и 27, два нуль-индикатора 8 и 24, блок 7 источников постоянных напряжений, блок 12 запуска, датчик 14 отклонения упругого элемента, дифференцирующий элемент 15, три умно.1 .
Изобретение относится к управлению движением динамических объектов, а именно объектов с присоединенными упругими элементами.
Цель изобретения - повышение точ- ности управления упругим элементом при наличии действующих на него внешних возмущений и расширение функциональных возможностей устройства.
На фиг, 1 представлена функцио- нальная схема адаптивного устройства для управления объектом с присоеди- ненным упругим элементом, на фиг,2 - зависимость управляющих воздействий на объект в течение одного периода колебаний, на фиг, 3 - фазовая точка плоскости, отображающая поведение упругого элемента; на фиг, 4 - типовые переходные процессы управляемого изменения нагружающей силы,
Устройство содержит объект 1 управления, присоединенный упругий элемент 2, блок 3 исполнительных органов, первый сумматор 4, первый аналоговый ключ 5, второй аналоговый ключ 6, блок 7 источников постоянных напряжений, первый нуль-индикатор 8, второй сумматор 9, элемент НЕ 10, делитель 11 напряжения, блок 12 запуска, первый триггер 13, датчик 14 от- клонения упругого элемента, дифференцирующий элемент 15, первый умножитель 16, делитель 17, третий сумматор 18, второй умножитель 19, компаратор 20, коммутатор 21, элемент И 22, третий аналоговый ключ 23, второй нуль-индикатор 24, третий умножитель 25, усилитель 26, второй триггер 27,
Блок 7 постоянных напряжений содержит пять источников постоянных напряжений 28-32,счетный триггер 33„ четыре аналоговых ключа 34-37, два сумматора 38 и 39,
Коммутатор 21 содержит элементы И 40 и 41, элемент ИЛИ 42, Делитель 17
1297020жителя 16, 19, 25, делитель 17, усилитель 26, компаратор 20, три- элемента И 22, .40, 41, элемент ИЛИ 42, делитель 11 напряжения. 1 з.п. ф-лы 5 4 ил.
и дифференцирующий элемент 15 реализуются с использованием операционных усилителей, а все умножители могут использоваться в виде стандартных блоков, В качестве датчиков положения упругого элемента могут быть использованы тензодатчики,
С достаточной степенью приближения динамика объекта управления (твердого тела) с присоединенным упругим элементом описьгаается уравнениями Ликин за
(ь d-a q + и
|q - + pax,
где x(t) - фазовая координата объекта
управления ,q(t) - обобщенная координ та упругого элемента, сО - циклическая частота колебаний упругого элемента а - коэффициент взаимовлияния объекта управления и упругого элемента, c(L. Р - параметры, определяющие
массово-инерционные характеристики объекта и упругого элементаj
U(t) - текущая величина управляющего ускорения,
В модели предполагается, что коэффициент диссинации упругого эле- мента очень мал.
Производя взаимную подстановку уравнений, входящих в систему (1), и проводя несложные преобразования, получают следующую систему
X -Ь Ы q + с и .q + bU
(2)
b, ot-a/(1-dL)3aM ; b (3a/(1-et.pa2) - постоянный параметр, определяющий влияние нагружающей силы на динамику упругого элемента .
( l-d-pa) - постоянный параметр ио -cjb квадрат приведенной циклической частоты колебаний упругого элемента.
При этом состояние упругого эле- мента с минимальной полной энергией (потенциальной и кинетической), со- ответствующее требуемому установившемуся значению нагружающей силы U определяется точкой р О на фазовой плоскости q,;q/cO, где ( b /оо,
называемой точкой динамического равновесия {в ней компенсируются потенциальная и кинетическая энергии).
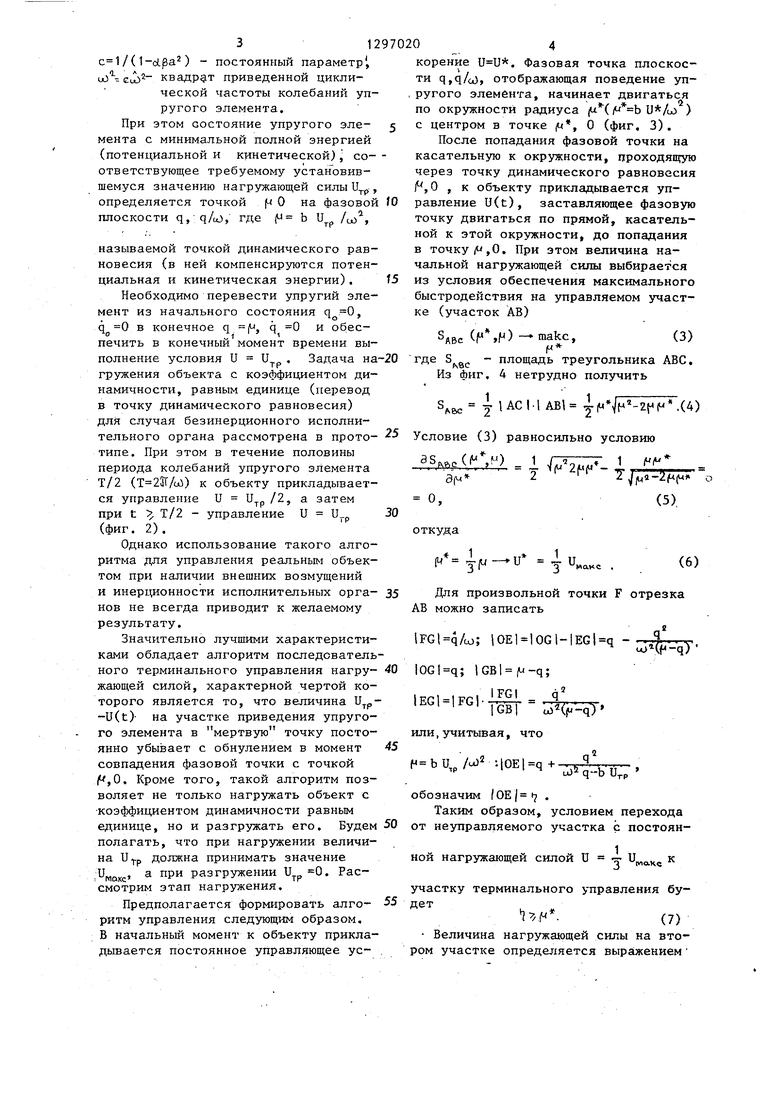
Необходимо перевести упругий элемент из начального состояния , q 0 в конечное q f, q 0 и обеспечить в конечный момент времени выполнение условия и и , Задача на груженая объекта с коэффициентом динамичности, равным единице (ггеревод в точку динамического равновесия) для случая безинерционного исполнительного органа рассмотрена в прото- типе. При этом в течение половины периода колебаний упругого элемента Т/2 (T 2liT/oi)) к объекту прикладывается управление U , а затем при t , Т/2 - управление U (фиг. 2).
Однако использование такого алгоритма для управления реальным объектом при наличии внешних возмущений и инерционности исполнительных орга- нов не всегда приводит к желаемому результату.
Значительно лучщими характеристиками обладает алгоритм последовательного терминального управления нагру- жающей силой, характерной чертой которого является то, что величина -U(t)- на участке приведения упругого элемента в мертвую точку постоянно убывает с обнулением в момент совпадения фазовой точки с точкой ,0, Кроме того, такой алгоритм позволяет не только нагружать объект с коэффициентом динамичности равным единице, но и разгружать его. Будем полагать, что при нагружении величина U-pp должна принимать значение Р разгружении 0. Рассмотрим этап нагружения.
Предполагается формировать алго- ритм управления следующим образом, В начальный момент к объекту прикладывается постоянное управляющее ус-
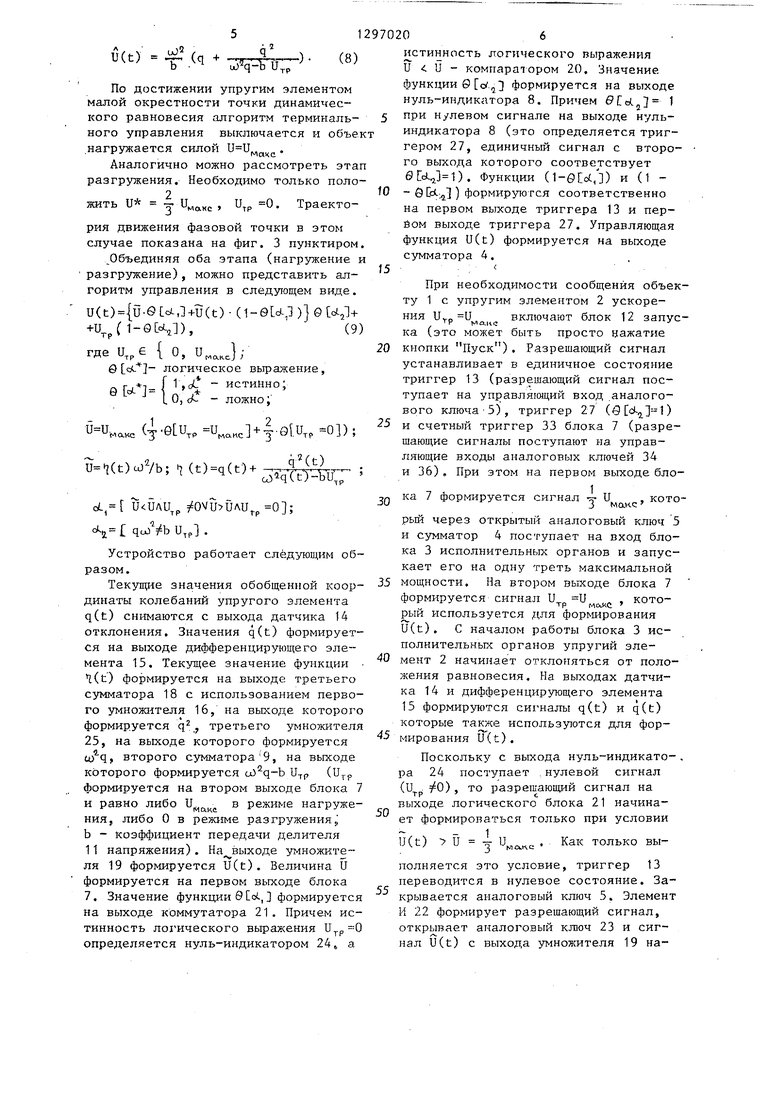
корение . Фазовая точка плоскости q,q/a), отображающая поведение уп- , ругого элемента, начинает двигаться по окружности радиуса (( ) с центром в точке |М, О (фиг, 3),
После попадания фазовой точки на касательную к окружности, цроходящую через точку динамического равновесия l, О , к объекту прикладывается управление U(t), заставляющее фазовую точку двигаться по прямой, касательной к этой окружности, до попадания в точку/f,0. При этом величина начальной нагружающей силы выбирается из условия обеспечения максимального быстродействия на управляемом участке (участок АВ)
SABC ( ЧР)--make,(3)
М где , - площадь треугольника ABC,
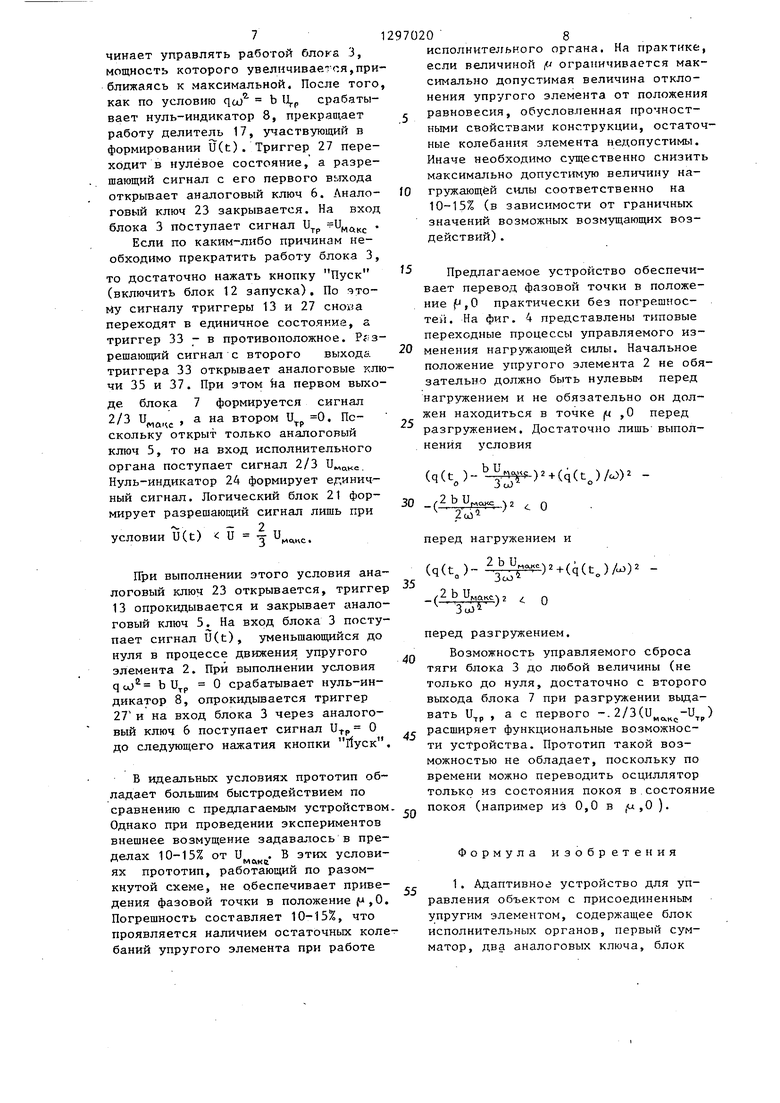
Из фиг. 4 нетрудно получить SftBc 7 UCl-l АВ1 .(4 Условие (3) равносильно условию
О,
iufl-2f(ui« (5)
откуда
л. IT IT
|Ч p-H-u -j U
(6)
Для произвольной точки F отрезка АВ можно записать
); iOEl OGl-|EG| q - Д/ V
ujHf-q;
i OG q; 1 GB1 /ч-q; lEGl lFGl
1GB1 u)4( или,учитывая, что
,;/cO :lOE| q. -.Д....,
обозначим ,
Таким образом, условием перехода от неуправляемого участка с постоянной нагружающей силой U - макс
участку терминального управления будет
xf.(7)
Величина нагружающей силы на втором участке определяется выражением
U(t) (q
uj q-Ъ U.j
-)
(8)
По достижении упругим элементом малой окрестности точки динамического равновесия алгоритм терминального управления вьЕключается и объект .нагружается силой ,, .
Аналогично можно рассмотреть этап разгружения. Необходимо только положить и j и,ак,,
UTP 0.
Траектория движения фазовой точки в этом случае показана на фиг. 3 пунктиром. Объединяя оба этапа (нагрзгжение и разгружение), можно представить алгоритм управления в следующем виде.
U(t)(,+U(t) (1-@U,1 ) 0 К1+ ( ),(9)
где U,,e { О,
0 логическое вьфшкение,
j ( 1 o истинно;
i 0) ложно;
Q C
(т бСи.р .Kc + -3-slu,,
(t)cjVb; (t)q(t) +
4t)
a)iq (ty--b Up
й1, quoVbU.p.
Устройство работает следующим образом.
Текущие значения обобщенной координаты колебаний упругого элемента q(t) снимаются с выхода датчика 14 отклонения. Значения q(t) формируется на выходе дифференцирующего элемента 15. Текущее значение функции Z(t) формируется на выходе третьего сумматора 18 с использованием первого умножителя 16, на выходе которого формируется q третьего умножителя 25, на выходе которого формируется U)q, второго сумматора 9, на выходе которого формируется (UTP формируется на втором выходе блока 7 и равно либо и в режиме нагруже- ния, либо О в режиме разгружения, b - коэф4эициент передачи делителя 11 напряжения). На выходе умножителя 19 формируется U(t). Величина U формируется на первом выходе блока 7. Значение функции 9 Cot, 3 формируется на выходе коммутатора 21, Причем истинность ло1 ического выражения U.p 0 определяется нуль-индикатором 24, а
истинность логического выражения и и - компараюром 20. Значение функции 0 (У.3 формируется на выходе нуль-индикатора 8. Причем 0CoL } 1 при нулевом сигнале на выходе нуль- индикатора 8 (это определяется триггером 27, единичный сигнал с второ- го выхода которого соответствует 0 ). Функции (1-(9Co(J) и (1 - 0 d.. ) формируются соответственно на первом выходе триггера 13 и первом выходе триггера 27. Управляющая функция U(t) формируется на выходе сумматора 4.
; ;
При необходимости сообщения объекту 1 с упругим элементом 2 ускорения и , включают блок 12 запуска (это может быть просто нажатие
кнопки Пуск). Разрешающий сигнал устанавливает в единичное состояние триггер 13 (разрешающий сигнал поступает на управлягадий вход, аналогового ключа-5), триггер 27 (Q ,-1)
и счетный триггер 33 блока 7 (разрешающие сигналы поступают на управляющие входы аналоговых ключей 34 и 36), При этом на первом выходе блока / формируется сигнал ;,
рый через открытый аналоговый ключ 5 и сумматор 4 поступает на вход блока 3 исполнительных органов и запускает его на одну треть максимальной мощности. На втором выходе блока 7 формируется сигнал U U , котоТр MIXKC
рый используется для формирования U(t), С началом работы блока 3 исполнительных органов упругий элемент 2 начинает отклоняться от положения равновесия. На выходах датчика 14 и дифференцирующего элемента 15 формируются сигналы q(t) и q(t) которые также используются для формирования 1Г( С),
Поскольку с выхода нуль-индикатора 24 поступает ,нулевой сигнал
ка 7 формируется сигнал - U , кото50
(и 0), то разрешающий сигнал на выходе логического блока 21 начинает формироваться только при условии
Как только вы
u(t) и I и„,
полняется это условие, триггер 13 переводится в нулевое состояние. Закрывается аналоговый ключ 5. Элемент И 22 формирует разрешающий сигнал, открывает аналоговый ключ 23 и сигнал U(t) с выхода умножителя 19 начинает управлять работой блока 3, мощность которого увеличивается,приближаясь к максимальной. После того как по условию qco b срабатывает нуль-индикатор 8, прекращает работу делитель 17, участвующий в формировании U(t). Триггер 27 переходит в нулевое состояние, а разрешающий сигнал с его первого выхода открывает аналоговый ключ 6. Аналоговый ключ 23 закрывается. На вход блока 3 поступает сигнал и, . Если по каким-либо причинам необходимо прекратить работу блока 3,
то достаточно нажать кнопку Пуск (включить блок 12 запуска). По -этому сигналу триггеры 13 и 27 снова переходят в единичное состояние, а триггер 33 - в противоположное. Рг-з- решающий сигнал с второго выхода триггера 33 открывает аналоговые ключи 35 и 37. При этом а первом выходе блока 7 формируется сигнал 2/3 и„а.« и втором U 0, Пс- скольку открыт только аналоговый ключ 5, то на вход исполнительного органа поступает сигнал 2/3 Нуль-индикатор 24 формирует единичный сигнал. Логический блок 21 формирует разрешающий сигнал лишь при
условии U(t) и I и.
При выполнении этого условия аналоговый ключ 23 открывается, триггер 13 опрокидывается и закрывает аналоговый ключ 5. На вход блока 3 поступает сигнал U(t), уменьшающийся до нуля в процессе движения упругого элемента 2. При выполнении условия qoj b О срабатывает нуль-индикатор 8, опрокидывается триггер 27 и на вход блока 3 через аналоговый ключ 6 поступает сигнал О до следующего нажатия кнопки Йуск
В рздеальных условиях прототип обладает большим быстродействием по сравнению с предлагаемым устройством Однако при проведении экспериментов внешнее возмущение задавалось в пределах 10-15% от U| . В этих условиях прототип, работающий по разомкнутой схеме, не обеспечивает приведения фазовой точки в положение ,0. Погрешность составляет 10-15%, что проявляется наличием остаточных коле баний упругого элемента при работе
иcпoлнитeJrьнoгo органа, На практике, если величиной ограничивается максимально допустимая величина отклонения упругого элемента от положения с равновесия, обусловленная прочностными свойствами конструкции, остаточные колебания элемента недопустимы. Иначе необходимо существенно снизить максимально допустимую величину на- O гружающёй соответственно на 10-15% (в зависимости от граничных значений возможных возмущающих воздействий) .
5 Предлагаемое устройство обеспечивает перевод фазовой точки в положение р,0 практически без погрешностей. На фиг. 4 представлены типовые переходные процессы управляемого из0 менения нагружающей силы. Начальное положение упругого элемента 2 не обязательно должно быть нулевым перед нагружением и не обязательно он должен находиться в точке |Ц ,0 перед разгружением. Достаточно лишь выполнения условия
(q(t))2+(q(t-)/)2 0 (2bU.
5
2coi
- с О
35
перед нагружением и
(q(tj- )2+(q(tJ/)2 -(2,Л.-а)г . о
перед разгружением.
Возможность управляемого сброса тяги блока 3 до любой величины (не только до нуля, достаточно с второго выхода блока 7 при разгружении выдавать , а с первого -. 2/3()
расширяет функциональные возможности устройства. Прототип такой возможностью не обладает, поскольку по времени можно переводить осциллятор только из состояния покоя в состояние
покоя (например из 0,0 в (U,0 ).
Формула изобретения
1. Адаптивное устройство для управления объектом с присоединенным упругим элементом, содержащее блок исполнительных органов, первый сумматор, два аналоговых ключа, блок
91
источников постоянных напряжений, первый триггер, выход блока исполнительных органов является выходом устройства для подключения к объекту, вход блока исполнительных органов соединен с выходом первого сумматора, выходы первого и второго аналоговых ключей соединены с входами первого и второго слагаемых первого сумматора соответственно, первый и вто- рой выходы блока источников постоянных напряжений соединены с информационными входами первого и второго аналоговых ключей соответственно, выход первого триггера соединен с управляющим входом первого аналогового ключа, отличающееся тем, что, с целью повышения точности управления упругим элементом при наличии действующих на него внешних возмущений и расширения функциональных возможностей устройства, в него введены датчик отклонения упругого элемента, дифференцирующий элемент, три умножителя, делитель, два сумма- тора, компаратор, коммутатор, два нуль-индикатора, усилитель, третий аналоговый ключ, элемент И, второй триггер, элемент НЕ, делитель напря- женин, блок запуска, причем вход дат чика отклонения является входом устройства для подключения упругого элемента, выход датчика отклонения соединен с входами первого слагаемого .третьего сумматора и первого сомно- жителя третьего умножителя и с входо дифференцирующего элемента, выход дифференцирующего элемента соединен с входами первого и второго сомножите
лей первого умножителя, выход перво-40 первого по четвертый источников постоянных напряжений соединены с информационными входами с nepjsoro по четвертый аналоговых ключей соответственно, первый выход счетного триггера соединен с управляющими входами первого и третьего аналоговых ключей, второй выход счетного триггера соединен с управляющими входами второго и четвертого аналоговых ключей, выходы первого и второго аналоговых ключей соединены с входами первого и второго слагаемых первого суммато- ра соответственно, выходы третьего и четвертого аналоговых ключей соединены с входами первого и второго слагаемых второго сумматора соответственно, выходы первого и второго сумматоров являются вторым и первым выходами блока соответственно.
го .умножителя соединен с входом делимого делителя, выход третьего умножителя соединен .с входом первого слагаемого второго с тиматора, выход второго сумматора соединен с входом 45 делителя и через первый нуль-индикатор - с входом блокировки делителя и с входом сброса второго триггера, выход делителя соединен с входом второго слагаемого третьего сумматора, 50 выход третьего сумматора соединен с входом первого сомножителя второго умножителя, выход которого соединен с первым входом компаратора и информационным входом третьего аналогово- 55 го ключа, выход которого соединен с входом третьего слагаемого первого сумматора, выход компаратора соединен с информационным входом коммута0
тора,
10
выход которого соединен с первыми входами элемента И устройства и с входом установки первого триггера, выход элемента И устройства соединен с управляющим входом третьего аналогового ключа, прямой и инверсный выходы второго триггера соединены с управляющим входом второго аналогового ключа и с вторым входом элемента И устройства соответственно, второй выход блока источников постоянных напряжений соединен с входами второго нуль-индикатора и делителями напряжения, выход второго нульиндикатора соединен с управляющим входом коммутатора, выход делителя напряжения соединен череэ элемент НЕ с входом второго слагаемого второго сумматора, выход блока запуска соединен с входами установки первого и второго триггеров И и с входом пуска блока источников постоянных напряжений, первый выход которого соединен с вторым входом компаратора, третий выход блока источников постоянных напряжений соединен с входом второго сомножителя третьего умно- жителя и через усилитель- с входом втор го умножителя,
2. Устройство по п. 1, отличающееся тем, что блок источников постоянных напряжений содержит пять источников постоя ннык напряжений, счетный триггер, четыре аналоговых ключа, два сумматора,при- чем вьпсод пятого источника постоянных напряжений является третьим выходом блока, вход счетного триггера является входом пуска блока, выходы с
Ф1п.г
фт.З
фшА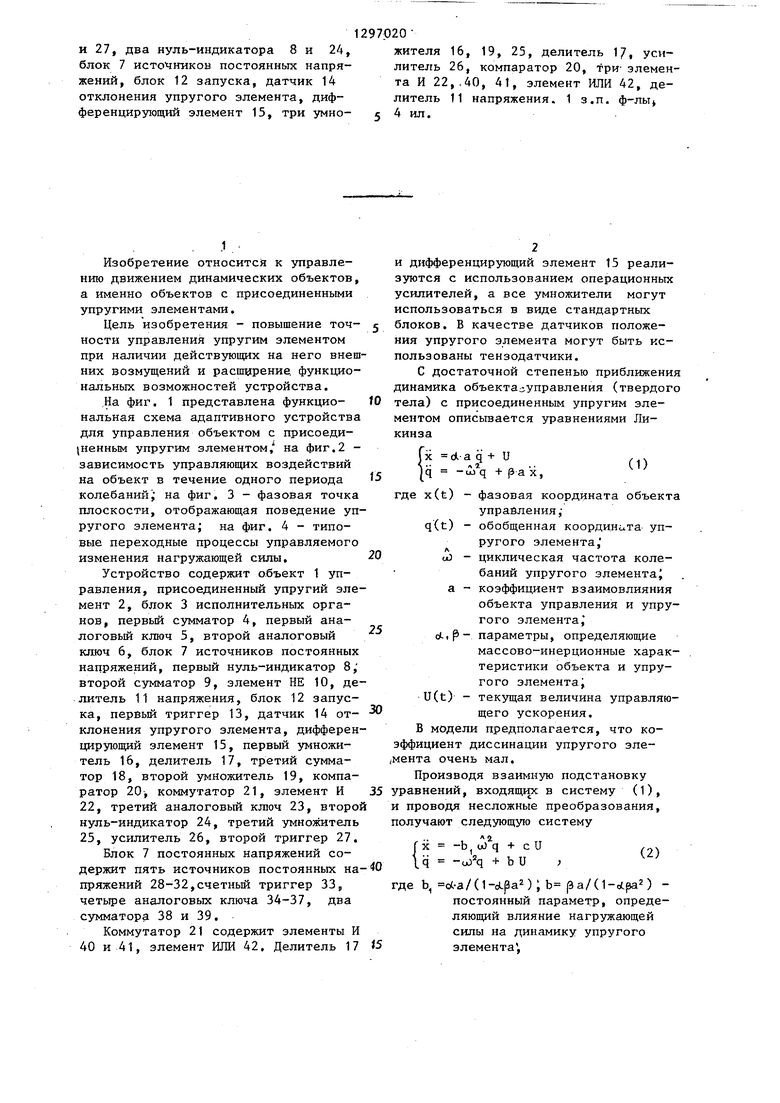
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для оптимального управления работой инерционного объекта с присоединенным упругим элементом | 1985 |
|
SU1381445A1 |
| Устройство для оптимального управления работой инерционного объекта с присоединенным упругим элементом | 1989 |
|
SU1659981A2 |
| Система терминального управления упругим объектом | 1987 |
|
SU1434403A1 |
| Устройство для измерения динамических характеристик | 1983 |
|
SU1168902A1 |
| Цифровой измеритель задержки | 1980 |
|
SU930219A2 |
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ КОЛЕБАНИЙ УПРУГОГО ЭЛЕМЕНТА ПЕРЕМЕННОЙ ЖЁСТКОСТИ | 2003 |
|
RU2249244C2 |
| Телевизионный цветосинтезатор | 1985 |
|
SU1284006A1 |
| Устройство для взвешивания движущихся объектов | 1990 |
|
SU1789877A1 |
| Цифровой измеритель центра тяжести видеосигналов | 1990 |
|
SU1723559A1 |
| Аналого-цифровой преобразователь | 1986 |
|
SU1451857A1 |

Изобретение относится к управлению движением динамических объектов , а именно объектов с присоединенными упругими элементами. Целью изобретения является повьппение точности управления упругим элементом при наличии действующих на него внешних возмущений и расширение функциональных возможностей устройства.Устройство подключается к объекту 1 управления с присоединенным упругим элементом 2 и содержит блок 3 исполнительных органов, три сумматора 4, 9, 18, три аналоговых ключа 5, 6, 23, элемент НЕ триггера 13 с сл ю о- o о 0f.f
| Алексеенко А.Г | |||
| и др | |||
| Применение прецизионных аналоговых интегральных схем | |||
| М.: Радио и связь,1981 | |||
| Блок операций перемножения ОП-ЗМ | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Клокова Н.П | |||
| и др | |||
| Тензодатчики для экспериментальных исследований | |||
| М.: Машиностроение, 1972 | |||
| Троицкий В.А | |||
| Режим оптимального нагружения упругого объекта | |||
| Оптимальные процессы колебаний механических систем | |||
| Л.: Машиностроение, 1976, с | |||
| Способ получения борнеола из пихтового или т.п. масел | 1921 |
|
SU114A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
