Изобретение относится к медицинской технике, а именно к протезированию и протезостроению.
Известна «Система управления биоэлектрическими протезами верхних конечностей» по патенту РФ №278023 А1, МПК A61F 2/72, содержащая искусственную кисть, усилитель биопотенциалов, усилитель мощности, датчик давления, размещенный в одном из пальцев искусственной кисти, вибратор и блок ограничения времени подачи информации, выполненный в виде электронного реле времени.
Недостатком данного устройства является то, что оно не позволяет информировать инвалида-оператора о позиционном положении пальцев кисти.
Этот недостаток частично устранен в «Системе управления биоэлектрическими протезами» по патенту РФ №243142 А1, МПК A61F 2/72, содержащей искусственную кисть, блок управления перемещениями пальцев искусственной кисти, датчик давления, преобразователь силы сжатия и первый вибратор, датчик угловых перемещений (например, в виде потенциометра), укрепленный на оси шарнира первого пальца, преобразователь положения пальцев и второй вибратор, а также блок ограничения времени подачи информации.
Недостатком данного устройства является то, что информация о положении или начале перемещения пальцев передается точечно в форме вибрационных сигналов одним вибродатчиком и не может дать инвалиду-оператору представления о взаимном позиционном расположении пальцев кисти относительно друг друга, в том числе, например, при действии за препятствием.
Эта система является наиболее близкой по функциональной и технической сущности и выбрана авторами в качестве прототипа.
Задачей предлагаемого изобретения является повышение удобства инвалида-оператора при выполнении целенаправленных действий по самообслуживанию путем повышения естественности управления и точности управляющих действий благодаря введению устройства позиционного очувствления подвижности пальцев искусственной кисти и системы управления его подвижными активаторами.
Технический результат поставленной задачи достигается тем, что в систему управления биоэлектрическим протезом, содержащую искусственную электромеханическую кисть, электроды, блок управления перемещениями пальцев искусственной кисти, датчик давления, преобразователь силы сжатия, вибратор и блок временного ограниченичения работы вибратора, а также датчик угловых перемещений (например, в виде потенциометра), укрепленный на оси шарнира первого пальца, предлагается ввести устройство позиционного очувствления подвижности пальцев искусственной кисти и систему управления его подвижными активаторами. При этом устройство позиционного очувствления предлагается выполнить в виде модуля, содержащего основание с продольными пазами, в которые вставлены с возможностью продольного перемещения контактные элементы двух активаторов, кинематически посредством ходовых гаек соединенных с шарнирно закрепленным на основании ходовым винтом, один конец которого имеет правую, а второй левую резьбу, причем контактные элементы активаторов выполнить подпружиненными, а ходовой винт кинематически, например, посредством зубчатой передачи соединить с микроэлектроприводом, неподвижно закрепленным на основании, при этом один из активаторов соединить с подвижным звеном закрепленного на основании датчика перемещения активаторов, например, выполненного в виде потенциометра поступательного типа. Причем в канале управления микроэлектроприводом активаторов предлагается датчик угловых перемещений первого пальца и датчик перемещения активаторов, представляющий собой датчик обратной связи, соединить со входом сумматора, на выходе которого подключить первый и второй импульсные преобразователи, соединенные с усилителем мощности, выход которого подключить к электроприводу перемещения активаторов.
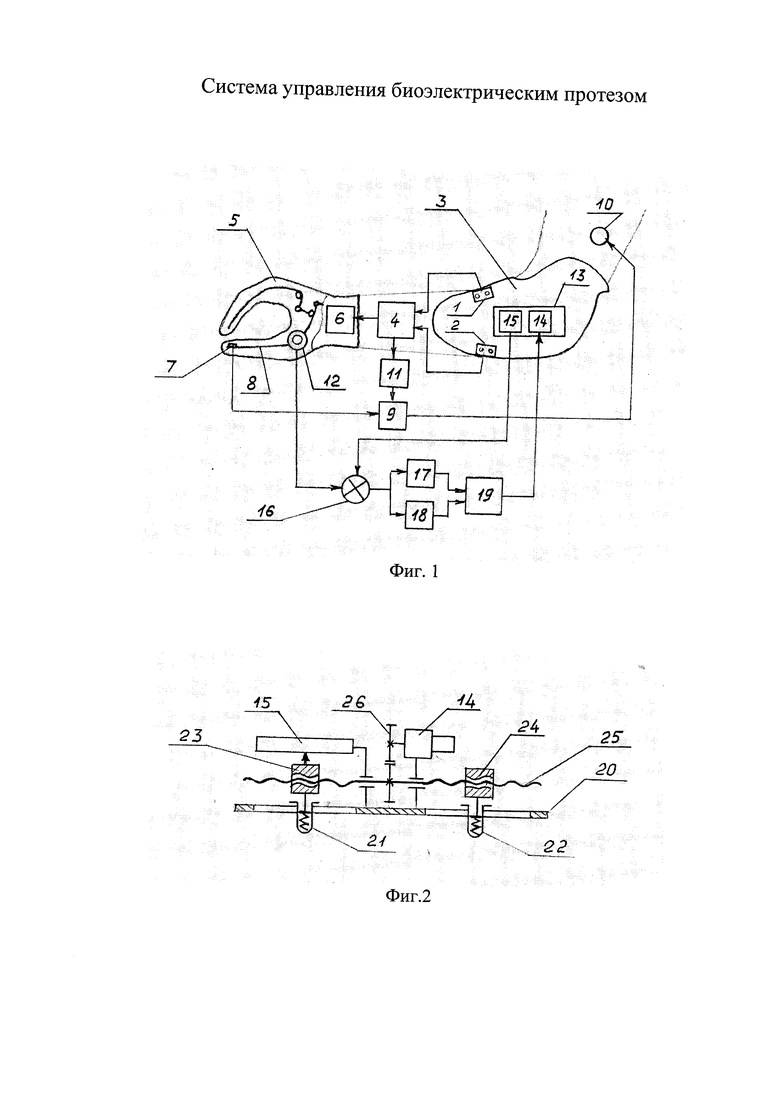
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена структурная схема системы управления биоэлектрическим протезом, а на фиг. 2 представлена кинематическая схема модуля устройства позиционного очувствления.
Система управления биоэлектрическим протезом содержит электроды (токосъемники) 1 и 2, встроенные в приемную гильзу 3 и соединенные с электронным блоком 4 управления перемещением пальцев искусственной кисти 5, содержащей электропривод 6 пальцев, с которым соединен электронный блок 4, датчик давления 7, расположенный в первом пальце 8 искусственной кисти, соединенный с преобразователем 9 силы сжатия, который соединен с вибратором 10, при этом блок управления 4 соединен с блоком 11 временного ограничения работы вибратора, подключенного к преобразователю 9 силы сжатия. Кроме того, система управления содержит датчик 12 угла поворота первого пальца и модуль позиционного очувствления 13, в состав которого входят микроэлектропривод 14 и датчик 15 перемещения активаторов, при этом в канале управления микроэлектроприводом 14 датчики 12 и 15 подключены к сумматору 16, соединенному с первым и вторым импульсными преобразователи 17 и 18, подключенными к усилителю мощности 19, который соединен с микроэлектроприводом 14. При этом модуль позиционного очувствления содержит основание 20 с продольными пазами, в которые вставлены с возможностью продольного перемещения и соприкасающиеся с поверхностью кожи оператора-инвалида контактные элементы 21, 22 двух активаторов 23, 24, кинематически посредством ходовых гаек соединенных с шарнирно закрепленным на основании ходовым винтом 25, один конец которого имеет правую, а второй левую резьбу, причем контактные элементы активаторов выполнены подпружиненными, а ходовой винт кинематически, например, посредством зубчатой передачи 26 соединен с микроэлектроприводом 14, неподвижно закрепленным на основании 20. При этом один из активаторов, например, 23 присоединен к подвижному звену закрепленного на основании датчика 15 перемещения активаторов, выполненного, например, в виде потенциометра поступательного типа.
Система управления биоэлектрическим протезом работает следующим образом.
В исходном состоянии пальцы искусственной кисти 4 сомкнуты. При подаче сигнала от электродов 1 на электронный блок управления 4 управления перемещением пальцев искусственной кисти 5 электропривод 6 пальцев приводит пальцы кисти в движение на раскрытие, а при подаче сигнала от электродов 2 выполняется смыкание пальцев. В процессе касания первым пальцем 8 захватываемого объекта срабатывает датчик давления 7, который через преобразователь 9 силы сжатия включает вибратор 10, информирующий инвалида-оператора о касании или захвате объекта пальцами кисти. При этом блок 11 ограничивает время работы вибратора с целью исключить утомление инвалида-оператора при постоянном включении вибратора.
В процессе движения пальцев кисти датчик 12 угла поворота первого пальца регистрирует позиционное положение пальцев кисти. Этот сигнал направляется на сумматор 16 канала управления микроэлектроприводом 14 модуля позиционного очувствления 13, одновременно на сумматор направляется сигнал от датчика 15 перемещения активаторов, являющегося датчиком отрицательной обратной связи в канале управления микроэлектроприводом 14 модуля позиционного очувствления 13. Далее от сумматора 16 разность сигналов поступает на импульсные преобразователи 17 и 18, а затем на усилитель мощности 19, подключенный к микроэлектроприводу 14, который вращает в ту или другую сторону ходовой винт 25, с одной стороны которого нарезана правая, а с другой левая резьба. Вращение винта приводит в поступательное движение активаторы 23, 24, которые кинематически соединены с ним посредством ходовых гаек. Перемещение активаторов происходит синхронно с движением пальцев искусственной кисти. Инвалид-оператор ощущает встречное или разнонаправленное движение контактных элементов, благодаря чему в системе управления реализуется позиционная обратная связь.
Таким образом, предлагаемая система управления биоэлектрическим протезом с модулем устройства позиционного очувствления позволяет инвалиду-оператору в естественном режиме получить информацию о положении пальцев кисти, о начале движения, окончании движения и процессе самого движения, в том числе, например, при действии за препятствием.
Положительный эффект заявляемого изобретения заключается в следующем: обеспечивается удобство пользования протезом при самообслуживании, повышается точность координации позиционного положения пальцев и дозирования усилия, благодаря чему сокращается время выполнения рабочих операций при выполнении целенаправленных действий. При этом модуль позиционного очувствления может быть установлен не только на культе, но и на других сегментах конечностей и частях тела.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство позиционного очувствления подвижности пальцев искусственной кисти | 2018 |
|
RU2702304C1 |
| УСТРОЙСТВО ПОЗИЦИОННОГО ОЧУВСТВЛЕНИЯ ПОДВИЖНОСТИ ПАЛЬЦЕВ ИСКУССТВЕННОЙ КИСТИ | 2019 |
|
RU2712306C1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ ПЛЕЧА | 2019 |
|
RU2744605C2 |
| ПРОТЕЗ КИСТИ | 2012 |
|
RU2506931C2 |
| ИСКУССТВЕННАЯ КИСТЬ | 2011 |
|
RU2472469C1 |
| Многофункциональный активный ортез руки | 2022 |
|
RU2791396C1 |
| ПРОТЕЗ ГОЛЕНИ | 2019 |
|
RU2695948C1 |
| УСТРОЙСТВО ДЛЯ СРАВНИТЕЛЬНЫХ ИСПЫТАНИЙ СИСТЕМ УПРАВЛЕНИЯ АКТИВНЫХ МНОГОФУНКЦИОНАЛЬНЫХ ПРОТЕЗОВ ПЛЕЧА РАЗРАБОТЧИКОМ СО ЗДОРОВЫМИ РУКАМИ | 2020 |
|
RU2744657C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 2010 |
|
RU2427349C1 |
Изобретение относится к медицине. Система управления биоэлектрическим протезом содержит искусственную электромеханическую кисть, электроды, блок управления перемещениями пальцев искусственной кисти, датчик давления, преобразователь силы сжатия, вибратор и блок временного ограничения работы вибратора, а также датчик угловых перемещений (например, в виде потенциометра), укрепленный на оси шарнира первого пальца. В систему управления введено устройство позиционного очувствления подвижности пальцев искусственной кисти и система управления его подвижными активаторами. Устройство позиционного очувствления выполнено в виде модуля, содержащего основание с продольными пазами, в которые вставлены с возможностью продольного перемещения контактные элементы двух активаторов, кинематически посредством ходовых гаек соединенных с шарнирно закрепленным на основании ходовым винтом, один конец которого имеет правую, а второй левую резьбу. Контактные элементы активаторов выполнены подпружиненными, а ходовой винт кинематически, например, посредством зубчатой передачи соединен с микроэлектроприводом, неподвижно закрепленным на основании. Один из активаторов соединен с подвижным звеном закрепленного на основании датчика перемещения активаторов, например, выполненного в виде потенциометра поступательного типа. В канале управления микроэлектроприводом активаторов датчик угловых перемещений первого пальца и датчик перемещения активаторов, представляющий собой датчик обратной связи, соединен со входом сумматора, на выходе которого подключены первый и второй импульсные преобразователи, соединенные с усилителем мощности, выход которого подключен к электроприводу перемещения активаторов. Изобретение обеспечивает повышение удобства инвалида-оператора при выполнении целенаправленных действий по самообслуживанию путем повышения естественности управления и точности управляющих действий благодаря введению устройства позиционного очувствления подвижности пальцев искусственной кисти и системы управления его подвижными активаторами. 2 ил.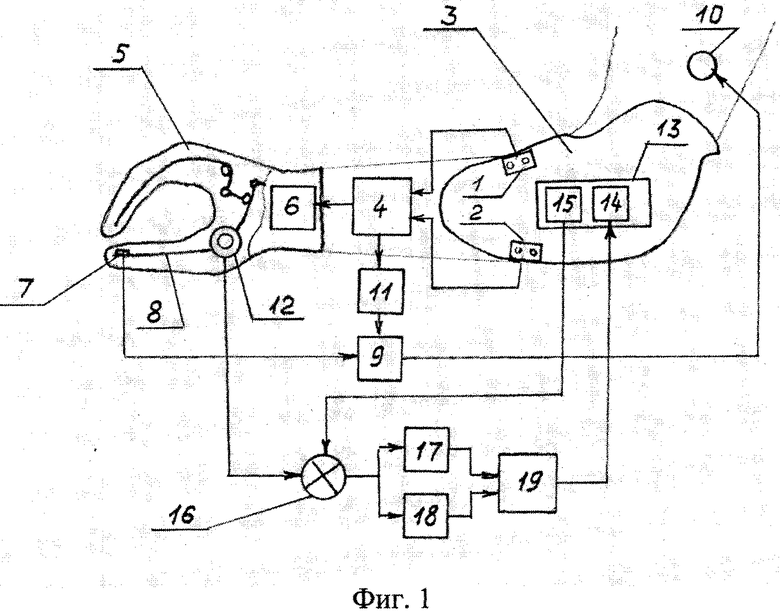
Система управления биоэлектрическим протезом, содержащая искусственную электромеханическую кисть, электроды, блок управления перемещениями пальцев искусственной кисти, датчик давления, преобразователь силы сжатия, вибратор и блок временного ограничения работы вибратора, а также датчик угловых перемещений (например, в виде потенциометра), укрепленный на оси шарнира первого пальца, отличающаяся тем, что в систему управления введено устройство позиционного очувствления подвижности пальцев искусственной кисти и система управления его подвижными активаторами, при этом устройство позиционного очувствления выполнено в виде модуля, содержащего основание с продольными пазами в которые вставлены с возможностью продольного перемещения контактные элементы двух активаторов кинематически посредством ходовых гаек соединенных с шарнирно закрепленным на основании ходовым винтом, один конец которого имеет правую, а второй левую резьбу, причем контактные элементы активаторов выполнены подпружиненными, а ходовой винт кинематически, например, посредством зубчатой передачи соединен с микроэлектроприводом, неподвижно закрепленным на основании, при этом один из активаторов соединен с подвижным звеном закрепленного на основании датчика перемещения активаторов, например, выполненного в виде потенциометра поступательного типа, причем в канале управления микроэлектроприводом активаторов датчик угловых перемещений первого пальца и датчик перемещения активаторов, представляющий собой датчик обратной связи, соединен со входом сумматора, на выходе которого подключены первый и второй импульсные преобразователи, соединенные с усилителем мощности, выход которого подключен к электроприводу перемещения активаторов.
| СИСТЕМА УПРАВЛЕНИЯ БИОЭЛЕКТРИЧЕСКИМИ ПРОТЕЗАМИ | 0 |
|
SU243142A1 |
| US 2015351939 A1, 10.12.2015 | |||
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 2010 |
|
RU2427349C1 |
| СИСТЕМА УПРАВЛЕИИЯ БИОЭЛЕКТРИЧЕСКИМИ ПРОТЕЗАМИ ВЕРХНИХ КОНЕЧИОСТЕЙ | 0 |
|
SU278023A1 |
| Искусственная кисть | 1986 |
|
SU1438766A1 |
| US 20070021841 A1, 25.01.2007 | |||
| CN 204909745 U, 30.12.2015. | |||

