Изобретение относится к учебно-лабораторному оборудованию и может быть использовано для исследования электроприводов робототехнчческих систем, обеспечивающих изменение динамического момента нагрузки.
Цель изобретения - сокращение трудоемкости исследований.
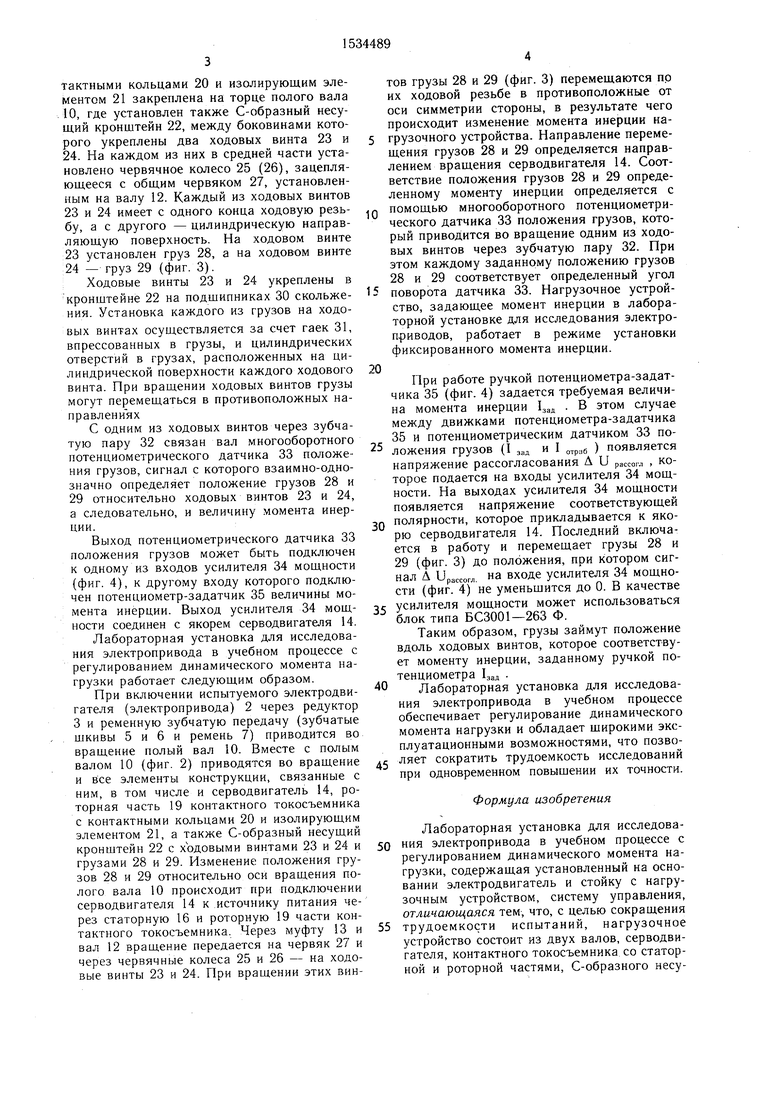
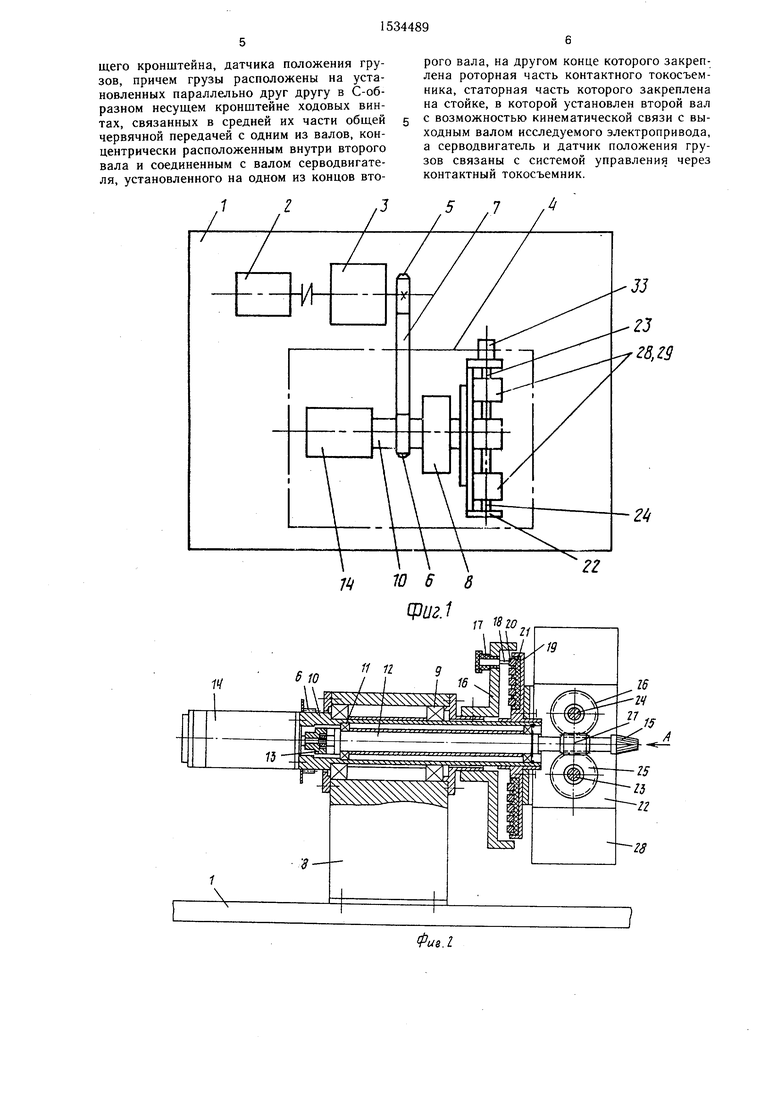
На фиг. 1 изображена лабораторная установка, вид сверху; на фиг. 2 - нагрузочное устройство, разрез; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - блок-схема лабораторной установки.
Лабораторная установка для исследования электропривода в учебном процессе с регулированием динамического момента нагрузки содержит основание 1 (фиг. 1), на котором укреплены исследуемый электродвигатель (электропривод) 1 и связанные с ним редуктор 3 и нагрузочное устройство 4, причем последнее связано с электродвигателем k посредством ременной зубчатой передачи, состоящей из двух зубчатых шкивов 5 и 6 и зубчатого ремня 7. Нагрузочное устройство 4 расположено на несущей стойке 8, в которой на подшипниках 9 (фиг. 2) смонтирован полый вал 10 с зубчатым шкивом 6 на его наружной поверхности и установленным внутри него на подшипниках 11 валом 12, один конец которого через муфту 13 связан с валом серводвигателя 14, а другой конец заканчивается ручкой 15. На несущей стойке 8 закреплена статорная часть 16 контактного токосъемника со щеткодержателями 17 и контактными щетками 18. Роторная часть 19 контактного токосъемника с
С1
го и 00
со
тактными кольцами 20 и изолирующим элементом 21 закреплена на торце полого вала 10, где установлен также С-образный несущий кронштейн 22, между боковинами кото рого укреплены два ходовых винта 23 и 24 На каждом из них в средней части установлено червячное колесо 25 (26), зацепляющееся с общим червяком 27, установлен ||ым на валу 12 Каждый из ходовых винтов 23 и 24 имеет с одного конца ходовую резьбу, а с другого - цилиндрическую направляющую поверхность На ходовом винте
23установлен груз 28, а на ходовом винте
24- груз 29 (фи 3)
Ходовые винты 23 и 24 укреплены в кронштейне 22 на подшипниках 30 скольжения Установка каждого из грузов на ходовых винтах осуществляется за счет гаек 31, впрессованных в грузы, и цилиндрических отверстий в грузах, расположенных на цилиндрической поверхности каждого ходово о винта При вращении ходовых винтов грузы могут перемещаться в противоположных направлениях
С одним из ходовых винтов через зубча- napv 32 связан вал многооборотного потенпиометрического датчика 33 положе ния грузов, сигнал с которого взаимно-однозначно определяет положение грузов 28 и 29 относительно ходовых винтов 23 и 24, а следовательно, и величину момента инерции
Выход потенциометрического датчика 33 положения грузов может быть подключен к одному из входов усилителя 34 мощности (фиг 4), к другому входу которого подключен потенциометр-задатчик 35 величины мо мента инерции Выход усилителя 34 мощности соединен с якорем серводвигателя 14
Лабораторная установка для исследова ния электропривода в учебном процессе с регулированием динамического момента нагрузки работает следующим образом
При включении испытуемого электродви гателя (электропривода) 2 через редуктор 3 и ременную зубчатую передачу (зубчатые шкивы 5 и 6 и ремень 7) приводится во вращение полый вал 10 Вместе с полым валом 10 (фиг 2) приводятся во вращение и все элементы конструкции, связанные с ним, в том числе и серводвигатель 14, ро торная часть 19 контактного токосъемника с контактными кольцами 20 и изолирующим элементом 21. а также С образный несущий кронштейн 22 с ходовыми винтами 23 и 24 и грузами 28 и 29 Изменение положения гру- U)B 28 и 29 относительно оси вращения по- чого вала 10 происходит при подключении серводвигателя 14 к источнику питания че рез статорную 16 и роторную 19 части кон TdKTHoio токосъемника Через муфту 13 и вал 12 вращение передается на червяк 27 и через червячные колеса 25 и 26 - на ходо вые винты 23 и 24 При вращении этих вин
тов грузы 28 и 29 (фиг 3) перемещаются по их ходовой резьбе в противоположные от оси симметрии стороны, в результате чего происходит изменение момента инерции нагрузочного устройства Направление перемещения грузов 28 и 29 определяется направлением вращения серводвигателя 14 Соответствие положения грузов 28 и 29 определенному моменту инерции определяется с
помощью многооборотного потенциометрического датчика 33 положения грузов, который приводится во вращение одним из ходовых винтов через зубчатую пару 32 При этом каждому заданному положению грузов
28и 29 соответствует определенный угол поворота датчика 33 Нагрузочное устройство, задающее момент инерции в лабораторной установке для исследования электроприводов, работает в режиме установки фиксированного момента инерции
При работе ручкой потенциометра-задат- чика 35 (фиг 4) задается требуемая величина момента инерции 11ад В этом случае между движками потенциометра-задатчика 35 и потенциометрическим датчиком 33 по5 ложения грузов (I ,п и 1 1Tpd6 ) появляется напряжение рассогласования Л U рассо,, , которое подается на входы усилителя 34 мощности На выходах усилителя 34 мощности появляется напряжение соответствующей
Q полярности, которое прикладывается к якорю серводвигателя 14 Последний включается в работу и перемещает грузы 28 и
29(фиг 3) до положения, при котором сигнал UpdlLOIJ1 на входе усилителя 34 мощности (фиг 4) не уменьшится до О В качестве
5 усилителя мощности может использоваться блок типа БСЗОО1-263 Ф
Таким образом, грузы займут положение вдоль ходовых винтов, которое соответствует моменту инерции, заданному ручкой потенциометра 11ад
0 Лабораторная установка для исследования электропривода в учебном процессе обеспечивает регулирование динамического момента нагрузки и обладает широкими эксплуатационными возможностями, что позвос ляет сократить трудоемкость исследований при одновременном повышении их точности
Формула изобретения
Лабораторная установка для исследова- 0 ния электропривода в учебном процессе с регулированием динамического момента нагрузки, содержащая установленный на осно вании электродвигатель и стойку с нагрузочным устройством, систему управления, отличающаяся тем, что, с целью сокращения 5 трудоемкости испытаний, нагрузочное устройство состоит из двух валов, серводви гателя, контактного токосъемника со статор ной и роторной частями, С-образного нес
щего кронштейна, датчика положения грузов причем грузы расположены на установленных параллельно друг другу в С-об- разном несущем кронштейне ходовых винтах связанных в средней их части общей червячной передачей с одним из валов, концентрически расположенным внутри второго вала и соединенным с валом серводвигателя, установленного на одном из концов второго вала, на другом конце которого закреплена роторная часть контактного токосъемника, статорная часть которого закреплена на стойке, в которой установлен второй вал с возможностью кинематической связи с выходным валом исследуемого электропривода, а серводвигатель и датчик положения грузов связаны с системой управления через контактный токосъемник.
| название | год | авторы | номер документа |
|---|---|---|---|
| Эксцентриковый кривошипно-шатунный механизм с регулируемым ходом ползуна | 1987 |
|
SU1645607A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ МОТОРНО-ТРАНСМИССИОННОЙ УСТАНОВКИ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2102715C1 |
| Электромеханический привод поступательного действия | 2022 |
|
RU2786248C1 |
| Лабораторная установка для исследования шагового электродвигателя в учебном процессе | 1984 |
|
SU1193720A1 |
| Лабораторная установка для исследования шарнирно-рычажного преимущественно кривошипно-ползунного механизма | 1985 |
|
SU1341670A1 |
| Устройство для определения массы тела в невесомости | 1982 |
|
SU1073580A1 |
| СИСТЕМА УПРАВЛЕНИЯ БИОЭЛЕКТРИЧЕСКИМ ПРОТЕЗОМ | 2016 |
|
RU2653820C2 |
| Способ определения коэффициента трения смазочных материалов | 2022 |
|
RU2800944C1 |
| Стенд для испытания клиноременных передач | 1989 |
|
SU1645869A1 |
| СТЕНД ДЛЯ ОПРЕДЕЛЕНИЯ УСИЛИЙ РЕЗАНИЯ ГРУНТА | 1999 |
|
RU2158422C1 |
Изобретение относится к учебно-лабораторному оборудованию, в частности к установкам для исследования электроприводов робототехнических систем, обеспечивающих изменение динамического момента нагрузки. Цель изобретения - сокращение трудоемкости испытаний. Нагрузочное устройство снабжено серводвигателем, двумя грузами, каждый из которых установлен с возможностью перемещения вдоль соответствующего ходового винта, которые закреплены в C -образном несущем кронштейне и связаны с первым валом, концентрически расположенным во втором валу. Один конец первого вала связан с валом серводвигателя, закрепленного на конце второго вала, который кинематически связан с валом исследуемого электродвигателя. При вращении второго вала от исследуемого электродвигателя приводятся во вращение серводвигатель и C-образный несущий кронштейн с ходовыми винтами и грузами. Изменение положения грузов происходит при подключении серводвигателя к источнику питания. При этом грузы перемещаются по ходовым винтам в противоположные от оси симметрии стороны. В результате происходит изменение момента инерции нагрузочного устройства, что фиксируется датчиком положения грузов. 4 ил.
1
4
%
&
т т
35
Фиг 5
Зотраб
ли,
рас
34
| Лабораторная установка для исследования шагового электродвигателя в учебном процессе | 1984 |
|
SU1193720A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
