О1
ю
ел
О5
v|
О5
Изобретение относится к системам управления угловым движением динами- ческих объектов, а именно к системам стабилизации углового положения объектов с присоединенными упругими элементами конструкции.
Цель изобретения - повышение точности управления в процессе стабилизации углового положения объекта с упругим элементом конструкции. На фиг. 1 изображена функциональ- :Ная схема предлагаемой системы стабилизации; на фиг, 2 -фазовый портрет движения системы стабилизации.
Система стабилизации содержит объект 1 управления с присоединенным упругим элементом 2, блок 3 исполнительных органов, датчик А угла, датчик 5 угловой скорости, первый 6 и второй 7 усилители, первый 8 и второй Э сумматоры, датчик 10 отклонений упругого элемента, дифференцирующий блок П, блок 12 формирования закона управления, блок 13 формирова- ния терминального управления и блок 14 формирования компенсирующего управления.
Блок 12 формирования закона управ- ления содержит сумматор 15, первый 1б и второй 17 формирователи модуля сигнала, компаратор 18, первую 19, вторую 20 и третью 21 схемы сравнения знаков сигналов, первый 22 и второй 23 элементы И, первый 2k, второй 25 и третий 26 ключи.
Блок 1,3 формирования терминального управления содержит первый 27 и второй 28 квадраторы, первый 29 и второй 30 делители, первый 31 и второй 32 множители и сумматор 33.
Блок 14 формирования компенсирующего управления содержит первый 3 и второй 35 множители и сумматор Зб«
Суть изобретения в следующем. Динамика процесса угловой одноканальной стабилизации объекта с учетом основно низкочастотной формы колебаний присоединенного к нему упругого элемента описывается следующей системой дифференциальных уравнений
Icf+aq Mv,; mq+bq+cq+acp 0, q и ЦР - текущие
(1)
рассогласования по углу и угловой скорости объекта управления; и q - текущие отклонения, скорость и ускорение относительного движения присоеди
0
5
0
5
35
40
упругого
.р
ненного к объекту упругого элемента соответственно; I - момент инерции объекта по
оси управления;
а коэффициент динамического взаимовлияния объекта и упругого элемента; m - массовый параметр
элемента;
b и с - соответственно диссипатив- иый и жесткостной параметры упругого элемента; Ну - управляющий момент, прикладываемый к объекту управления со стороны исполнительных органов системы стабилизации.
После разрешения системы (1) относительно старших производных и проведения несложных преобразований запишем систему уравнений в нормальной форме Коши:
Cf e(q,q)+U5.t+uUn;
а(2)
(),
где б(q,q) - возмущающее ускорение, обуслов- ; ленноединамикой упругого элемента;
традиционное пропорционально-дифференциальное стабилизирующее yrt- равление; компенсирующая управляющая добавка (компенсирующая возмущающее влияние упругого элемента);
d(l-af/(Ii7i-a)); ш
Cj2(i-a2/(Im-a)); m
А ас
,); К,0;
UU.
ЬЛ:
ab IrTi-a°
Самым простым очевидным решением формирования компенсирующего управления bU, является следующее решение:
(q,q).
Однако данное решение не учитывает тот факт, что при слабом собственном
демпфировании упругого элемента потребуется достаточно долго прикладывать компенсирующее управление, которое по величине при малых координатны рассогласованиях объекта может оказаться несоизмеримо большим самого стабилизирующего управления и, более того, противоположным ему по знаку. А следовательно, любые, даже сравнительно малые погрешности в формировании компенсирующего управления могут привести к нарушению качества стабилизации. Чтобы этого не происходило или, по крайней мере, возможности проявлен / я эффектов были сведены к минимуму, необходимо одновременно с эффективной компенсацией возмущения обеспечивать и активное демпфирование колебаний упругого элемента. Этого можно достичь за счет рационального (без ущеоба основному контуру управления) целенаправленного изменения величины компенсирующего управления в зависимости от текущегб состояния упругого элемента,, чем определяется величина и знак создаваемого возмущающего ускорения, а также от знака формируемого по состоянию самого объекта стабилизирующего управления. Дело в том, что если знаки и и 0() совпадают, то имеется возможность не прикладывать компенсирующего управления, тем более если при этом в силу особенностей колебательного движения упругого элемента будет происходить снижение амплитуды его колебаний, определяемой по формуле R(q2+q2/Q2) - Кроме того, если знаки и и 9 () противоположны, то знаки Ug. и uUcj будут совпадать, а это дает основание полагать, что если Ьуществует некоторое управление U.., позволяющее обеспечить перевод упругого элемента Е новое состояние со значительно меньшей амплитудой колебаний, и если &UT- U-r-Us-t имеет тот же знак, что и /iUo,, и, кроме того, /bUr/-5; I uUa ( 5 то вместо uUo можно
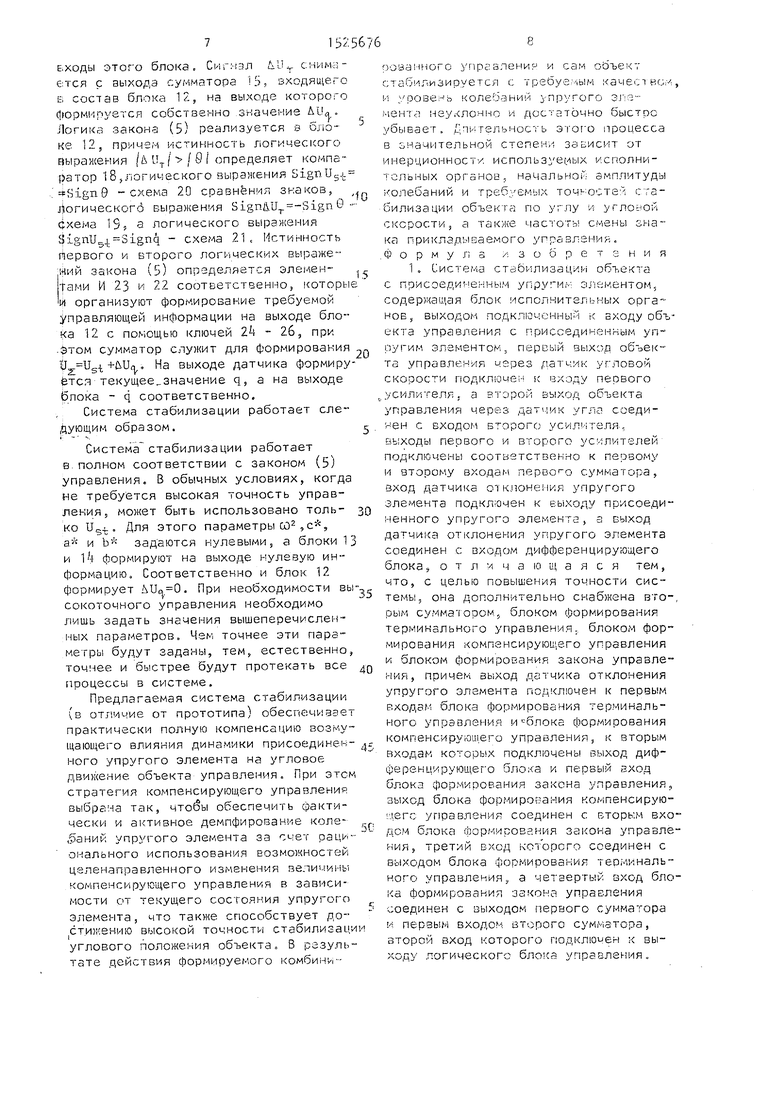
использовать u.U. , Для определения областей, где нужно использовать li, и ULU-r вместо bU, рассмотрим нормированную параметром (л) фазовую плоскость (q,q/(0) (фиг.2). Здесь прямой А-О-С обозначена линия 0(q,q)0 и следовательно, справа от нее область 9(- )0, а слева - область S(. Все что изображено на рассматриваемой фазовой плоскости, представлено для
10
15
20
, случая . Поэтому для использования управления ди пригодна лишь область, ограниченная кривой A-0-D. Учитывая сравнительную малость собственного демпфирования упругого элемента, опишем процесс .его управляемого движения .в виде . Уравнение траектории, проходящей через текущую фазовую точку (q,q) и начало координат фазовой плоскости, может быть представлено в виде
(1-от(я1), (3)
2U
где и - величина постоянного управляющего ускорения.
Разрешая (З) относительно U, получим выражения для расчета терминального управления (управления, переводящего осциллятор в .начало координат) по текущим q и q:
..
(4)
Данное выражение записано уже с учетом эффективности воздействия исполнительных органов системы стабилизации на упругий элемент. Анализ фазовой плоскости, представленной на фиг, 2, позволяет так же просто найти подобласть, в которой целесообразно использовать . Эта подобласть ограничена кривой А-О-В. Таким образом, закон формирования компенсирую- щего управления может быть представлен в виде
О, SignU5-fc Sign6ASignU5t
-Signq
, I U. U,| iQ|A SignuUT
-Sign0ASignU5t Signq(5)
. -6()
где AU U -Ust;
0,50 q2 .
,r-+q);
с Q2q
.К,Ч - -КгСр.
(6)
0
Предлагаемый закон управления реализуется системой стабилизации, функциональная схема которой пред- ; ставлена на фиг, 1, следующим образом. Сигнал, соответствующий , формируется на выходе сумматора 8. На выходе блока 13 формируется U в соответствии с выражением С), причем исходные значения параметров с и со поступают на установочные входы блока 13. С выхода блока И снимается сигнал О(q,q)aAq+b q, причем параметры а и Ь подаются на установочные
Е.ходы ЭТОГО блока. Сигнал fiUv снима- е:тся с выхода сумматора 15, входящего Б состав блока 12, на выходе которого формируется собственно значение &Ua. Логика закона (5) реализуется з блоке 12, причем истинность логического выражения /& / Q i определяет компаратор 1 8,логического выражения SignUg.i. SignS -схема 20 сравнения знаков, Логического выражения Sign&.U -Sigri0 - схема IS 5 а логического выражения SignU54- S - -g 4 схема 21, Истинность rtepBoro и второго логических выраже- мий закона (5) определяется элемен- Тами И 23 i 22 соответственно, оторые W1 организуют формирование требуемой управляющей информации на выходе блока 12 с помощью ключей 2А - 26, при -STOM сумматор служит для формирования t,Ug.+uUf, На выходе датчика формируется текущее значение q, а на выходе блока - q соответственно.
Система стабилизации работает следующим образом.
Система стабилизации работает в.полном соответствии с законом (5) управления. В обычных условиях, когда не требуется высокая точность управления , может быть использовано толь- ко Для этого параметры СО 5с, а« и задаются нулевыми, а блоки 13 и I j формируют на выходе нулевую информацию. Соответственно и блок 12 формирует . При необходимости вы сокоточного управления необходимо лишь задать значения вышеперечисленных параметров. Чем точнее эти параметры будут заданы, тем, естественно, точнее и быстрее будут протекать все процессы в системе.
Предлагаемая система стабилизации (в отличие от прототипа) обеспечизэет практически полную компенсацию возмущающего влияния динамики присоединен- ного упругого элемента на угловое движение объекта управления. При этом стратегия компенсирующего управления выбрана так, чтобы обеспечить фактически и активное демпфирование коле- ,5аний упругого элемента за смет рационального использования возможностей целенаправленного изменения вели лины компенсирующего управления в зависимости от текущего состояния упругого
элемента, что также способствует достижению высокой точности стабилизаци углового положения объекта. В результате деистВ11Я формируемого комбинированного упргвлени - и сам оЬъект стабилизируется с требуе;- Гь м качеством и уровень колебаний упругого зле- мента неуклонно и достаточно быстро убывает. Дпительиость этого процесса в значительной степе - ,и зависит от инерционности, используемых исполнительных органов, начальной амплитуды колебаний и требуемых точностей стабилизации объекта по углу и угловой скорости, а также LiacTOTbi смены знака прм {ладываемого управления. .Формула изобретения
1 , Систе. 1а cтaб iлизaЦt -i объекта с присоединенным упру ин элементом, содержащая блок исполнительных нов, выходом подключенный к входу объекта управления с приссединен;-;ь1м уп ругим элементом, первый выход объекта управления через датчик угловой скорости подклвче;- к входу первого .усилителя, а второй выход объекта управления через дат1- ик угла соединен с входом второгс; усил|--1теля., первого и второго усилителей подключень соответственно к первому и второму входам перво о сумматора, вход датчика отклонения упругого элемента подключен к выходу присоединенного упругого элемента, а выход датчика отклонения упругого элемента соединен с входом дифференцирующего блока, о т л м ч а ю щ а я с я тем, что, с целью повышения точности системы, она дополнительно снабжена вторым сумматором блоком формирования терминального управления, блоком формирования компенсирующего управления и блоком формирования закона управления, причем выход датчика отклонения упругого элемента подключен к первым входам блока формирования терминального управления и блока формирования компенсируюшего управления, к вторым входам которых подключены выход дифференцирующего блока и первый зход блока формирования закона управления, выход блока формирования компенсирую- гдегс управления соединен с вторым входом блока формирования закона управления, третий вход которого соединен с выходом блока формирования терминального управления, а четвертый вход блока формирования закона управления соединен с выходом первого- сумматора и первым входом второго сумматора, второй вход которого подключен к выходу .погического блока управления.
2, Система по п. 1, отличающаяся тем, что блок формирования закона управления, содержит сумматор, первый и второй формирователи модуля сигнала, компаратор, первый, второй и третий блоки сравнения знаков сигналов, первый и второй элементы И, первый, второй и третий ключи, причем первый вход блока формирования закона управления соединен с первым входом первого блока сравнения знаков сигналов, второй вход блока формирования закона управления соединен с первыми входами вто рого и третьего блоков сравнения знаков сигналов, информационным входом первого ключа и входом первого формирователя модуля сигнала, третий вход блока формирования закона управления соединен с первым входом сумматора, а четвертый вход - с вторым входом сумматора и вторыми входами первого и второго блоков сравнения знаков сигналов, выход сумматора связан с входом второго формирователя модуля сигнала, с вторым входом третьего блока сравнения знаков сигнала и информационным входом второго ключа, первый и второй входы компаратора связаны соответственно с выходами первого и второго формирователей модулей сигнала, выход компаратора подключен к первому входу первого элемента И, к второму входу которого подключен выход третьего блока сравнения знаков сигналов, а к третьему входу - выход первого блока сравнения знаков сигналов и первый вход второго элемента И, второй вход которого связан с выходом второго блока сравнения знаков сигналов, выход первого элемента И подключен к управляющим входам первого и второго ключей, выход второго элемента И связан с управляющим входом третьего
10
20
J5
5
0
5
0
5
ключа, информационный вход которого связан с выходами первого и второго ключей, выход третьего ключа соединен с выходом блока формирования закона управления,
3. Система по п, 1, о т л и ч а ю- щ а я с я тем, что блок формирования терминального управления содержит первый и второй квадраторы, первый и второй делители, первый и второй множители и сумматор, причем первый вход блока формирования терминального управления связан с первыми входами первого делителя и первого множителя, второй вход - с входом первого квадратора , третий вход - с входом второго квадратора и вторым входом первого множителя, а четвертый вход - с пер- вы1 входом первого делителя, второй вход которого подключен к выходу второго квадратора, а выход второго делителя соединен с первым входом второго множителя, второй вход которого подключен к выходу сумматора, первый и второй входы которого соединены соответственно с выходом первого делителя и выходом первого множителя, выход второго множителя соединен с выходом блока формирования терминального управления.
А. Система поПо1,отличаю- щ а я с я тем, что блок формирования компенсирующего управления содержит первый и второй множители и сумматор, причем первый, второй, третий и четвертый входы блока формирования компенсирующего управления связаны соответственно с первым и вторым входами первого множителя и первым и вторым входами второго множителя, первый и второй входы сумматора соединены с выходами первого и второго множителей, а выход сумматора - с выходом блока формирования компенсирующего управления . . - .
( 0
Изобретение относится к системам управления угловым движением динамических объектов, а именно к системам стабилизации углового положения объектов с присоединенными упругими элементами конструкции. Целью изобретения является повышение точности управления в процессе стабилизации углового положения объекта с упругим элементом конструкции. Система стабилизации объекта, содержащая объект управления 1 с присоединенным упругим элементом 2, блок 3 исполнительных органов, датчики угла 4 и угловой скорости 5, первый 6 и второй 7 усилители, первый 8 и второй 9 сумматоры, датчик 10 отклонения упругого элемента, дифференцирующий блок 11, дополнительно содержит блок 12 формирования закона управления, блок 13 формирования терминального управления и блок 14 формирования компенсирующего управления. 3 з.п. ф-лы, 2 ил.
| Кузовков н.Т | |||
| Система стабилизации летательных аппаратов | |||
| М.: Высшая школа, 1976. |
