Изобретение относится к транспортному машиностроению и может быть использовано в автомобилях и других транспортных средствах для автоматической компенсации крена.
Целью изобретения является повышение точности и скорости действия устройства.
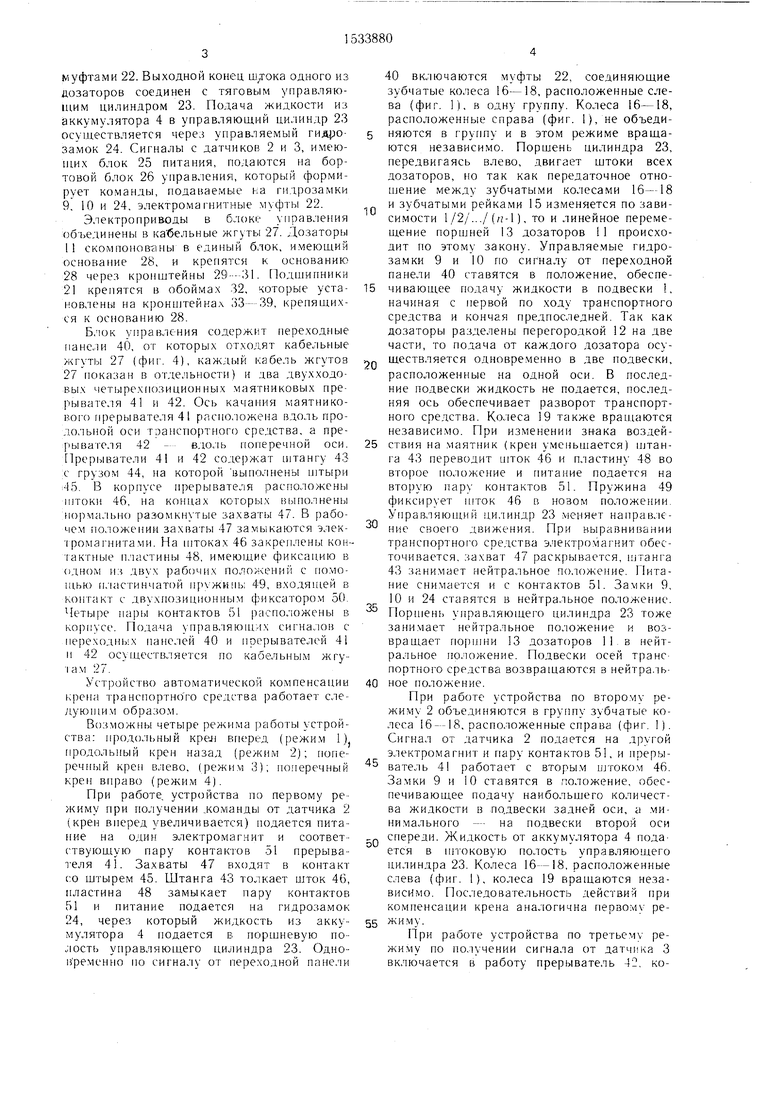
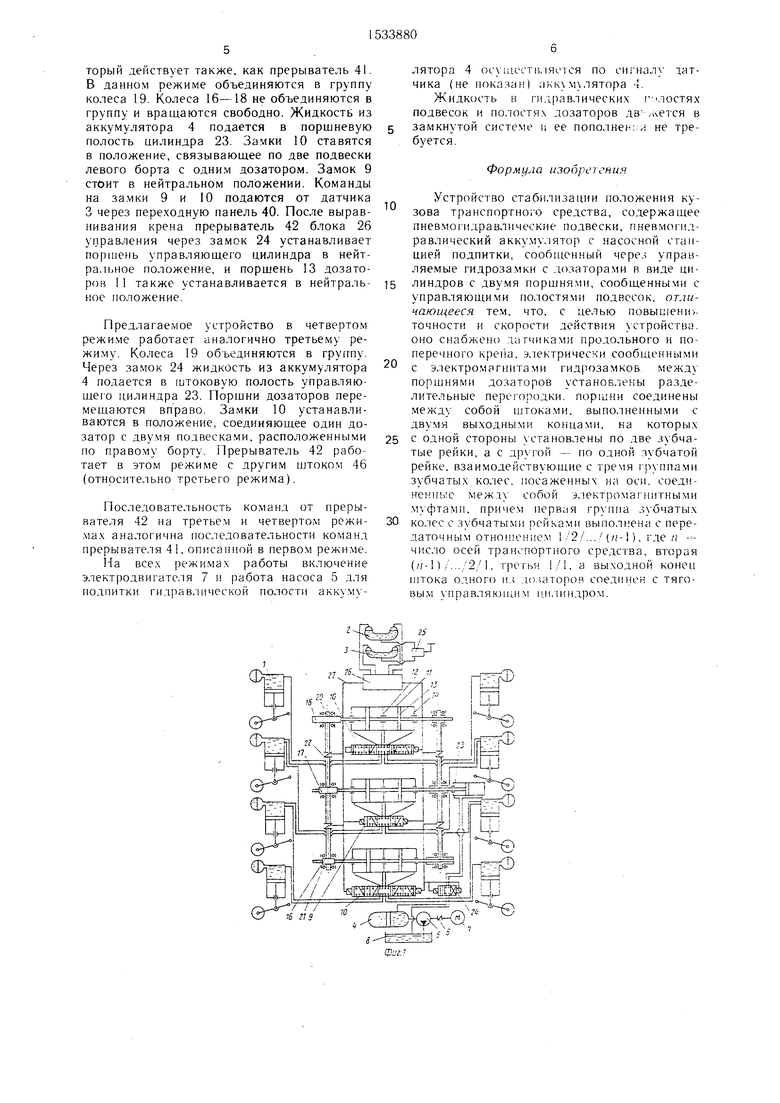
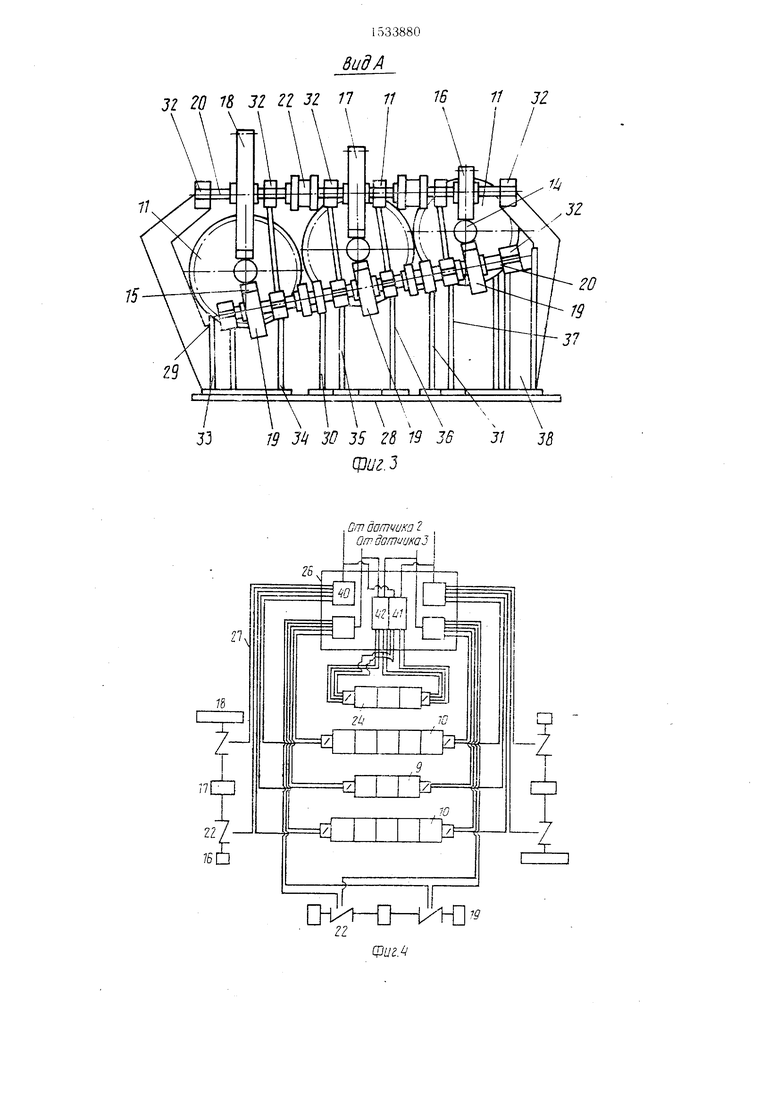
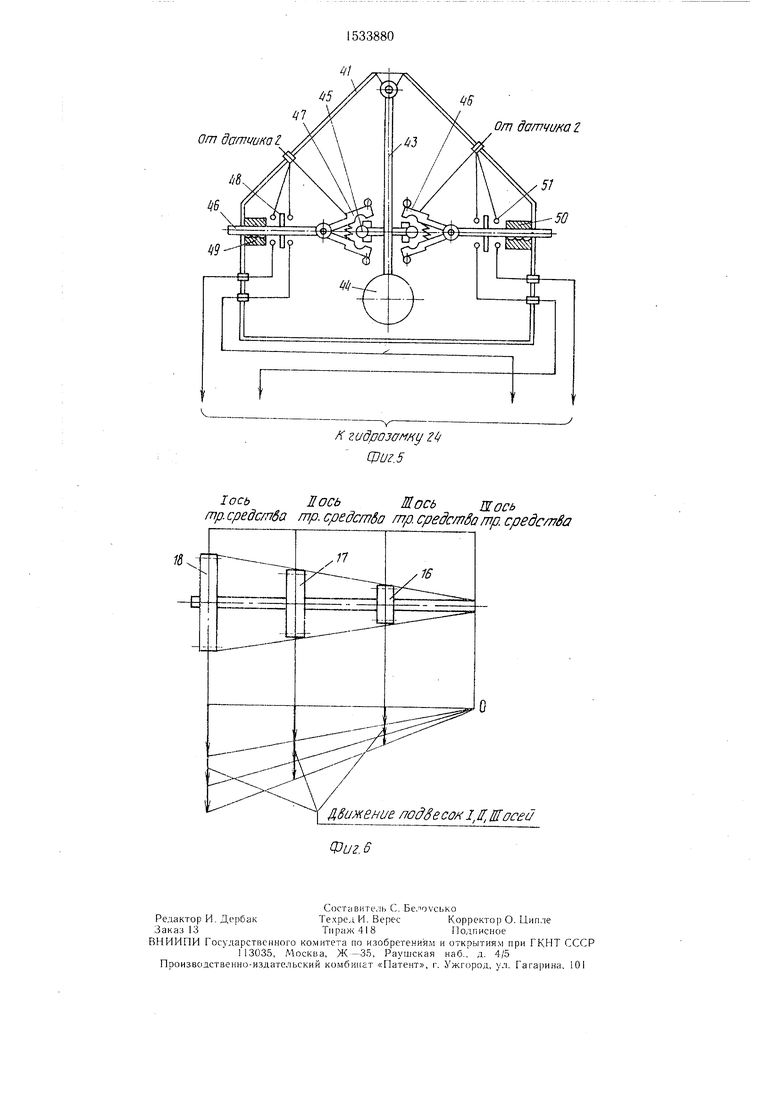
На фиг. 1 изображена принципиальная схема предлагаемого устройства; на фиг. 2 - блок дозаторов, вид спереди; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - структурная схема блока управления и трассировка кабельных жгутов; на фиг. 5 - двухходовой четырехпозицчонный маятниковый прерыватель блока управления; на фиг. 6 - диаграмма движения подвесок при компенсации продольного крена в зависимости от величины выдвижения штоков.
Устройство автоматической компенсации коена транспортного средства содержит пневмогидравлические подвески 1, датчики продольного 2 и поперечного 3 кренов и
пневмогидравлический аккумулятор 4, соединенный с насосом 5, который через муфту 6 соединен с электродвигателем 7. Подпитка аккумулятора 4 осуществляется из бака 8. Управляемые гидрозамки 9 и 10 служат для обеспечения поддчн жидкости из дозаторов 11 в подвески 1. Дозаторы 11 разделены перегородкой 12 на две части, в которых расположены поршни 13, соединенные Между собой штоками 14. На выходных концах штоков 14 установлены зубчатые рейки 15,вхсдяшие в зацепление с тремя группами зубчатых колес: две группы содержат колеса 16-18, а третья - колеса 19. Передаточное отношение зубчатых колес 16- 18 с зубчатыми рейками 15 выбрано равным 1/2/.../ (/г-1), исходя из анализа соотношений отрезков , прооднмых подвесками 1 осей транспортного средства (фиг. 6). Колеса посажены на осях 20, которые вращаются в подшипниках 21. Оси 20 соединены между собой электромагнитными
СЛ
со оэ оо оо
муфтами 22. Выходной конец ш/ока одного из дозаторов соединен с тяговым управляющим цилиндром 23. Подача жидкости из аккумулятора 4 в управляющий цилиндр 23 осуществляется через управляемый гидрозамок 24. Сигналы с датчикоЕ 2 и 3, имеющих блок 25 питания, подаются на бортовой блок 26 управления, который формирует команды, подаваемые ьа ппрозамки 9. 10 и 24, электромагнитные 22.
Электроприводы в блоке управления объединены в кабельные 27. Дозаторы 11 скомпонованы в единый блок, имеющий основание 28, и крепятся к основанию 28 через кронштейны 29--31. Подшипники 21 крепятся в обоймах 32, которые установлены на кронштейнах 33- 39, крепящихся к основанию 28.
Блок управления содержит переходные панели 40, от которых отходят кабельные жгуты 27 (фиг. 4), каждый кабель жгутов 27 показан в отдельности) и два двухходовых четырехпозиционных маятниковых прерывателя 41 и 42. Ось качания маятникового прерывателя 41 расположена вдоль продольной оси транспортного средства, а прерывателя 42 - вдоль поперечной оси. Прерыватели 41 и 42 содержат штангу 43 с грузом 44, на которой выполнены штыри -15. В корпусе прерывателя расположены штоки 46, на концах которых выполнены нормально разомкнутые захваты 47. В рабочем положении захваты 47 замыкаются электромагнитами. На штоках 46 закреплены контактные пластины 48, имеющие фиксацию в одном и- двух рабочих положений с помощью пластинчатой прхжимы 49, входящей в контакт с двухпозиционным фиксатором 50 Четыре пары контактов 51 расположены в корпусе. Подача управляющих сигналов с переходных панелей 40 и поерывателей 41 и 42 осуществляется по кабельным жгу- i а м 27.
Устройство автоматической компенсации крена транспортного средства работает следующим образом.
Возможны четыре режима работы устройства: продольный крел вперед (режим 1) продольный крен назад (режим 2); поперечный крен влево, (режим 3); поперечный крен вправо (режим 4).
При работе, устройства по первому режиму при получении .команды от датчика 2 (крен вперед увеличивается) подается питание на один электромагнит и соответствующую пару контактов 51 прерывателя 41. Захваты 47 входят в контакт со штырем 45. Штанга 43 толкает шток 46, пластина 48 замыкает пару контактов 51 и питание подается на гидрозамок 24, через который жидкость из аккумулятора 4 подается в поршневую полость управляющего цилиндра 23. Одновременно по сигналу от переходной панели
0
5
0
5
0
5
0
5
0
5
40 включаются муфты 22, соединяющие зубчатые колеса 16-18, расположенные слева (фиг. 1), в одну группу. Колеса 16-18, расположенные справа (фиг. 1), не объединяются в группу и в этом режиме вращаются независимо. Поршень цилиндра 23, передвигаясь влево, двигает штоки всех дозаторов, но так как передаточное отношение между зубчатыми колесами 16-18 и зубчатыми рейками 15 изменяется по зависимости 1/2/.../ (п-), то и линейное перемещение поршней 13 дозаторов 11 происходит по этому закону. Управляемые гидрозамки 9 и 10 по сигналу от переходной панели 40 ставятся в положение, обеспечивающее подачу жидкости в подвески , начиная с первой по ходу транспортного средства и кончая предпоследней. Так как дозаторы разделены перегородкой 12 на две части, то подача от каждого дозатора осуществляется одновременно в две подвески, расположенные на одной оси. В последние подвески жидкость не подается, последняя ось обеспечивает разворот транспортного средства. Колеса 19 также вращаются независимо. При изменении знака воздействия на маятник (крен уменьшается) штанга 43 переводит шток 46 и пластину 48 во второе положение и питание подается на вторую пару контактов 51. Пружина 49 фиксирует шток 46 в новом положении Управляющий цилиндр 23 меняет направление своего движения. При выравнивании транспортного средства электромагнит обесточивается, захват 47 раскрывается, штанга 43 занимает нейтральное положение. Питание снимается и с контактов 51. Замки 9, 10 и 24 ставятся в нейтральное положение. Поршень управляющего цилиндра 23 тоже занимает нейтральное положение и возвращает поршни 13 дозаторов 1 1 в нейтральное положение. Подвески осей транс портного средства возвращаются з нейтральное положение.
При работе устройства по второму ре- жим 2 объединяются в группу зубчатые колеса I6--18, расположенные справа (фиг. 1). Сигнал от датчика 2 подается на другой электромагнит и пару контактов 51, и прерыватель 41 работает с вторым штоком 46. Замки 9 и 10 ставятся в положение, обеспечивающее подачу наибольшего количества жидкости в подвески задней оси, а минимального - на подвески второй оси спереди. Жидкость от аккумулятора 4 подается в штоковую полость управляющего цилиндра 23. Колеса 16--18, расположенные слева (фиг. 1), колеса 19 вращаются независимо. Последовательность действий при компенсации крена аналогична первому режиму.
При работе устройства по третьему режиму по получении сигнала от датчика 3 включается в работу прерыватель 42, который действует также как прерыватель 41 В данном режиме объединяются в группу котеса 19 Колеса 16-18 не объединяются в группу и вращаются свободно Жидкость из аккумулятора 4 подается в поршневую полость цилиндра 23 Замки 10 ставятся в попожение связывающее по две подвески левого борта с одним дозатором Замок 9 стоит в нейтральном положении Команды на замки 9 и 10 подаются от датчика 3 через переходную панель 40 Посте вырав низания крена прерыватель 42 бчока 26 правления через замок 24 устанавливает поршень у правтяющет цилиндра в нейт ра 1ьное потожение и поршень 13 дозато ров 11 также устанавливается в нейтрать кое попожение
Предлагаемое устройство в четвертом режиме работает аначогччно третьему ре жиму Ко icta 19 обьединяются в групт Через замок 24 жидкость из аккумулятора 4 подается в щтоковую полость управляю щего цилиндра 23 Поршни дозаторов пере метаются вправо Замки 10 устанавли ваются в положение соединяющее один до затор с двумя подвесками распопоженными по правом борту Прерыватель 42 рабо тает в этом режиме с другим штоком 46 (относите 1ьно третьего режима)
Посте ювате 1ьность команд от преры ватетя 42 на третьем и четверто режи чах аналогична пос 1едовательности команд прерывате IH 41 описанной в первом режиме
liia всех режимах работы включение электродвшатстя 7 и работа насоса 5 для пожитки ги фав шчсч кои полости аккчму
5
0
5
0
лятора 4 ( т в 1Я кя по с и на п дат чика (не показан) )пкум тятора 4
Жидкость в ги ф IB шческих тостях подвесок и поюстях юзаторов IB в замкнутой системе ь ее попо iHet J не тре буется
Форчцга inooit тения
Устройство стабилизации положения ку зова TpancnoprHOiO срелства солержащее пневмог и фавтич1(.кис подвески пневмсми равлический аккуму ятор с масочной стан цией подпитки сообщенный чере у прав ляемые 1идрозамки с юзаторами в виде ци пиндров с ДВУМЯ поршнями сообщенными с управляющими полостями ПОЛ,РССОК опи чающееся тем что с целью повьнлешь точности и скорости действия у гройсгьа оно снабжено 1агчикамн протольного и по перечною Kpei a злеклриче -и сообщенными с электромагнитами гид(.озамков между поошнями юзаторов установ .ечы разае титетьные персюродки порцани соединены собой штоками выпотненными с двумь выходными KOfiuaMn на которых с одной стороны у станов ены по две убча тые рейки а с дрмой по одной з бчатои рейке пзаимо 1ейству ющие с тремя ппппами зубчатых колес юсаженных на оси соедч меж 1У собой з ектьома1 ншньыи причем группа лочатых коле i. ЗУ бчатьп и пеичами вы по л не ia с пере чаточным отнопч ние 1 2/ (п i i ie n чис ю осей транспортного средства вторая (п 1) 2 1 i |н i ьч 1 а выходной коноц штока очюю HI ю атопоч сое тит. к с тяго вым управляющим i п н нл.ром
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА ПОДВЕСКИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2408475C2 |
| Подвеска транспортного средства | 1977 |
|
SU742177A1 |
| МАШИНА | 2009 |
|
RU2401762C1 |
| СВОБОДНОПОРШНЕВОЙ ДВИГАТЕЛЬ | 2012 |
|
RU2500906C1 |
| ГИДРОПНЕВМАТИЧЕСКАЯ ПОДВЕСКА КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2560216C1 |
| Система рулевого управления колесного транспортного средства | 1985 |
|
SU1273286A1 |
| Привод движителя транспортного средства | 1984 |
|
SU1220949A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1976 |
|
SU1038051A1 |
| КОМБИНИРОВАННАЯ ПОДВЕСКА АВТОМОБИЛЯ | 1998 |
|
RU2149106C1 |
| Активная подвеска корпуса транспортного средства | 1973 |
|
SU598780A1 |
Изобретение относится к транспортному машиностроению и может быть использовано в автомобилях и других транспортных средствах для автоматической компенсации крена. Цель изобретения - повышение точности и скорости действия устройства. Устройство содержит пневмогидравлические подвески, датчик продольного крена, датчик поперечного крена, пневмогидравлический аккумулятор. Аккумулятор соединен с насосом, который через муфту соединен с электродвигателем. Аккумулятор подпитывается из бака. Управляемые гидрозамки служат для обеспечения подачи жидкости из дозаторов в подвески. Дозаторы разделены перегородкой на две части, в которых расположены поршни, соединенные между собой штоки. На выходных концах штоков установлены зубчатые рейки, входящие в зацепление с тремя группами зубчатых колес. Передаточное отношение зубчатых колес двух первых групп с зубчатыми рейками выбрано равным 1/2/.../(N-1) исходя из анализа соотношений отрезков путей, проходимых подвесками осей транспортного средства. 6 ил.
Фг-Тп
.
18
32 20 is 3i 22 зг п «
I
J3
W M 30 35 28 19 36 31
фигЗ
. D.T датчика 2 Qrr Затмит 3
CH -Ch-t H
П
Фиг 4
16
11 зг
зг
38
ill
am датчика.
It8
/Г идрозамну 2/1
ЦЗиг 5
1осьНосьШось тось
тр. средства тр. средстба тр средства тр. cpedc/nSa
Движение лод8е сок 1/, Фиг 6
ЧВ
От датчика 2
51
50
| УСТРОЙСТВО для УПРАВЛЕНИЯ ПОДВЕСКОЙ ТРАНСПОРТНОГО СРЕДСТВА | 0 |
|
SU202742A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
