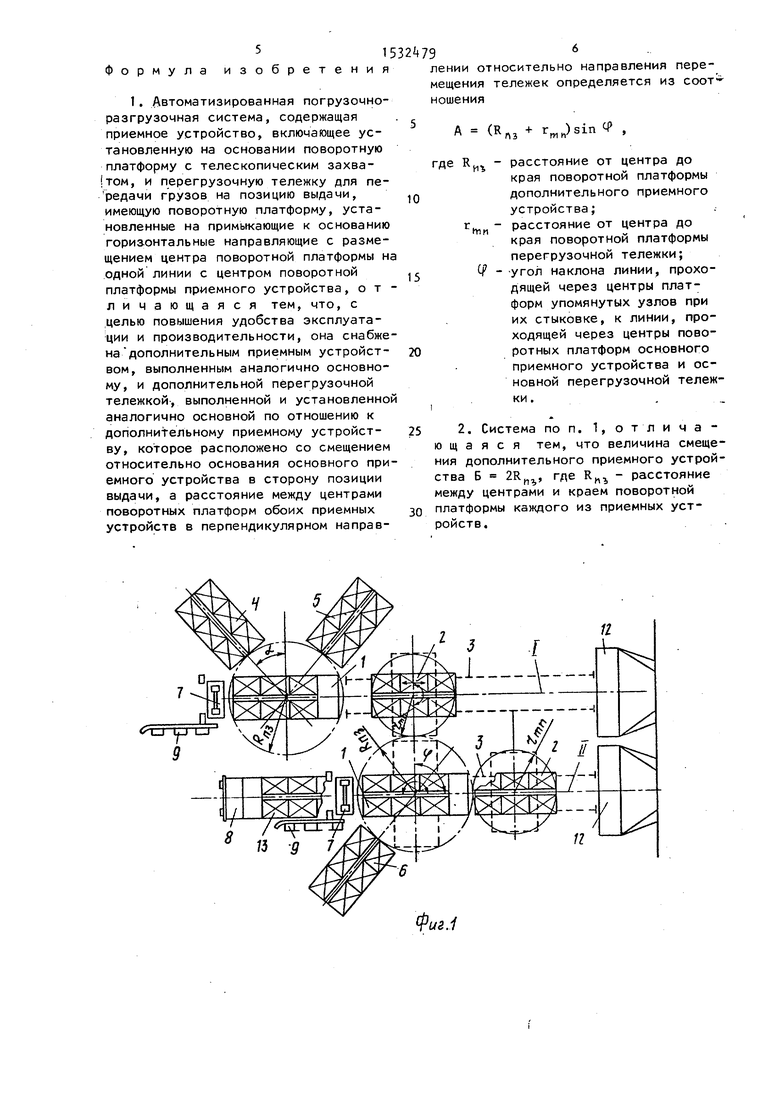
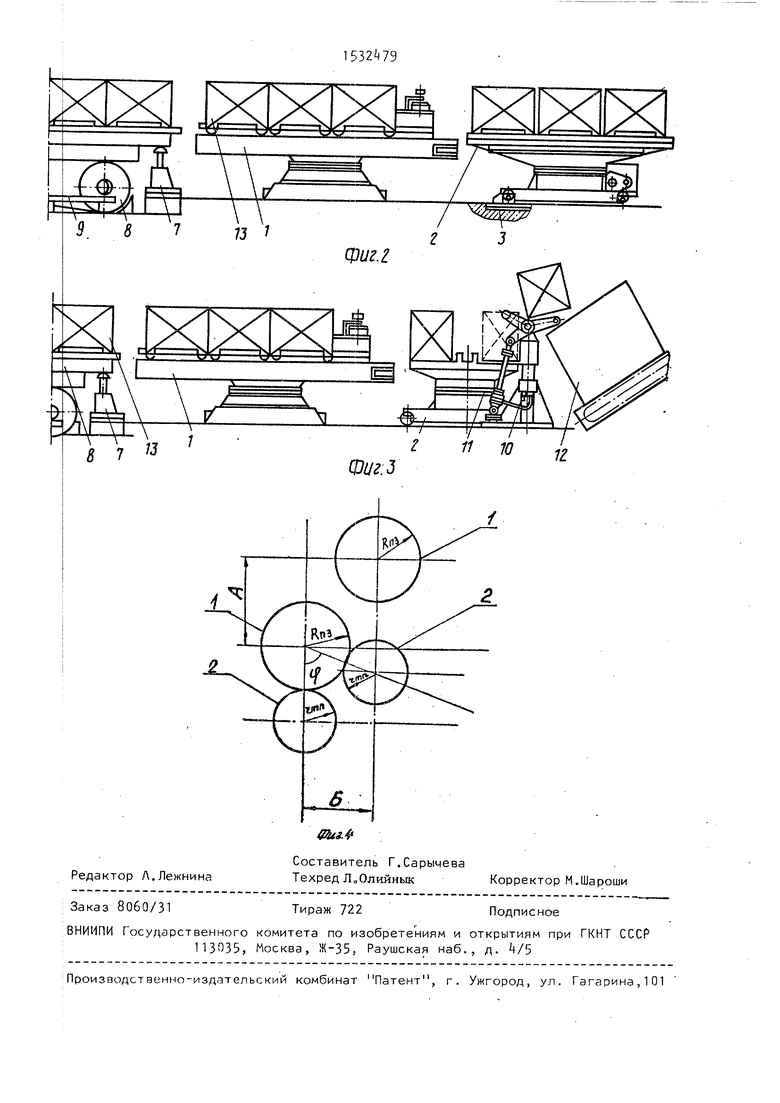
На фиг. 1 изображена автоматизированная погрузочно-разгрузочная система, вид в плане; на фиг. 2 - то же, вид сбоку; на фиг. 3 - то же, при разгрузке контейнеров; на фиг. 4 - геометрическая схема расположения
взаимозаменяющих устройств I и II в пла не.
Автоматизированная погрузочно-разгрузочная система содержит два па- раллельно расположенных приемных устройства I и И для контейнеров, в состав которых входят поворотная платформа 1 с телескопическим захватом, транспортная перегрузочная тележка 2 с пово|эотной платформой, рельсовый путь 3, приемные столы 4-6, устройство 7 стыковки автомобиля 8, направля|о1цая 9, контейнероопрокидыватель 10 с |гидроцилиндром 11, приемный бункер 12 контейнер 13.
I Система работает следующим обра- |зом,
; Автомобиль 8 с швстью контейнера- |ми 13 устанавливается вдоль направляю щей 9, и с помощью механизма 7 сты- |ковки платформа кузова выравнивается на уровень поворотной платформы 1 телескопическим захватом 1.
В случае, если поворотная платформа с телескопическим захватом 1, тележка с поворотной платформой 2 и контейнероопрокидыватель 10 исправны, работа устройства I или II осуществляется в следующем порядке. Поворотная платформа 1 выдвинутым телескопическим захватом снимает одновременно с кузова автомобиля все шесть контейнеров, втягивает на себя контейнеры, поворачивается на 180 и перегружает контейнеры на поворотную платформу I транспортной тележки 2 (фиг. 2).
Далее тележка 2 с контейнерами перемещается в зону действия контейне- роопрокидывателей 10, затем поворот- Iная платформа тележки поворачивается I на 90 и три контейнера подхватывают- Iся вилами контейнероопрокидывателя. I При включении гидроцилиндра-11 контей I нероопрокидывателя происходит опроки- I дывание груженых контейнеров в бун- кер 12 и установка на тележку порож- : НИХ. Затем платформа транспортной
тележки поворачивается еще на IBO : и опрокидываются следующие три кон- : тейнера. По завершении процесса опорожнения порожние контейнеры в обратной последовательности устанавливайт- ся в кузов автомобиля 8 или на приемный стол 6.
В случае, если контейнероопрокидыватель, например, в устройстве II вышел из строя, передача груженых контейнеров поворотной плотформой 1 осуществляется на тележку 2 устройства I, которая после приема контейнеров перемещается к контейнероопроки- дывателю 10 на этой линии.
Расстояние, на которое смещены друг относительно друга центры пово ротных платформ приемных устройств, равно Б 2R, где - расстояние между центром и краем поворотной платформы каждого из приемных устройств. Расстояние между центрами поворотных платформ обоих приемных
устройств в перпендикулярном направ- лении относительно направления переме- щения тележек определяется из соотношения
А (К,, +
из
r)sin
где R
пэ
-mn
q расстояние от центра до края поворотной платформы приемных устройств; расстояние от центра до края поворотной платформы основной перегрузочной тележки ;
угол наклона линии, проходящей через центры платформ упомянутых узлов при их .стыковке, к линии, проходящей через центры поворотных., платформ основного, приемно-- го устройства и основной перегрузочной тележки.
5
0
5
0
5
0
5
В случае, если узел 7 стыковки устройства II вышел из строя, в описанной последовательности работает устройство 1« При этом после разгрузки автомобилей контейнеры могут быть перемещены тележкой 2 в зону действия контейнероопрокидывателя 10. Контейнеры, снятые с последующих автомобилей, устанавливаются поворотной платформой на промежуточные столы 4 и 5 и затем работа системы может выполняться в сле)цующей последовательности.
Поворотная платформа 1, повернувшаяся на угол 90° - oi, снимает шесть контейнеров с промежуточного стола k и телескопическим захватом перегру- . жает их на себя и возвращает их поворотной частью платформы в исходное состояние. Далее тем же захватом перемещает контейнеры на тележку 2, Тележка 2 перемещается в направлении к контейнероопрокидывателю .10 и в случае его неисправности останавливается в зоне действия поворотной платформы 1 устройства II и поворачивается на 90°, Телескопическим захватом это поворотное устройство перегружает контейнеры на себя, по- вора,чивается на 90° и перегружает контейнеры на транспортную тележку 2 устройства II, которая перемещается в зону действия контейнероопрокидывателя 10.
Формула изобретения
1. Автоматизированная погрузочно- разгрузочная система, содержащая приемное устройство, включающее установленную на основании поворотную платформу с телескопическим захва- том, и перегрузочную тележку для пе- редачи грузов на позицию выдачи, имеющую поворотную платформу, установленные на примьгкающие к основанию горизонтальные направляющие с размещением центра поворотной платформы на одной линии с центром поворотной платформы приемного устройства, о т - личающаяся тем, что, с ,целью повышения удобства эксплуатации и производительности, она снабжена дополнительным приемным устройством, выполненным аналогично основному, и дополнительной перегрузочной тележкой, выполненной и установленной аналогично основной по отношению к дополнительному приемному устройству, которое расположено со смещением относительно основания основного приемного устройства в сторону позиции выдачи, а расстояние между центрами поворотных платформ обоих приемных устройств в перпендикулярном направлении относительно направления перемещения тележек определяется из соот- ношения
А (R
r..)sin
где R
н%
Щи
ц расстояние от центра до края поворотной платформы дополнительного приемного устройства;
расстояние от центра до края поворотной платформы перегрузочной тележки; угол наклона линии, проходящей через центры платформ упомянутых узлов при их стыковке, к линии, проходящей через центры поворотных платформ основного приемного устройства и основной перегрузочной тележки .
2. Система по п. 1,отлича- ю щ а я с я тем, что величина смещения дополнительного приемного устройства Б 2Rj,, где К„ - расстояние между центрами и краем поворотной платформы каждого из приемных устройств.

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕГРУЗКИ ГРУЗОВ И СООТВЕТСТВУЮЩАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2005 |
|
RU2374107C2 |
| Транспортно-складская система | 1988 |
|
SU1763327A1 |
| Линия товарной обработки картофеля | 1983 |
|
SU1139401A1 |
| Грузовое транспортное средство | 1986 |
|
SU1564019A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ШТУЧНЫХ ГРУЗОВ В ФОРМЕ ТРАНСПОРТНЫХ УПАКОВОК | 1992 |
|
RU2093446C1 |
| СПОСОБ УБОРКИ И ПОДГОТОВКИ КАПУСТЫ К ХРАНЕНИЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2244398C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ГОРОДСКОЙ КОМПЛЕКС И АВТОМАТИЗИРОВАННАЯ ПОДЗЕМНАЯ СИСТЕМА АДРЕСНОЙ ДОСТАВКИ ГРУЗОВ | 2013 |
|
RU2526202C1 |
| СТОЛ ПЕРЕГРУЗОЧНЫЙ | 2018 |
|
RU2695863C1 |
| Транспортная складская система | 2016 |
|
RU2643615C2 |
| СИСТЕМА И СПОСОБ ВЫГРУЗКИ И ПОГРУЗКИ ГРУЗОСОДЕРЖАЩИХ МОДУЛЕЙ ИЗ ОТКРЫТЫХ ГРУЗОВЫХ ПЛАТФОРМ И НА ПЛАТФОРМЫ | 2009 |
|
RU2508214C2 |
Изобретение относится к средствам механизации и автоматизации погрузочно-разгрузочных работ. Цель изобретения - повышение удобства эксплуатации и производительности. Автоматизированная погрузочно-разгрузочная система содержит приемное устройство для контейнеров, состоящее из поворотной платформы 1 с телескопическим захватом и транспортной тележки 2 с поворотной платформой, а также дополнительное аналогичное приемное устройство для контейнеров, промежуточными приемными столами, размещенными с внешней стороны под углом α к поперечной оси каждого устройства приема контейнеров и контейнероопрокидывателями, причем оптимальные расстояния между центрами поворотных платформ приемных устройств в направлении перемещения тележек Б = 2Rпз, а в перпендикулярном направлении оно определяется из соотношения A = ( Rпз + Rмн) SINφ, где Rпз - радиус действия поворотной платформы с телескопическим захватом
Rмн - радиус действия поворотной платформы транспортной тележки
φ - угол наклона линии взаимодействия поворотной платформы с телескопическим захватом с поворотной платформой транспортной тележки относительно продольной оси. 1 з.п. ф-лы, 4 ил.
(pu2.i
фцг:3
11
