Изобретение относится к области литейного производства, а именно к управлению машинами литья под давлением, и является усовершенствованием устройства по авт.св. № 1405956.
Целью изобретения является повышение производительности.
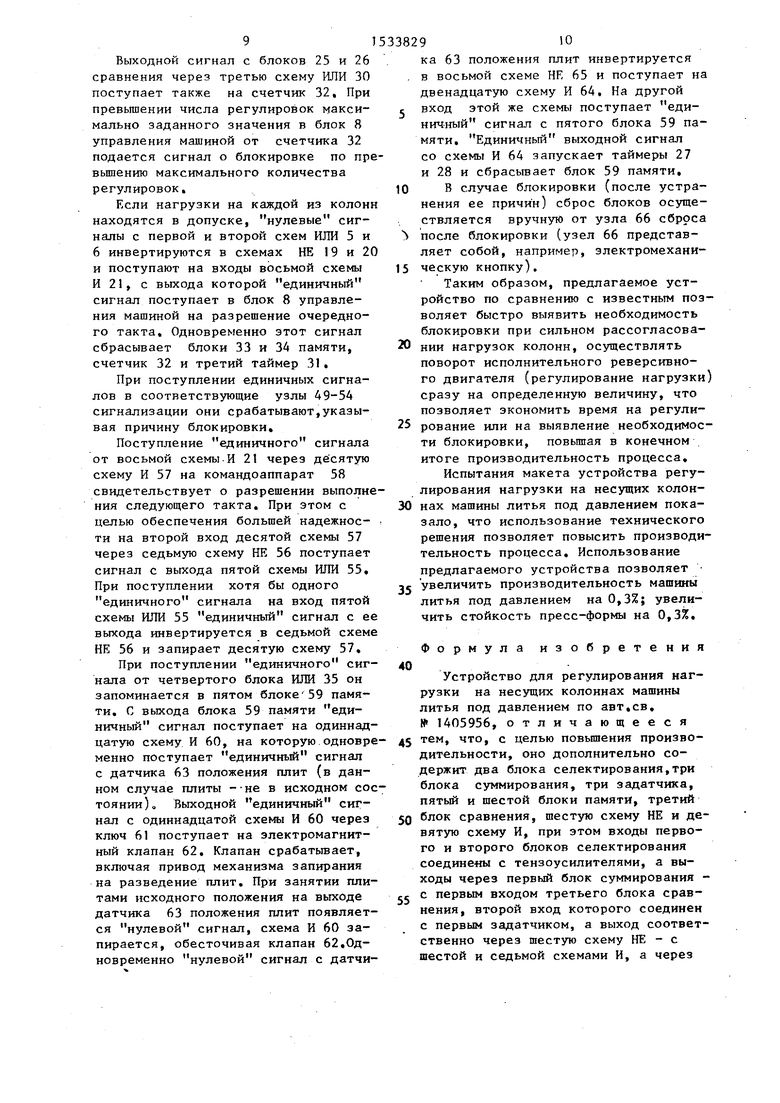
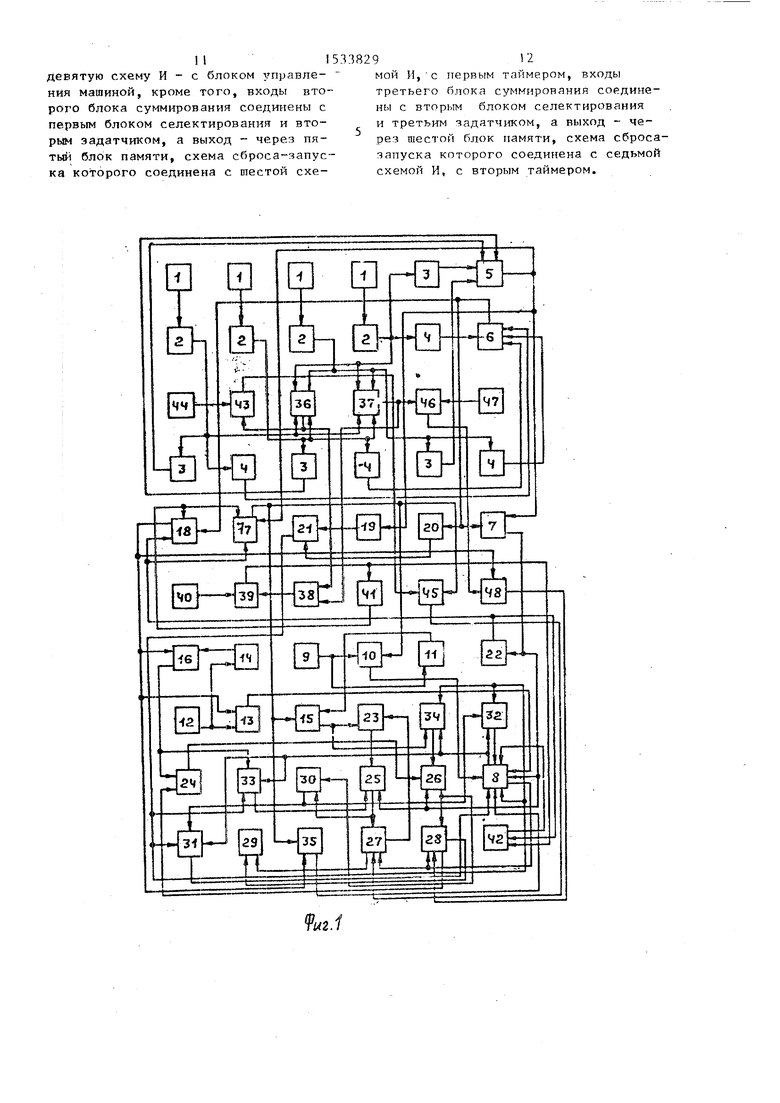
На фиг.1 приведена блок-схема устройства для регулирования нагрузки на несущих колоннах машины литья под давлением; на фиг. 2 - внутренняя структура блока управления машиной.
Устройство (фиг.1) содержит четыре датчика 1 усилий, соединенных через тензоусилители 2 с пороговыми элементами 3 и 4. Выходы максимальных пороговых элементов 3 соединены с первой схемой ИЛИ 5, а выходы минимальных пороговых 4 элементов - с второй схемой ИЛИ 6. Выходы первой и второй схем ИЛИ 5 и 6 соединены через первую схему И 7 с блоком 8 управления машиной. Первый датчик 9 положения механизма запирания соединен с первым входом второй схемы И 10 и первой схемой НЕ 11, а второй датчик 12 - с первым входом третьей схемы И 13 и второй схемой НЕ 14. Выходы второй схемы И 10 и третьей И 13 соединены с блоком 8 управления. Выходы первой 11 и второй 14 схем НЕ соединены соответственно с входами четвертой и пятой схем И 15 и 16, вторые входы которых через шестую и седьмую схему И 17 и 18 соединены с выходом первой и второй схем ИЛИ 5 и 6. Выходы первой и второй схем ИЛИ 5 и 6 соединены через третью и четвертую схему НЕ 19 и 20 с восьмой схемой И 21. Вторые входы шестой и седьмой схем И 17 и 18 соединены через пятую схему НЕ 22 с выходом первой 7 схемы И. Выходы четвертой и пятой схем И 15 и 16
N
соединены соответственно через первый и второй блоки 23 и 24 памяти, первый и второй блоки 25 н 26 сравнения с первым и вторым таймерами 27 и 28. Выходы первого и второго таймеров 27 и 28 соединены с исполнительным двигателем 29, схемами сброса первого и второго блоков 23 и 24 памяти. Схемы запуска первого и второго таймеров соединены с блоком 8 управления машиной. Выходы первого и второго блоков 25 и 26 сравнения соединены через третью схему ИЛИ ЗП с третьим таймером 31 и счетчиком 32, схемы сброса которых соединены с. блоком 8 управления машиной. Выходы третьего таймера 31 и счетчика 32 подсоединены к блоку управления машиной. Вторые входы блоков 25 и 26 соответственно через третий и четвертый блоки 33 и 34 памяти соединены с пятой и четвертой схемами И, Выходы шестой и седьмой схем И 17 и 18 соединены через четвертую схему ИЛИ 35 с блоком 8 уп- ранления машиной и непосредственно с второй и третьей схемами И 10 и 13 Выход восьмой схемы И 21 соединен с блоком 8 управления машиной,схемами сброса третьего и четвертого блоков 33 и 34 памяти,счетчика 32 и третьего таймера 31, Входы первого и второго блоков 36 и 37 селектиро- вания соединены с тензоусилителямн 2, а выходы - через первый блок 38 суммирования с первым входом третьего блока 39 сравнения, второй вход которого соединен с первым эадатчи- ком 40. Выход третьего блока 39 сравнения через шестую схему ПК 41 соединен с третьими входами шестой и седьмой схем И 17 и 18, а также через девятую схему И 42 с блоком 8 управления м-шиной.
Входы второго блока 43 суммирования соединены с первым блоком 36 се- лектирования и вторым задатчиком 44, а его выход через пятый блок 45 памяти, схема сброса-запуска которого соединена с шестой схемой И 17, - с входом ограничения работы первого 27 таймера. Входы третьего блока 46 суммирования соединены с вторым блоком 37 селектирования и третьим задатчиком 47, я его выход через шестой блок 48 памяти, схема сброса-запуска которого соединена с седьмой
0
5
0
5
0
5
0
5
схемой И 18, -с входом ограничения работы второго 28 таймера.
Клок 8 управления машиной (фиг,2) содержит узлы 49-54 сигнализации блокировки, соединенные с пятой схемой ИЛИ 55, выход которой через седьмую схему НК 56 связан с десятой схемой И 57. Второй вход десятой схемы И 57 соединен с выходом восьмой схемы И 21, а выход - с коман- доаппаратом 58. Пчтый блок 59 памяти соединен через одиннадцатую схему И 60 и ключ 61 с электромагнитным клапаном 62. Второй вход схемы И 60 соединен с датчиком 63 положения плит машины литья под давлением, который также связан с двенадцатой схемой И 64 через восьмую схему НЕ 65. Двенадцатая схема И 64 также связана с пятым блоком 59 памяти. Узел 66 сброса после блокировки соединен со схемами сброса элементов устройства,
Г
Датчики 1 усилий могут быть выполнены, например, на базе преобразователей ДСТБ-С-060, тензоусилителя 2 - на базе преобразователей Ф-8025, датчики 9, 12 и 49 положения - на базе бесконтактных датчиков типа БК,
Таймеры 27, 28 и 31 могут быть выполнены на базе блока прецизионного интегрирования типа БПИ системы АКЗСР.
Реверсивный двигатель, электромагнитный клапан и командоаппарат представляют оборудование машины литья под давлением.
Узлы 36-40 сигнализации могут быть выполнены, например, в виде ламп накаливания, остальные блоки - на базе стандартных средств вычислительной техники.
Устройство работает следующим образом.
Встроенные в колонны тенэорезис- торные датчики 1 позволяют получить электрический сигнал, пропорциональный величине нагрузки на колоннах, Поскольку усилие механизма запирания нагружает четыре несущих колонны, то измерение нагрузки на каждой колонне позволяет определить как усилие запирание для всей машины, так и величину нагрузки каждой колонны.
Полученные четыре сигнала усилива ются тензоусилителями 2 и затем каждый поступает на два пороговых элемента: максимальный пороговый элемент 3 и минимальный пороговый элемент 4, которые установлены на максимальной и минимальной границе зоны регулирования. Если хотя бы один из полученных сигналов превышает уровень срабатывания максимального порогового элемента 3, то этот элемент генерирует управляющий сигнал, который переводит первую схему ИЛИ 5 во включенное состояние. Снимаемый с выхода первой схемы ИЛИ 5 единичный сигнал поступает на вход первой схемы И 7. При наличии и на втором входе первой схемы И 7 единичного сигнала, что свидетельствует о срабатывании хотя бы одного из минимальных пороговых элементов 4 и второй схемы ИЛИ 6, схема И 7 переводится в единичное состояние и передает в блок 8 управления машиной сигнал о блокировке.в связи с требованием регулировки в разные стороны, т.е. одновременно требуется увеличить усилие натяжения хотя бы на одной из колонн и уменьшить его при этом на другой, что невозможно выполнить перемещением механизма запирания.
Кроме того четыре сигнала от тен- зоусилителей 2 поступают в блоки 36 и 37 селектирования, которые на выходе дают сигналы, соответствующие
наименьшему II
ГАИН
и наибольшему U.
макс
из сигналов на входе. В первом блоке 38 суммирования определяется разность (ижакс- Пммн ), которая в третьем блоке 39 сравнения сравнивается с заданной величиной Д , соответствующей диапазону возможных значений нагрузки на несущих колоннах, задаваемой при помощи первого задатчика 40. Если ( Л (разности уровней срабатывания пороговых элементов), то отрегулировать нагрузки на колоннах невозможно, и с выхода третьего блока 39 сравнения на вход девятой схемы И 42 поступает единичный сигнал. При этом, если нет
регулировки в разные стороны,
то
с выхода первой схемы И 7 на вход пятой схемы НЕ 22 поступает нулевой сигнал, а с выхода пятой схемы НЕ 22 на второй вход девятой схемы И 42 - единичный сигнал. Девятая схема И 42 переводится в единичное состояние и передает в блок 8 управления машиной сигнал о блокировке в связи
с выше предельно допустимого рассогласование нагручок колонн.
В случае если ( т
нулевой
/ионе
0
- П.Н ±
сигнал с выхода третьего блока 39 сравнения поступает на вход шестой схемы НЕ 41, с выхода которой единичный сигнал поступает на третьи входы шестой и седьмой схем И 17 и 18.
Кроме того, сигналы с выходов первого и второго блоков 36 и 37 селектирования поступают соответственно на входы второго и третьего блоков 5 43 и 46 суммирования, на вторые входы которых соответственно с второго и третьего задатчиков 44 и 47 поступают сигналы, соответствующие макси
25
мально возможной IJU
20
пленке
и минимально возможной H1IMWM величинам нагрузок на колонны, С выходов второго и третьего блоков 43 и 46 суммирования снимаются сигналы соответственно равные WL
Д - Пмакс
- W
- и Аг
мин ммн° 11ри необходимости регулирования нагрузки колонн в сторону уменьшения единичный сигнал от шестой схемы И 17 переводит пятый блок 45 памяти в исходное рабочее
3d состояние, и сигнал, соответствующий &{, запоминается блоком 45 памяти и поступает на вход ограничения работы первого таймера 27. При необходимости регулирования нагрузки колонн в сторону увеличения (разрешение работы шестого блока 48 памяти единичным сигналом от седьмой схемы И 18) сигнал, соответствующий да , запоминается блоком 48 памяти и поступадО ет на вход ограничения работы второго таймера 28,
При нахождении механизма запирания в крайнем правом положении срабатывает датчик 9 положения, передающий единичный сигнал во вторую схему И 10, первую схему НЕ 11, а при нахождении механизма запирания в крайнем левом положении срабатывает ел датчик 12 положения, передающий единичный сигнал в третью схему И 13 и вторую схему НЕ 14. Выходные нулевые сигналы с первой и второй схем НЕ, соответствующие крайним положениям механизма запирания, поступают на вход четвертой и пятой схем И 15 и 16, запрещая регулировку механизма запирания в направлении крайнего положения.
45
Если усилие запирания превышает возможное максимальное значение,то единичный сигнал с первой схемы ИЛИ 5 поступает на вход шестой схемы И 17,на второй нход которой при отсутствии блокировки регулирование в разные стороны поступает также единичный сигнал с пятой схемы НЕ 22, а на третий вход при отсутствии блокировки выше предельно допустимого рассогласования нагрузок колонн единичный сигнал с шестой схемы НЕ 41. Шестая схема И 17 срабатывает, передавая единичный сигнал во вторую схему И 10 и четвертую схему И 15. Если при этом механизм запирания находится в крайнем правом положении, то с выхода второй схемы И 10 в блок R управления машиной поступает единичный сигнал блокировки по причине нахождения механизма запирания в крайнем правом положении (аналогично формируется сигнал блокировки по причине нахождения механизма запирания в левом крайнем положении), в противном случае срабатывает четвертая схема И .передавая единичный сигнал на регулировку положения механизма запирания. Одновременно сигнал о необходимости регулировки с шестой схемы И 17 через четвертую схему ИЛИ 35 поступает в блок 8 управления машиной. Блок 8 управления машиной при этом производит размыкание плит,возвращая механизм запирания в исходное положение. Единичный сигнал с четвертой схемы И 15 запоминается блоками 23 и ЗА памяти и с выхода блока 23 памяти поступает на первый блок 25 сравнения, а с выхода блока 34 памяти на второй блок 26 сравнения. При зтом на другие входы блоков 25 и 26 сравнения поступают нулевые сигналы соответственно с блоков 24 и 33 памяти. На выходе первого блока
25сравнения появляется единичный сигнал только при поступлении на его входы единичного сигнала от первого блока 23 памяти и нулевого от третьего блока 33 памяти (единичный сигнал на входе второго блока
26сравнения появляется только при поступлении на его входы единичного сигнала от второго блока 24 памяти и нулевого - от четвертого 34 памяти), с другого выхода первого блока 25 сравнения (аналогично для
второго блока 26 сравнения) на вход блока 8 управления машиной единичный сигнал поступает только при
наличии двух единичных входных сигналов. Единичный сигнал с выхода первого блока 25 сравнения включает первый таймер 27 при получении таймером от блока 8 управления машинон сигнала о нахождении механизма запирания в исходном положении.Таймер 27 приводит в действие исполнительный реверсивный двигатель 2ч, уменьшая на величину, соответствую5 щую Д( , усилие запирания. После отработки таймер 27 дает команду на стирание сигнала в первом блоке 23 памяти (при этом в четвертом блоке 34 памяти сохраняется единичный
0 сигнал, указывающий направлению данной регулировки в сторону уменьшения усилия запирания)„ В такой же последовательности срабатывают элементы второго канала, когда с датчиков 1
5 усилия снимается сигнал ниже уровня срабатывания порогового элемента 4, при этом исполнительный реверсивный двигатель 29 отрабатывает увеличение усилия запирания на определен0 ную Дг величину.
Если при повторном регулировании с блоков 33 или 34 памяти на входы соответственно блоков 25 или 26 сравнения приходят единичные сигналы
5 (что возможно, если при повторном регулировании требуется отработка реверсивного двигателя 29 в противоположную сторону), то с выходов блоков 25 или 26 сравнения на таймеры
0 27 или 28 будут поступать нулевые сигналы и регулирование усилия запирания производиться не будет. При этом с других выходов блоков 25 или 26 сравнения в блок 8 управления ма5 шиной поступает единичный сигнал, блокирующий ее работу вследствие регулировки в разные стороны.
В процессе регулирования единичный выходной сигнал с блоков 25 или 26 сравнения через третью схему ИЛИ 30 запускает третий таймер 31. Если время регулировки превысит максимально возможное, например, при выходе из строя какого-либо элемента, происходит блокировка цикла по. времени выходным сигналом третьего таймера 31, поступающим в блок 8 управления машиной.
91
Выходной сигнал с блоков 25 и 26 сравнения через третью схему ИЛИ 30 поступает также на счетчик 32, При превышении числа регулировок максимально заданного значения в блок 8 управления машиной от счетчика 32 подается сигнал о блокировке по превышению максимального количества регулировок.
Если нагрузки на каждой из колонн находятся в допуске, нулевые сигналы с первой и второй схем ИЛИ 5 и 6 инвертируются в схемах НЕ 19 и 20 и поступают на входы восьмой схемы И 21, с выхода которой единичный сигнал поступает в блок 8 управления машиной на разрешение очередного такта. Одновременно этот сигнал сбрасывает блоки 33 и ЗА памяти, счетчик 32 и третий таймер 31.
При поступлении единичных сигналов в соответствующие узлы 49-54 сигнализации они срабатывают,указывая причину блокировки.
Поступление единичного сигнала от восьмой схемы И 21 через десятую схему И 57 на командоаппарат 58 свидетельствует о разрешении выполнения следующего такта. При этом с целью обеспечения большей надежности на второй вход десятой схемы 57 через седьмую схему НЕ 56 поступает сигнал с выхода пятой схемы ИЛИ 55. При поступлении хотя бы одного единичного сигнала на вход пятой схемы ИЛИ 55 единичный сигнал с ее выхода инвертируется в седьмой схеме НЕ 56 и запирает десятую схему 57.
При поступлении единичного сигнала от четвертого блока ИЛИ 35 он запоминается в пятом блоке 59 памяти. С выхода блока 59 памяти единичный сигнал поступает на одиннадцатую схему И 60, на которую одновременно поступает единичный сигнал с датчика 63 положения плит (в данном случае плиты --не в исходном состоянии) Выходной единичный сигнал с одиннадцатой схемы И 60 через ключ 61 поступает на электромагнитный клапан 62. Клапан срабатывает, включая привод механизма запирания на разведение плит. При занятии плитами исходного положения на выходе датчика 63 положения плит появляется нулевой сигнал, схема И 60 запирается, обесточивая клапан 62,Одновременно нулевой сигнал с датчи™
33829Ю
ка 63 положения плит инвертируется в восьмой схеме НЕ 65 и поступает на двенадцатую схему И 64. На другой
г вход этой же схемы поступает единичный сигнал с пятого блока 59 памяти, Единичный выходной сигнал со схемы И 64 запускает таймеры 27 и 28 и сбрасывает блок 59 памяти,
Ю В случае блокировки (после устранения ее причин) сброс блоков осуществляется вручную от узла 66 сброса после блокировки (узел 66 представляет собой, например, электромехани15 ческую кнопку).
Таким образом, предлагаемое устройство по сравнению с известным позволяет быстро выявить необходимость блокировки при сильном рассогласова20 нии нагрузок колонн, осуществлять поворот исполнительного реверсивного двигателя (регулирование нагрузки) сразу на определенную величину, что позволяет экономить время на регули25 рование или на выявление необходимости блокировки, повышая в конечном итоге производительность процесса.
Испытания макета устройства регулирования нагрузки на несущих колон30 нах машины литья под давлением показало, что использование технического решения позволяет повысить производительность процесса. Использование предлагаемого устройства позволяет
jc увеличить производительность машины литья под давлением на 0,3%; увеличить стойкость пресс-формы на 0,3%.
Формула изобретения
40
Устройство для регулирования нагрузки на несущих колоннах машины литья под давлением по авт.ев, № 1405956, отличающееся
45 тем, что, с целью повышения производительности, оно дополнительно содержит два блока селектирования.три блока суммирования, три задатчика, пятый и шестой блоки памяти, третий
50 блок сравнения, шестую схему НЕ и девятую схему И, при этом входы первого и второго блоков селектирования соединены с тензоусилителями, а выходы через первый блок суммирования 55 с первым входом третьего блока сравнения, второй вход которого соединен с первым задатчиком, а выход соответственно через шестую схему НЕ - с шестой и седьмой схемами И, а через
девятую схему И - с блоком управления машиной, кроме того, входы вто рого блока суммирования соединены с первым блоком селектирования и вторым задатчиком, я выход - через пятый блок памяти, схема сброса-запус ка которого соединена с шестой схе54382912
мой И, с первым тлпмером, входы третьего Гнюка суммирования соединены с вторым блоком селектирования и третьим задатчиком, а выход - через тестой блок памяти, схема сброса- запуска которого соединена с седьмой схемой И, с вторым таймером.
1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования нагрузки на несущих колоннах машины литья под давлением | 1987 |
|
SU1405956A1 |
| Устройство для контроля за уровнем промывочной жидкости в скважине и выявления аварийных ситуаций | 1986 |
|
SU1328499A2 |
| Устройство для контроля усилия запирания пресс-формы в машине литья под давлением | 1986 |
|
SU1379085A1 |
| Устройство для контроля за уровнем промывочной жидкости в скважине и выявления аварийных ситуаций | 1985 |
|
SU1270308A1 |
| Устройство для контроля за уровнем промывочной жидкости в скважине и выявления аварийных ситуаций | 1987 |
|
SU1432204A2 |
| Устройство для управления с контролем | 1983 |
|
SU1156074A1 |
| Устройство для сопряжения микропроцессора с системной шиной | 1990 |
|
SU1837299A1 |
| Устройство для сбора данных о работе ЭВМ | 1982 |
|
SU1121679A1 |
| Устройство для контроля за уровнем промывочной жидкости в скважине и выявления аварийных ситуаций | 1987 |
|
SU1498914A2 |
| Устройство для обработки телединамограмм глубинно-насосных скважин | 1989 |
|
SU1638297A2 |
Изобретение относится к литейному производству, а именно к управлению машинами литья под давлением. Целью изобретения является повышение производительности. Цель достигается за счет уменьшения времени регулирования нагрузки путем определения максимального и минимального значений нагрузок на колонны и включения исполнительного реверсивного двигателя на время, пропорциональное отклонению этих значений от требуемых, а также путем оперативного выявления необходимости блокировки работы машины в зависимости от величины разности между максимальной и минимальной нагрузками. 2 ил.
L
«I
f
5s
S з
«5с
-L
f
0
X
о
Ј
о
Фиг.2
| Устройство для регулирования нагрузки на несущих колоннах машины литья под давлением | 1987 |
|
SU1405956A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
