315
Изобретение относится к области управления угловым движением объектов у пругой конструкции и может быть преимущественно использовано при проектировании и создании перспективных систем стабилизации углового положения объектов такого класса.
Целью изобретения является повышение точности процесса стабилиза- ц|ии положения объекта упругой конст- р -кции.
На фиг. представлена функциональная схема устройства для управления объектом упругой конструкции; фиг. 2 - структурная схема блока с тековой памяти; на фиг. 3 - процесс формирования оценки 6.(t),
Устройство для управления объектом упругой конструкции содержит объект 1 управления, датчик 2 угловой ско- , датчик 3 угла, блок 4 исполнительных органов, первый 5, второй 6, тЬетий 7 усилители, сумматор 8, фильт рующе-дифференцируюший блок 9, блок 10 экстраполяции, четвертый усилитель 11, блок 12 запуска, элемент 13 задержки, инвертор 14, ключ 15.
, Фильтрующе-дифференцирующий блок 91 содержит первый 16, второй 17, третий J8 блоки-стековой памяти, первый- в|осьмой сумматоры 19-26,первый-седьмой Усилители 27-33, первый 34 и второй 35 елители напряжения, генератор 36 тактовых импульсов.
Блок 10 экстраполяции содержит Первый 37 и второй 38 сумматоры, первый 39 и второй 40 ключи, апериоди- еское звено 41, элемент 42 задержки. В основу изобретения положено следующее .
Процесс управляемого углового Движения упругого динамического объ- йкта в достаточно общем случае может быть описана системой дифференциальных уравнений
А
0
5
0
5
0
5
Ч5 Ч
S-i1
wi i 3 } - вектор угловой скорости вращения объекта в связанном координатном базисе (СКВ),
G5 i 1.3 , V- , S 1,N - матрица коэффициентов взаимовлияния динамики S-ro упругого элемента и углового движения как жесткого тела,
О l,ns), S 0,N - вектор обобщенных координат упругих деформаций S-ro элемента (S 0 - колебания корпуса)i M,j, Me - управляющий и возмущающий
моменты, приложенные к кор пусу объекта;
К ,(,)- кинематический оператор углового движения объекта Ds dia j5j, v - 1 , , S - 0 , N- матрица коэффициентов дисси-1 пации{ diag Ч 5lf
«5
L5V
) 1 , П5},
0,N-- -матрица квадратов собственных частот колебаний;
s diag sv V 1 s 0, N, - матрица массово-инерционных параметров S-го упругого элемента;
S0 - матрица () коэффициентов влияния упругих деформаций корпуса на угловое смещение CKF;
У0 УЬ i- вектор углов ориентации осей СКВ в опорной системе координат
(ОС) для затвердевшего объекта;
i/(, i 1 ,3 }т - вектор углов
R.
ориентации осей СКВ и ОСК упругого объекта управления, - матрица коэффициентов влияния моментов, прикладываемых к корпусу объекта, на его изгибные колебания. В случае рассмотрения режимов угловой стабилизации вследствие малости углов кинематические соотношения предельно упрощаются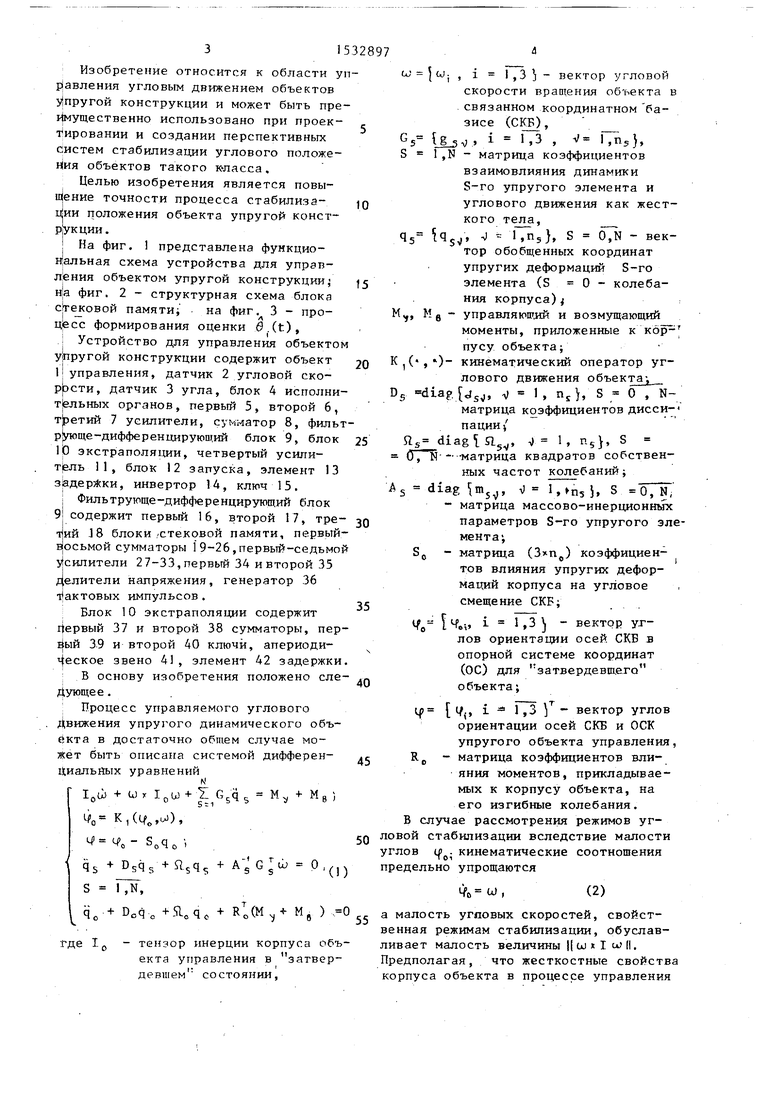



| название | год | авторы | номер документа |
|---|---|---|---|
| Система стабилизации объекта с присоединенным упругим элементом | 1988 |
|
SU1525676A1 |
| Устройство для активного демпфирования упругих колебаний элементов конструкции вращающегося объекта | 1983 |
|
SU1134927A1 |
| Система управления объектом с присоединенным упругодеформируемым элементом | 1986 |
|
SU1403015A1 |
| АДАПТИВНАЯ СИСТЕМА ТЕРМИНАЛЬНОГО УПРАВЛЕНИЯ | 2012 |
|
RU2500009C1 |
| Устройство для контроля радиоэлектронных объектов | 1986 |
|
SU1399773A1 |
| ПРИЕМНОЕ УСТРОЙСТВО ГИДРОЛОКАТОРА БОКОВОГО ОБЗОРА | 1993 |
|
RU2060516C1 |
| Адаптивное устройство для управления объектом с присоединенным упругим элементом | 1985 |
|
SU1297020A1 |
| Устройство для отображения информации на экране цветного телевизионного индикатора | 1986 |
|
SU1388940A1 |
| Следящая система | 1984 |
|
SU1672413A1 |
| Устройство для контроля объектов | 1988 |
|
SU1545231A1 |


Изобретение относится к технике управления угловым движением объектов упругой конструкции и может быть преимущественно использовано при проектировании и создании перспективных систем стабилизации углового положения объектов такого класса. Целью изобретения является повышение точности процесса стабилизации положения объекта упругой конструкции. Устройство для стабилизации объекта упругой конструкции содержит объект управления 1, датчик 2 угловой скорости, датчик угла 3, блок 4 исполнительных органов, первый 5, второй 6, третий 7 и четвертый 11 усилители, сумматор 8, фильтрующе-дифференцирующий блок 9, блок экстраполяции 10, блок запуска 12, элемент задержки 13, инвертор 14 и ключ 15. 2 з.п.ф-лы, 3 ил.
екта управления в затвердевшем 1: состоянии,
и
(2)
а малость угповых скоростей, свойственная режимам стабилизации, обуславливает малость величины || ы х I II. Предполагая, что жесткостные свойства корпуса объекта в процессе управления
5 15328976
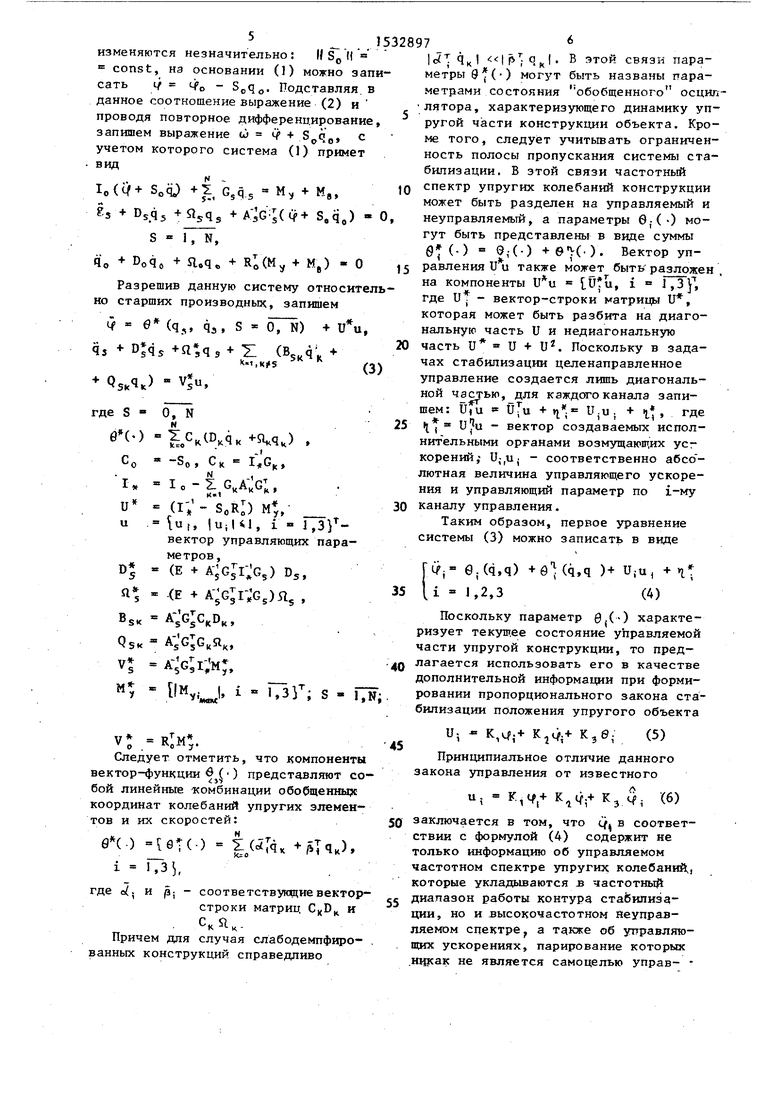
изменяются незначительно: М S0V« . В этой связи пара- const, на основании (J) можно запи- метры 9(-) могут быть названы парасать I/ t-p0 - S0q0. Подставляя вметрами состояния обобщенного осцилданное соотношение выражение (2) и - лятора, характеризующего динамику уппроводя повторное дифференцирование,ругой части конструкции объекта. Крозапишем выражение и) - у + Scqc, с- ме того, следует учитывать ограниченучетом которого система (1) приметность полосы пропускания системы стаВИДбилизации. В этой связи частотный
Т ч +Т г- - - м 4-м10 спектр упругих колебаний конструкции
АО Ч Ч т - сЧч У . ч.
J-1 s sможет быть разделен на управляемый и s + Dsq5 +flsqs +A5G s(tf+ S,qe) « 0, неуправляемый, а параметры 0;(-) моS быть представлены в виде суммы
б(-) - «,() + eIY(l)- Вектор упЧо + + fteq«, + КО(МУ Мв) - 0j«j равления также может быть разложен ,
Разрешив данную систему относитель- На ко по«енты ufu, i - J,3}7,
но старших производных, запишемгде U , - вектор-строки матрицы Ц,
которая может быть разбита на диагоtf б (q,, q3 , S 0, N) + U u,нальную часть U и недиагональную
q j Dtq s +Rlq. + Z (B q +M 43CTb U U + ПосколькУ в 3a«aK«I,K#S стабилизации целенаправленное
+ Q Q ) я у иуправление создается лишь диагональSlt k sной частью, для каждого канала запигде S - ше,м: CI + l U.ui +
N25 ц , - вектор создаваемых исполб() e 2LoCK(DKqK ) ,нительными органами возмущающих усг с f, T- f,корений, U-u. - соответственно Lo °о к ьи
N (лютная величина управляющего ускореI я I о СКАКС , ния и управляющий параметр по i-му
и с - с каналу управления.
и Vi °0ло- пу
u u lu Ј l 3 T-Таким образом, первое уравнение
вектор управляющих пара-системы (3) можно записать в виде метров,
D - (Е + ,) Ds,К- 0;(q,q) +0(q,q )+ UjUl + l
a - (E + А-;с;г,;с5)5г5,3S U 4
g e д- стс DПоскольку параметр 0((-) характе s K k ризует текугоее состояние уЬравляемой
QSK Ав з к51 части упругой конструкции, то преду лагается использовать его в качестве
s s s к у дополнительной информации при форми у llMyi |, Ј S 1,N ровании пропорционального закона стабилизации положения упругого объекта
: -RX.,5 и.-м,,, о)
Следует отметить, что компонентыПринципиальное отличие данного
вектор-функции в ) представляют со-закона управления от известного
бой линейные комбинации обобщенныхu - К I + К С/.+ К J (6)
координат колебаний упругих элемен- 1 а 3 1
тов и их скоростей:50 заключается в том, что Q( в соответа г с 4- -т лствии с формулой (4) содержит не
0 ( ) 10;(-) «qK +РчЧи.)только информацию об управляемом
Ј j з частотном спектре упругих колебаний,,
которые укладываются в частотный
где с/, и р. - соответствующие вектор- диапазон работы контура стабилизастроки матриц CKD иции, но и высокочастотном йеуправ к к-ляемом сцектре, а та.кже об управляюПричем для случая слабодемпфиро-щ ускорениях, парирование которых
ванных конструкций справедливо„ не является самоцелью управ- -«Mi -bj
и-
l ettj, fcj1 + flf. j
, t M + , , tj4,
, t .t, tj7 .ttCtj , tj-t1|J
е
j
Чк+л.
К 1,2.
1 JK
t-.
JK
л
fll-1
-моменты подачи управляющих сигналов соответственно на включение и выключение ИО-,
-длительность чистого запаздывания, обусловленного инерционностью исполнительных устройств системы управления работой ИО;
-моменты включения и выключения ИО;
длительность нарастания и спада формируемого ИО управляющего момента
сГ
).
Ы, ., , «г г
Описанная модель работы ИО достаточно просто имитируется последовательным включением элемента задержки с постоянной времени и апериодического звена с изменяемыми параметрами (при u j 0 постоянная времени 4и, а при
0 - дС-i).
1,2,
5
0
5
0
5
Таким образом, 0.(t) p.(t) - -U; (u ,) . Однако в соответствии с (4) оценка 6(t) действующих на объект возмущений содержит в себе информацию как о возмущениях, обусловленных упругостью конструкции, так и о возмущениях обусловленных перекрестными связями каналов управления объекта. Оба рассматриваемых типа возмущений необходимо парировать. Однако, если при управлении объектом динамическая взаимосвязь каналов управления каким-либо образом уже учтена, из оценки 8 ; должна быть исключена информация ц. как не подлежащая парированию со стороны системы стабилизации. Этот факт должен быть учтен в блоке, непосредственно организующем необходимые оценки.
Следует также отметить, что возможность получения осредненных оценок типа -7 позволяет получать и оценки , свободные в определенной степени от высокочастотных шумов, Такая оценка наряду с оценкой 0;может быть использована в законе управления (5),
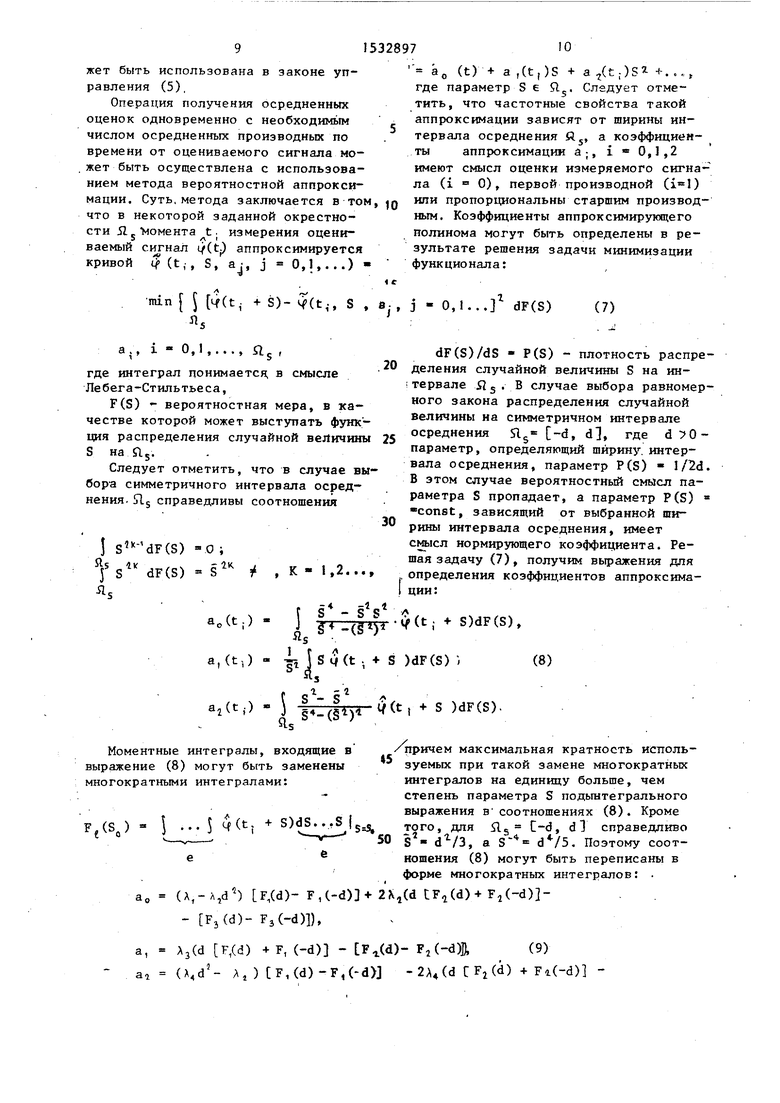
Операция получения осредненных оценок одновременно с необходимым числом осредненных производных по времени от оцениваемого сигнала может быть осуществлена с использованием метода вероятностной аппроксимации. Суть,метода заключается в том, JQ или пропорциональны старшим производчто в некоторой заданной окрестности Л . Момента t. измерения оцениЭЛ I
ваемый сигнал i/(tp аппроксимируется кривой $(:,, S, aj, j 0,1,...) ным. Коэффициенты аппроксимирующего полинома могут быть определены в результате решения задачи минимизации функционала:
nan
S 4(t,. + s)- $(tit s n
а., i - 0,1 ,..., ils ,
где интеграл понимается, в смысле Лебега-Стильтьеса,
F(S) - вероятностная мера, в качестве которой может выступать функция распределения случайной величины S на Ј15.
Следует отметить, что в случае выбора симметричного интервала осреднения. Sic справедливы соотношения
- IV.
S2K
1,2...,
S -(§1)
11
S S
a,(t,)
ls
ils
M(t . + S )dF(S) i
sl
51
(t) «(tt + S )dF(S).
Моментные интегралы, входящие в выражение (8) могут быть заменены многократными интегралами:
Ч
...J 4(t. + slus---
ееношения (8) могут быть переписаны в
форме многократных интегралов: .
а0 (Af-M4) F,(d)- tF4(d)+F7(-d)- - F3(d)- F3(-d)),
a, A3(d F,(d) +F, (-d) - Fa(d)- F2(-d)B,(9)
aa MJ- At) F1(d)-F1(-d)J - 2A4(d С Fz (d) + Fi(-d) а0 (t) + a ,(t,)S + a t(t;)S +.
51S Следует отмегде параметр S е
тить, что частотные свойства такой аппроксимации зависят от ширины интервала осреднения fts, а коэффициенты аппроксимации а;, i 0,1,2 имеют смысл оценки измеряемого сигнала (i 0), первой производной ()
или пропорциональны старшим производным. Коэффициенты аппроксимирующего полинома могут быть определены в результате решения задачи минимизации функционала:
8;, j - 0,1...1 dF(S)
(7)
dF(S)/dS - P(S) - плотность распределения случайной величины S на интервале Я s . В случае выбора равномерного закона распределения случайной величины на симметричном интервале осреднения Я& -d, d, где d 70- параметр, определяющий ширину, интервала осреднения, параметр P(S) - l/2d. В этом случае вероятностный смысл параметра S пропадает, а параметр P(S) а «const, зависящий от выбранной ширины интервала осреднения, имеет смысл нормирующего коэффициента. Решая задачу (7), получим выражения для определения коэффициентов аппроксима- ции:
§1)
11
S S V(t; S)dF(S),
(8)
/причем максимальная кратность исполь- зуемых при такой замене многократных интегралов на единицу больше, чем степень параметра S подынтегрального выражения в соотношениях (8). Кроме того, для Лs , dl справедливо
50
S7 dz/3, а dVs. Поэтому соот1115
- F3(d) - Fj(-d)J), где Л, 9/(8d)
A7 45/(2d); Л3 3/(2d ); Д4- 45/(8d5).
Следует отметить, что параметр э0, являющийся аппроксимаиионной оценкой измеряемого сигнала, может быть оце- нек существенно более простым выражением при использовании в задаче (7) линейной аппроксимации
i.Ct,) - I M4t, + S)dF(S) - iЛ5
) - Ft(-d)l, (9 )
15
гд
М 0,5/d.
1
f(t , -л ) --jpj s,(N1f t,) - S ,(l, t,);
- v(t , -л) - ,, t,) + S,(l, t,)+(0)
+ p, S, (1, t,) - Sj(N,-l, t,),
| if (t, -л) cT (,, t,) -fll3S,(l, t.)) где
- (/3,S(N,, t;) (1, t.)) + 2(S3(Nf, t,) - S5(l, t,)),
SS(N,, tt) -Јst(Nlt tj; 35
Л од (N,-1) Д Г - величина чистого1 -эапсзздывания в получении опенок,
S,(I, t,) - rf S,(N,, tK).
Учитьшая тот факт, что оце лучаемые по соотношениям (J 0) мируются с запаздыванием на й 0,5 (N.,-1) д - секунд, а п водные от оцениваемого сигнал ладают прогнозирующими свойст можно записать:
/:, (O.SN,-),
(2пэ + 5п + 3)/3;
(2п2 - п)/3,
N t(N,+ l)(2N1 +1)/(6/11 )
2п + 3;
2n-U
40
45
cf
45
n(n+l) (2n+1) (4n 1- +4п-3)лС2 n - O.),
S,(N,,t,) Q(g ,
S,(l, t,) (tK), tM- t,,
M (t - t,)/4 - количество измерений, произведенных от начала обработки информации,
Sa(N1s t, ) Г. S,(Nlt tK), 8гО, t,) rSiCN,, t,);
9 (t,) - 3(t.) - U (u(t,)) (12)
Для обеспечения хороших фильтрующих и аппроксимирующих свойств алго- JQ ритм (10) необходимо выбирать ширину интервала осреднения Slg или, что то же, дискретность и С и число измерений N,, приходящихся на интервал осреднения, такой, чтобы выполнялось соотношением
N, й27/1/Јс и N, 4С « 1/о( ,
где fc - частота среза полосы пропускания системы управления.
55
7
12
Таким образом, вопрос о излучении аппроксимационных оценок измеряемого сигнала сводится к многократному интегрированию с последующей обработкой по алгоритму (9). Операция многократного интегрирования сводится к многократному суммированию в случае дискретного поступления измерительной информации. Пусть at1- период дискретизации поступления информации
i/Ctj) Cf(i df), и пусть ins| N, где W,-l - число измерений, приходящихся на интервал осреднения Я5. Тогда соотношения (9) , (91) с учетом дискретности поступления информации могут быть представлены в виде:
SS(N,, tt) -Јst(Nlt tj;
S,(I, t,) - rf S,(N,, tK).
Учитьшая тот факт, что оценки,получаемые по соотношениям (J 0) , формируются с запаздыванием на й- 0,5 (N.,-1) д - секунд, а производные от оцениваемого сигнала обладают прогнозирующими свойствами, можно записать:
(t,) 51eaJ(t)flJ;
Ч (t,) Ј- (ID
9 (t,) - 3(t.) - U (u(t,)) (12)
13
Следовательно, закон управления (5) может быть реализован с требуемым качеством.
Предлагаемый закон управления (5) с учетом (10) и (11) реализуется устройством для стабилизации объекта управления, функциональная схема которого представлена на фиг.1, следующим образом.IQ
Сигнал К t tf. снимается с выхода усилителя 7, сигнал Кг /,| снимается с выхода усилителя 5, а сигнал К3&|снимается с выхода усилителя 11. С выхода усилителя 6 при открытом ключе 15 снимается сигнал . Сигналы if и 9 . формируются на выходах блока 10 экстраполяции, входными сигналами которого являются ao(f), at(t) и a 2(t), формируемые на выходах фильтруют - дифференцирующего блока 9 и поступающие на первые три входа блока Ю, а также сигнал u.(t), поступающий с выхода сумматора 8 на четПрелла гаемое устройств работает следуюшим образом.
В обычных условиях работа осущес вляется аналогично известному: инфо мация с датчика 3 угла и датчика 2 угловой скорости суммируется на сум маторе 8 после усиления усилителями 6 и 7 и поступает на вход блока 4 исполнительных органов. При необходимости организации режима точной стабилизации включают блок 12 запуска, разрешающий сигнал с которого поступает в фильтрующе-дифференциру- ющий блок 9 и запускает генератор 36 тактовых импульсов, начинающий выдавать синхроимпульсы со скважностью Л€ . Одновременно сигнал с блока 12 запуска задерживается элементом S3 задержки на секунд, необходимых для заполнения блоков 16-18 стековой памяти информацией, что способствует обеспечению необходимого качества информации на выхо15
20
вертый вход блока 10, Блок 10 экстра-25 Де блока 9, и через инвертор 14 закрывает ключ 15, прекращая доступ - сигнала /.. Одновременно открываются ключи 39 и 40 в блоке 10 экстра
поляции по существу реализует выражения (11) и (12) Фильтрующе-дифференцирующий блок 9 реализует .алгоритм (10), причем блоки 16-18 стековой памяти осущетвляют соответст- венно накопление сумм S 1} S и Sj. Сигналы, снимаемые с первых выходов этих блоков , соответствуют S g(N ,, t) 1 1,2,3, а с последних выходов - Se(J, t;), I 1,2,3. Делитель 35 напряжения имеет коэффициент передачи J/(N)-1), усилитель 28 - коэффициент передачи , усилитель 29 - коэффициент передачи /Ji5 усилитель 30 - коэффициент передачи р3, уси- литель 31 - коэффициент передачи рг, делитель 34 напряжения (при определенных условиях может потребоваться усилитель )- коэффициент передачи , а усилитель 27 - коэффициент пере- дачи усилитель 33 - коэффициент усиления 2, а усилитель 32 - , коэффициент передачи tf.
Таким образом, на выходе сумматот ра 19 формируется oU S А ,,t ;) - -otj S,(l, t;), на выходе сумматора 20 Sл(N„,:,) - 5,0, t;), на выходе сумматора 21 S, (N ,, t ;) +5,(1,С;), на выходе сумматора 23 8г(1 , t f) -S1(N1-1, t;), на выходе сумматора 24 ,) + /isSj/l , t ;), а на выходе сумматора 25 S (N, ,t,-) - - S3(l, t ,).
IQ
289/
Прелла гаемое устройств работает следуюшим образом.
В обычных условиях работа осуществляется аналогично известному: информация с датчика 3 угла и датчика 2 угловой скорости суммируется на сумматоре 8 после усиления усилителями 6 и 7 и поступает на вход блока 4 исполнительных органов. При необходимости организации режима точной стабилизации включают блок 12 запуска, разрешающий сигнал с которого поступает в фильтрующе-дифференциру- ющий блок 9 и запускает генератор 36 тактовых импульсов, начинающий выдавать синхроимпульсы со скважностью Л€ . Одновременно сигнал с блока 12 запуска задерживается элементом S3 задержки на секунд, необходимых для заполнения блоков 16-18 стековой памяти информацией, что способствует обеспечению необходимого качества информации на выхо15
20
Де блока 9, и через инвертор 14 за
крывает ключ 15, прекращая доступ - сигнала /.. Одновременно открываются ключи 39 и 40 в блоке 10 экстра/ /
поляции и сигналы ц. и в.- поступают на вход сумматор 3, об спечи- s вая тем самым непрерывное формирование управляющей информации.
Особо следует остановиться на работе блоков 16 (17,18) стековой памяти, организующих формирование
сумм S (N,, t,)
и
И, t;), 1
i.2,3. Вариант функциональной схемы такого блока представлен на Фиг.2 которая содержит N, аналоговых запоминающих элементов на операционных усилителях с емкостной обратной связью, N1-5 -го элемента задержки на Ј Ј . секунд ( д С . - время гарантиffЛ
рованной передачи информации из одного запоминающего элемента Б другой), N., ключей и сумматора. Измерительный сигнал поступает на первый вход блока, з синхроимпульсы на второй, вход блока (условием технической реализуемости блока imp; выбора скважности Л t тактового генератора является условие (N ,-1) Л С # д } Блок работав следующим образом. При поступлении тактового импульса последова- переписывается информация из запоминающих элементов (ЗЭ) с большими номерами в ЗЭ с меньшими номерами (информация сдвигается в соответствии с работой стековых запоминающих
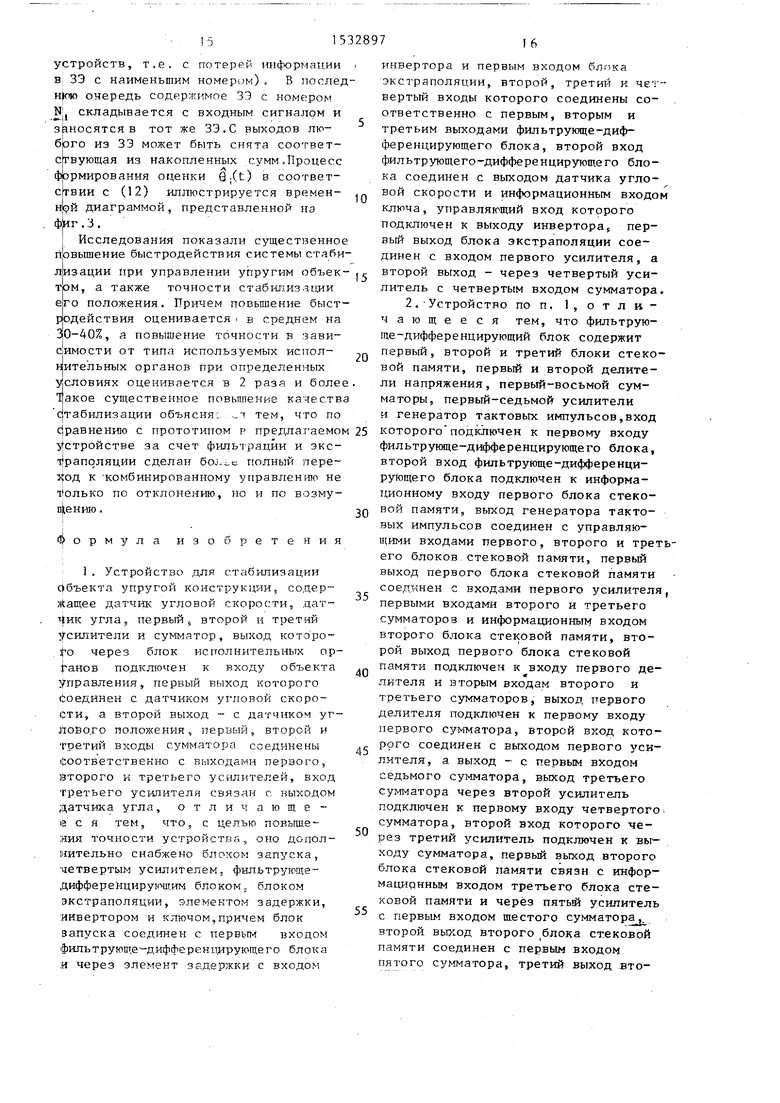
устройств, т.е. с потеррй информации в 33 с наименьшим номером) . В последние очередь содержимое ЗЭ с номером NJ складывается с входным сигналом и заносятся в тот же ЗЭ.С выходов лю брго из 33 может быть снята соответствующая из накопленных сумм.Процесс формирования оценки Q.(t) в соответ- с (12) иллюстрируется времен- нрй диаграммой, представленной на .3.
Исследования показали существенное повышение быстродействия системы стабилизации при управлении упругим объек- том, а также точности стабилизации ejro положения. Причем повышение быстродействия оценивается в среднем на 30-40%, а повышение точности в зависимости от типа используемых испол- нительных органов при определенных условиях оценивается в 2 раза и более Такое существенное повышение качества стабилизации объясня. тем, ч го по с равнению с прототипом р предлагаемом Устройстве за счет фильтрации и экстраполяции сделан 6oj.c полный переход к комбинированному управлению не только по отклонению, но и по возмупЦению.
Формула изобретения
,-,
r 0 5
0
5
Q с
0
5
инвертора и первым входом блока экстраполяции, второй, третий к четвертый входы которого соединены соответственно с первым, вторым и третьим выходами фильтрующе-диф- ференцирующего блока, второй вход фильтрующего-дифференцирующего блока соединен с выходом датчика угловой скорости и информационным входом ключа, управляющий вход которого подключен к выходу инвертора, первый выход блока экстраполяции соединен с входом первого усилителя, а второй выход - через четвертый усилитель с четвертым входом сумматора.
памяти подключен к входу первого де«
лителя и вторым входам второго и третьего сумматоров, выход первого делителя подключен к первому входу первого сумматора, второй вход которого соединен с выходом первого усилителя, а выход - с первым входом седьмого сумматора, выход третьего сумматора через второй усилитель подключен к первому входу четвертого сумматора, второй вход которого через третий усилитель подключен к выходу сумматора, первый выход второго блока стековой памяти связи с информационным входом третьего блока стековой памяти и через пятый усилитель с первым входом шестого сумматора второй выход второго лока стековой памяти соединен с первым входом пятого сумматора, третий выход второго блока стековой памяти связан через четвертый усилитель с вторим .входом шестого сумматора и вторым входом пятого сумматора, выход шестого сумматора связан с вторым входом седьмо-. го сумматора, третий вход которого соединен через седьмой усилитель с выходом восьмого сумматора, первый и второй выходы третьего блока стековой памяти соединены соответственно с первым и вторым входами восьмого сумматора, выход второго сумматора через второй делитель подключен к первому выходу фильтрующе-дифференцирующего блока, второй выход которого соединен с выходом четвертого сумматора, а третий выход - через шестой усилитель с выходом седьмого сумматора.
апериодическое звено и элемент задерки, причем первый вход блока экстраполяции соединен с информационными входами первого и второго ключей, второй вход соединен с первым входом первого сумматора, третий вход соединен с вторыми входами первого и второго сумматоров, четвертый вход соединен с третьими входами первого и второго сумматоров, пятый вход блока экстраполяции связан через элемент задержки с входом апериодического звена, а шестой вход - с четвертым входом второго сумматора, выход апериодического звена подключен к первому входу второго сумматора, выходы первого и второго сумматоров связаны с соответствующими управляющими входами первого и второго ключей, выходы которых соединены соответственно с первым и вторым выходами блока экстраполяции.
Фиг. г
| Кузовков Н.Т | |||
| Системы стабилизации летательных аппаратов | |||
| М,: Машиностроение, 1976, с | |||
| Веникодробильный станок | 1921 |
|
SU53A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
