:«р х
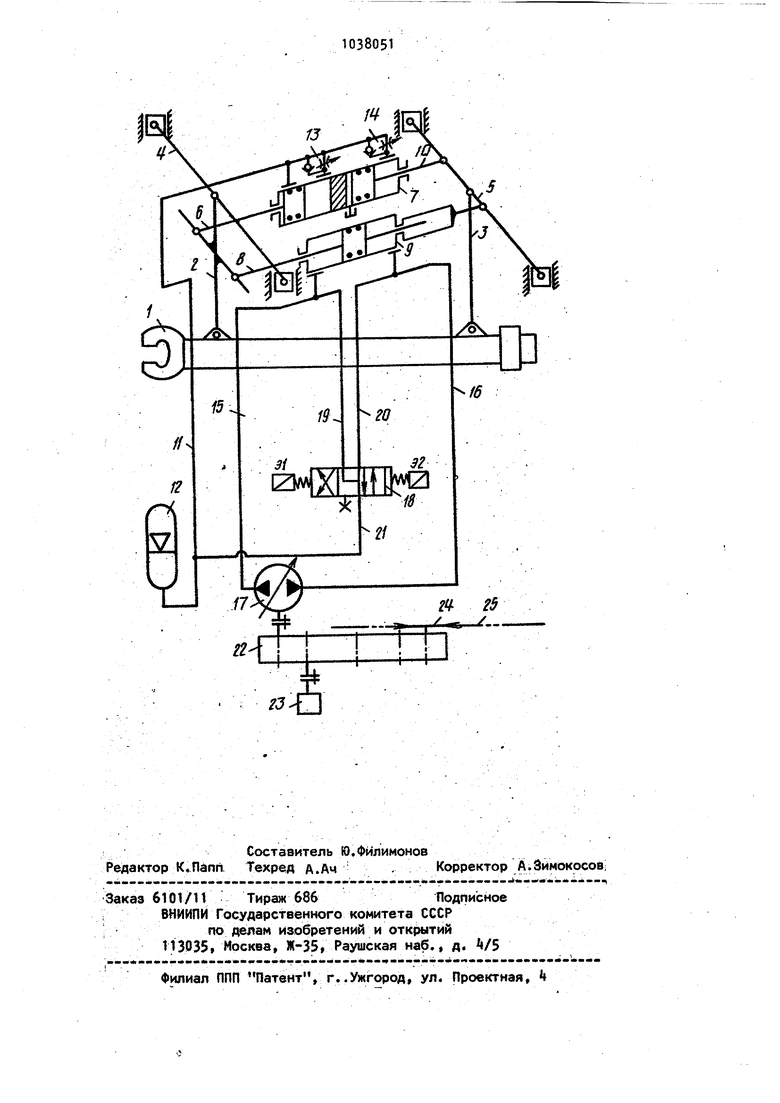
:л Изобретение относится к вспомогательному оборудованию кузнечно-прессовых цехов машиностроительных предприятий, а именно к конструкциям ковочных манипуляторов. Известно устройство осевого перемещения хобота ковочного манипулятора, содержащее расположенные межд 1 верхней осью задней подвески и .тягой передней .подвески силовые гидравлические цилиндры останова и возврата хобота, гидропневмати ческий аккумулятор, связаннь1й с полостями цилиндра возврата посредством магистралей с установУ ленными- на них средствами регулирова ния CIOT ока рабочей среды, механизм перемещения тележки хобота в виде электродвигателя, редуктора и зубчатого зацепления , а также насос, ки-, нематическн связанный с редуктором механизма перемещения тележки хобота 1. Недортатком известного устройства осевого перемещения хобота Ковочного манипулятора является то, что в связи со значительной MHepUHOH ностью массы подвески хобота и малым объемом магистралей.,связывающих гидр насос с полостями цилиндра, для пре;дохранения от перегрузки в обе магист;рали встроены управляемые предохрани тельные клапаны, что уменьшает однозначность соответствия перемещения тележки и отклонения хобота, а стало бытк и точность останова. Наличие iдополнительных обводных1 каналов меж ду полостями цилиндра также снижает точность останова и надежность работы устройства. Цель изобретения - повышение точности и надежности работы устройства осевого перемещения хобота ковочного манипулятора. Указанная цель достигается тем, что в устройстве осевого перемещения хобота ковочного манипулятора, содержащем расположенные между верхней осью задней подвески и тягой передне подвески силовые гидравлические цилиндры останова и возврата хобота, гидропневматический аккумулятор,связанный С полостями цилиндра возврата посредством магистралей с установленными на них средствами регулирования потока рабоче й среды, механизм перемещения тележки хобота в виде электродвигателя, редуктора и зубча того зацепления, а также насос кинематичёски связанный с редуктором механизма перемещения тележки хобота, полости силового цилиндра останова связаны гидравлическими магистра лями с выходами насоса, а также с гидропневматическим аккумулятором через управляемый трехпозиционный гидрораспределитель с от рытым центром;На чертеже изображена гидрокине-матическая схема устройства осевого перемещения хобота ковочного манипулятора. -Хобот 1 манипулятора шарниряо закреплен с помощью вертикальных опорHtp|X тяг 2 и 3 -относительно пер.едней Ц и задней 5 верхних осей шарнирного параллеллограмма хобота. С тягой 2 передней опоры хобота шарнирно ;связаны передний шток сдвоенного гидроцилиндра 7 возврата хобота и передний шток 8 г.идроцилиндра 9 останова хобота. С задней верхней осью 5 подвески шарнирно соединены задний шток 10 . Цилиндра возврата и корпус, цилиндра 10 останова. Магистралью 11 , гидропневматический аккумулятор 12 сообсцен непосредственно с передней штоковой полостью гидроцилиндра 7, а дополнительно через дроссели с обратными клапанами 13 и 14 с передней поршневой и задней штоковой полостями данного цилиндра. Задняя поршневая полость сообщена со сливом.-. I . : Передняя и задняя полости гидроцилиндра 9 магистралями 15 и 16 непосредственно связаны с выходами ротационного дозатора расхода-насоса 17 а через трехпозиционный электроуправляемый гидрораспределитель открытым центром и заглушенным сливом И гидромагистрали 19-21 - с гидропневматическим аккумулятором 12. Дозатор расхода - насос 17. - кинематически связан с неподвижно закрепленным на дележке манипулятора редуктором 22, С соответствующими ступенями редуктора также кинематиг, чёски связаны электродвигатель 23 привода тележки и звездочка 2, взаимодействующая с цевочной рейкой 25 закрепленной неподвижно относительно рельсового пути. Устройство работает следующим об разом. При транспортном перемещении те лежки манипулятора, а также при ковке в режимах ручного управления и шлихтовки электромагниты Э1 и 32 обесточены, в .нейтральном положении гидрораспределителя 18 of5e полости гидроцилиндра -9 останова и. выходы, до затора расхода - насоса 1/,сообщены COOT в ет ст вующими г идрома гист раля ми с гидропневматическим аккумулятором 12, являющимся основным источником давления в гидросистеме манипулятора используемым также для привода други исполнительных механизмов. ИспЬльзуемый в качестве дозатора расхода насос17, работая на минимальном перепаде давления, определяемом потеря ми в магистралях 15 1б, 19, 20, 21, отбирает от элекродвигателя 23 тележ ки незначительную мощность, соизмери мую с мощностью холостого хода. При непрерывном перемещении тележ ки в момент зажатия поковки -бойками пресса {принудительный останов Хобота) происходит перетекание рабочей жидкости между полостями гидроцилиндра 9 останова через магистрали 13 и 20 и гидрораспределитель 18, а из соответствующей полости (в зави симрсти от направления движения) цилиндра 7 возврата рабочая жидкость . вытесняется через дроссель с обратным клапаном 13 или Ни магистраль 11 в гидропневматический аккумулятор 12. После освобождения поковки бойка ми цилиндр возврата с помощью аккумулятора 12 .возвращает хобот 1с поковкой в среднее положение (догон хоботом тележки) с регулируемой соответствующим дросселем скоростью. В режиме ковки с осевыми шаговыми подачами с некоторым упреждением по пути отбрабртки тележкой заданного шага подачи в зависимости от направления ковки ,к прессу,от прес-. са) осуществляется включение соответствующего электромагнита 31 или . Э2 гидрораспределителя tS и одновреу. менное отключение электродвигателя :23 привода тележки.При этом гидрорас:пределитель занимает такое роложение, Лри котором полость цилиндра 9 останова, обращенная в сторону перемещения тележки, остается сообщенной с аккумулятором 12, а противоположная полость отсекается от аккумулятора и остается сообщенной лишь с соответствующим выходом дозатора расхода - насоса 1. Приводимый за .счет накопленной кинетической . энергии тележки дозатор расхода - насос 17 в данный момент откачивает рабочую жидкость из соответствующей полости цилиндра 9 останова в напорную магистраль аккуяулятора- 12.. Регулировкой рабочего объема дозатора расхода-насоса 17 при этом обеспечивается соотГветствие по величине и противоположная направ.лённость скоростей отклонения хобота и перемещения тележки, благодаря чему в абсолютном движении поковка останавливается. Отключение электромагнитаЭ1 или . Э2 происходит одновременно с коман- . дой на реверс, верхнего бойка пресса и н ачалом раагона тележки (включение электродвигателя 23), .что вызывает возврат гидрораспределителя 18 .в нейтральное положение, при этом догон хоботом.тележки, т.е. его возврат в среднее положение осуществляется аналогично описанному ранее для режимов ручного управления и лихтовки. По сравнению с базовым объектом,. в качестве которого принят прототип, использование предлагаемого изобретения позволит повысить точность и надежность работы устройства осевого перемещения хобота ковочного манипулятора. .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство осевого перемещения хобота ковочного манипулятора | 1982 |
|
SU1053949A1 |
| Привод продольного перемещения хобота ковочного манипулятора | 1981 |
|
SU997945A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1984 |
|
SU1220839A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1971 |
|
SU682317A1 |
| Привод вертикального перемещения хобота ковочного манипулятора | 1980 |
|
SU912390A1 |
| Передняя подвеска хобота ковочногоМАНипуляТОРА | 1979 |
|
SU816656A1 |
| Подвесной ковочный манипулятор | 1979 |
|
SU977095A1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2010661C1 |
| Хобот ковочного манипулятора | 1977 |
|
SU725773A1 |
| Привод продольного перемещения тележки и хобота ковочного манипулятора | 1980 |
|
SU946775A1 |
УСТРОЙСТВО ОСЕВОГО ПЕРЕМЕЩЕНИЯ ХОБОТА КОВОЧНОГО МАНИПУЛЯТОРА содержащее расположенные между верхней осью задней подвески,и тягой передней подвески силовые гидравлические цилиндры останова и возврата хобота, гмдропневматический аккумулятор,- связанный с полостями Цилиндра возврата посредством магистралей с установленными на них средствами регулирования потока рабочей среды., механизм перемещения тележки хобота в виде электродвигателя, редуктора и зубчатого зацепления, а также насос, кинематически связанМ|1й с редуктором механизма перемещения Tieлежки хобота, отличающееся тем, что, с целью повьшения точности и надежности, полости силового цилиндра останова связаны гидравлическими магистралями с выходами насбса,а также с гидропневматическим аккумулятором через управляемый трехпозиционный гидрораспределитель с открытым центром.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| . | |||
