Изобретение относится к весоизмерительной технике, в частности к устройствам для взвешивания объектов в движении, например свиней и других сельскохозяйственных животных.
Цель изобретения - повышение точности измерения массы животного при движении.
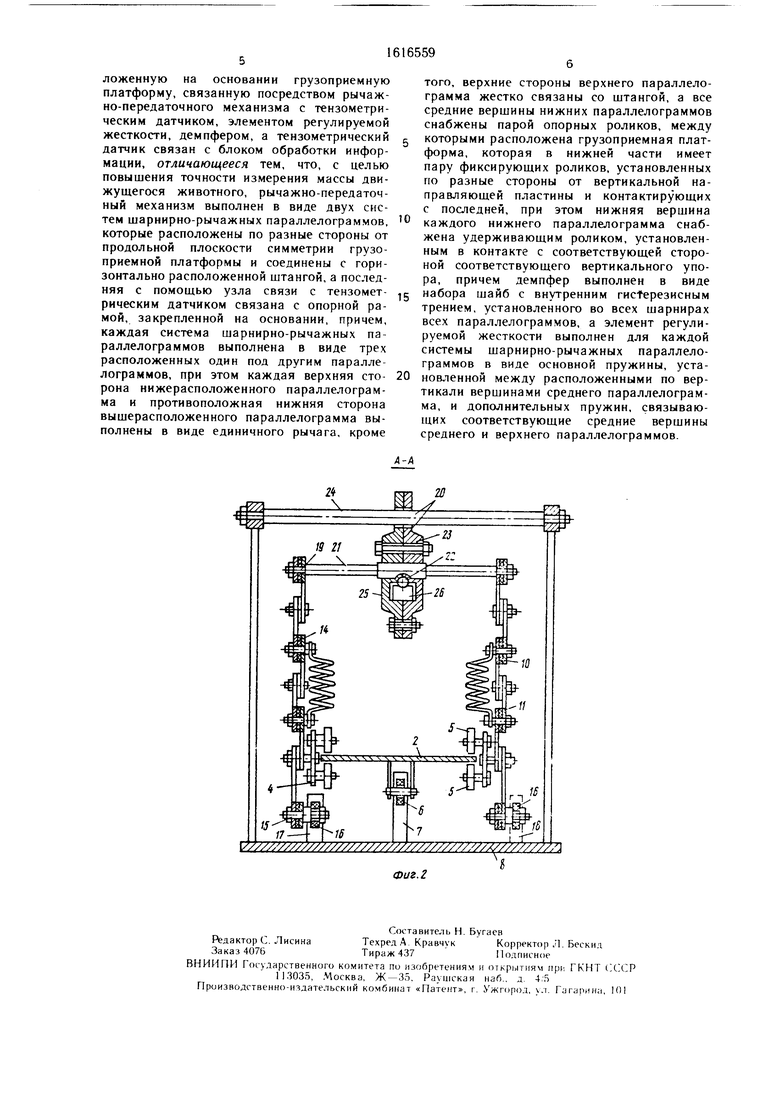
На фиг. 1 схематически изображено предлагаемое весовое устройство, общий вид; на фиг 2 - разрез А -А на фиг. 1.
Весовое устройство содержит системы шарнирно-рычажных паралтелограммов 1, которые расположены по обеим сторонам
ное соединение их верхних шарниров 19 с опорной рамой 8 через узел связи с одним тензометрическим датчиком 26 приводит весы к статически определенной систе- g ме. Данные регистрируются в блоке 27 обработки информации.
Устройство работает следующим образом.
Животное с земли сходит на огороженный с боков наклонный настил (не показан) и перемещается в грузоприемной 10 платформе 2. При переходе с настила на платформу животное вначале ставит на ее край одну ногу и переносит часть своего веса Под действием этой силы платформа
давит на ролики 5, которые опускаются грузоприемной платформы 2. Каждый шар- g и одновременно перекатываются по краям нирно-рычажный параллелограмм I симмет-платформы к ее середине. Так как в обеих
параллелограммах 1 верхние шарниры 19 неподвижны, все рычаги 10 и 11 шар- нирно соединены своими концами, оси всех рычагов проходят через геометрические
рично относительно связывающей оси средних 1иарниров 3 линии снабжен обоймами 4 с двумя опорными роликами 5, между которыми защемлена платформа 2, снизу к
которой по обе стороны от центра масс 20 центры шарниров, а ролики 5 укреплены укреплены два фиксирующих ролика 6 с воз-у крайних шарниров и нагружаются только
можностью перекатываться по противопо-вертикальной силой, то каждый рычаг испытывает от веса животного только растяжение, обусловливающее вертикальное переложным сторонам вертикально упора 7, жестко связанного с рамой 8. Оси соседних
средних шарниров 3 соединены между собой (. основной пружиной 9, а скрещивающиеся у них рычаги 10 и 11 и крайние соседние п арниры 12 соединены дополнительными пружинами 13, что все вместе представляет упругий элемент регулируемой жестмещение вниз всех подвижных средних шарниров 3 с поворотом вокруг них рычагов 10 и 11. Опусканию шарниров и повороту рычагов препятствуют силы упругости пружин 9 и 13 и гистерезисное трение в элементах 14. При малых нагрузках
кости. Во всех шарнирах параллелограм- зо работают только пружины 9. После осво.мов 1 между рычагами помещены упругие элементы 14 с внутренним гистере- зисным трением. Нижние средние шарниры 15 снабжены удерживающими роликами 16 с возможностью прижима одного ролика к
бождения животным настила платформа 2 воспринимает полную его массу и включаются в работу пружииы 13. Одновременно с этим датчик, встроенный в настил, выдает сигнал о появлении животупору 17 слева, а другого - к упору 18 35 ного в блок 27 обработки информации.
справа. Верхние средние шарниры 19 соединены с опорной рамой 8 через узел 20 связи, содержащий штангу 21, соединяющую левый и правый шарниры 19, в средней части которой имеется сферическое углубление для фиксации шарика 22. На штангу 21 насажен разъемный корпус 23, в верхнее отверстие которого параллельно штанге 21 встав,лена ось 24, жестко связанная с рамой 8. В корпусе 23 ниже отв котором электрические сигналы от датчика 26 обрабатываются в информацию. Вследствие движения животного по платформе 2 возникают горизонтальные реакции трения копыт ног о поверхность платформы, которые с частотой перестановки ног толкают ее в сторону, противоположную движению животного. От горизонтальных переЛ(ещений платформа 1 удерживается роликами 6, постоянно прижатыми к верстия под (птангу 21 симметрично линии 45 Упору 7. Гашение вертикальных колебаний разъема выполнена цилиндрическая выточкаплатформы 1 от толчков ног в основном
25, к установлен тензометрическийдостигается регулируемой упругостью пружин 9 и 13 и гистерезйсным трением в упругом элементе 14. В случае неспокойного поведения животного и передаче уменьшения зазоров и недопущения резо- 50 платформе 2 сильных толчков и ударов.
датчик 26 с возможностью шарнирного защемления между ним и штаигой 21 шарика 22. С целью смягчения ударов.
нансных колебаний параллелограммов I и платформы 2 от то.мчков ног животного при движении, контактирующая с упорами 7, 17 и 18 поверхность роликов 5, 6 и 16 выполнена из упругого материала.
Снабжение обоих шариирно-рычажных параллелограммов пружинами 9 и 13 регулируемой жесткости, элементами 14 с внутренним гистерезйсным трением и симметрич55
ее колебания уменьшаются или полностью устраняются за счет того, что шариирно- рычажный параллелограмм 1 обладает одновременно свойствами виброизолятора и амортизатора.
Формула изобретения
Весовое устройство для взвешивания животных в движении, содержащее распоное соединение их верхних шарниров 19 с опорной рамой 8 через узел связи с одним тензометрическим датчиком 26 приводит весы к статически определенной систе- ме. Данные регистрируются в блоке 27 обработки информации.
Устройство работает следующим образом.
Животное с земли сходит на огороженный с боков наклонный настил (не показан) и перемещается в грузоприемной платформе 2. При переходе с настила на платформу животное вначале ставит на ее край одну ногу и переносит часть своего веса Под действием этой силы платформа
давит на ролики 5, которые опускаются и одновременно перекатываются по краям платформы к ее середине. Так как в обеих
мещение вниз всех подвижных средних шарниров 3 с поворотом вокруг них рычагов 10 и 11. Опусканию шарниров и повороту рычагов препятствуют силы упругости пружин 9 и 13 и гистерезисное трение в элементах 14. При малых нагрузках
работают только пружины 9. После освоработают только пружины 9. После освобождения животным настила платформа 2 воспринимает полную его массу и включаются в работу пружииы 13. Одновременно с этим датчик, встроенный в настил, выдает сигнал о появлении животв котором электрические сигналы от датчика 26 обрабатываются в информацию. Вследствие движения животного по платформе 2 возникают горизонтальные реакции трения копыт ног о поверхность платформы, которые с частотой перестановки ног толкают ее в сторону, противоположную движению животного. От горизонтальных переЛ(ещений платформа 1 удерживается роликами 6, постоянно прижатыми к 5 Упору 7. Гашение вертикальных колебаний платформы 1 от толчков ног в основном
жин 9 и 13 и гистерезйсным трением в упругом элементе 14. В случае неспокойного поведения животного и передаче платформе 2 сильных толчков и ударов.
ее колебания уменьшаются или полностью устраняются за счет того, что шариирно- рычажный параллелограмм 1 обладает одновременно свойствами виброизолятора и амортизатора.
Формула изобретения
Весовое устройство для взвешивания животных в движении, содержащее расположенную на основании грузоприемную платформу, связанную посредством рычаж- но-передаточного механизма с тензометри- ческим датчиком, элементом регулируемой жесткости, демпфером, а тензометрический датчик связан с блоком обработки информации, отличающееся тем, что, с целью повышения точности измерения массы движущегося животного, рычажно-передаточ- ный механизм выполнен в виде двух систем шарнирно-рычажных параллелограммов, которые расположены по разные стороны от продольной плоскости симметрии грузо- приемной платформы и соединены с горизонтально расположенной штангой, а последняя с помощью узла связи с тензомет- рическим датчиком связана с опорной рамой, закрепленной на основании, причем, каждая система шарнирно-рычажных параллелограммов выполнена в виде трех расположенных один под другим параллелограммов, при этом каждая верхняя сторона нижерасположенного параллелограмма и противоположная нижняя сторона выщерасположенного параллелограмма выполнены в виде единичного рычага, кроме
с
5
0
того, верхние стороны верхнего параллелограмма жестко связаны со штангой, а все средние вершины нижних параллелограммов снабжены парой опорных роликов, между которыми расположена грузоприемная платформа, которая в ннжней части имеет пару фиксирующих роликов, установленных по разные стороны от вертикальной направляющей пластнны и контактирующих с последней, при этом нижняя вершина каждого нижнего параллелограмма снабжена удерживающим роликом, установленным в контакте с соответствующей стороной соответствующего вертикального упора, причем демпфер выполнен в виде набора шайб с внутренним гиctepeзиcным трением, установленного во всех шарнирах всех параллелограммов, а элемент регулируемой жесткости выполнен для каждой системы шариирно-рычажных параллелограммов в виде основной пружииы, уста- новлеиной между расположенными по вертикали вершинами среднего параллелограмма, и дополнительных пружин, связывающих соответствующие средние вершины среднего н верхнего параллелограммов.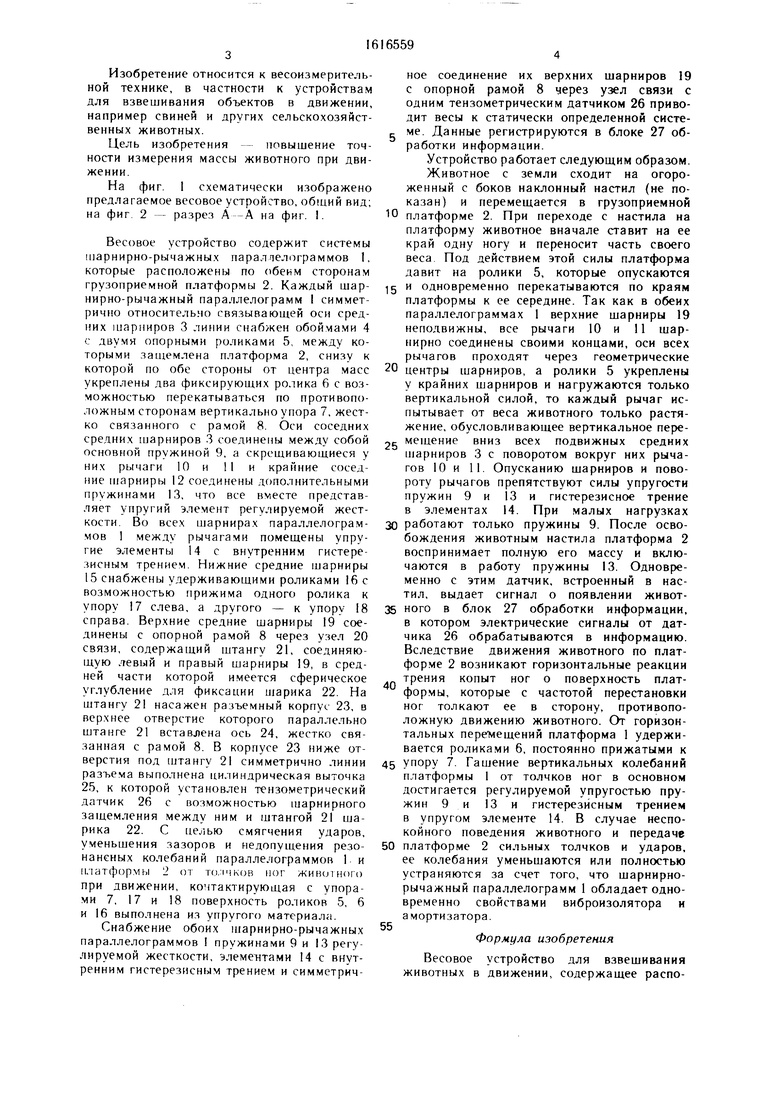
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи многослойного настила к вырубочному прессу | 1981 |
|
SU1036648A1 |
| Весоизмерительное устройство | 1987 |
|
SU1532819A1 |
| Весы для взвешивания на судах | 1979 |
|
SU803634A1 |
| Устройство для подачи многослойногоНАСТилА K ВыРубОчНОМу пРЕССу | 1979 |
|
SU844528A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1988 |
|
SU1594079A1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| Устройство для автоматического весового дозирования штучных изделий | 1976 |
|
SU679812A1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ ДЛЯ ДОИЛЬНОЙ УСТАНОВКИ ДЛЯ АВТОМАТИЧЕСКОГО ДОЕНИЯ ДОЙНЫХ ЖИВОТНЫХ, ПЕРЕГОРОДКА ДОИЛЬНОЙ УСТАНОВКИ И ДОИЛЬНАЯ УСТАНОВКА | 2015 |
|
RU2650392C9 |
| Протез нижней конечности | 1984 |
|
SU1225566A1 |
| Толкатель печных вагонеток | 1983 |
|
SU1153218A1 |
Изобретение относится к весоизмерительной технике, в частности к устройствам для взвешивания объектов в движении, например свиней и других сельскохозяйственных животных. Цель изобретения - повышение точности измерения массы животного при движении. Системы шарнирно-рычажных параллелограммов 1 расположены по обеим сторонам грузоприемной платформы 2 и снабжены обоймами с двумя опорными роликами 5, между которыми защемлена платформа 2, снизу к которой по обе стороны от центра масс прикреплены два фиксирующих ролика 6 с возможностью перекатываться по сторонам вертикального упора 7. Оси соседних средних шарниров 3 соединены между собой основной пружиной 9, а скрещивающиеся рычаги и крайние соседние шарниры 12 соединены дополнительными пружинами 13. При заходе животного на приемную платформу 2 последняя давит на ролики 5, которые опускаются и одновременно перекатываются по краям приемной платформы 2 к ее середине. При этом каждый рычаг испытывает от веса животного растяжение. Опусканию шарниров 3 и повороту рычагов препятствуют силы упругости пружин 9, 13 и гистерезисное трение в элементах упругих. При малых нагрузках работают только пружины 9. Приемная платформа 2 воспринимает полную массу животного, включаются в работу пружины 13. Датчик, встроенный в настил, выдает сигнал о появлении животного в блок 27 обработки информации. От горизонтальных перемещений платформа удерживается роликами 6, постоянно прижатыми к упору 7. 2 ил.
| Весовое устройство для взвешивания движущихся объектов | 1977 |
|
SU619803A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
