, 2. Устройство по п. 1, о т л и.чающееся тем,что электрическая связь выполнена в виде контактных колец, установленных на корпусе платформы и подключенных-к выходу дифференциатора, а также электрических щеток, взаимодействующих с крльцс№М и подключенных к входу аналогхэ-ци;фрового преобразовате71я.
3.Устройство ПОП.1, отличающееся тем, что кинематическая связь суппорта с неподвижной осью выполнена в виде звена, одраэукадего с суппортом винтовую пару,
и двух конических шестерен, одна из котрЕялх закреплена на конце звена, а дфугая установлена на оси и снабжена средством регулирования ее сцепления с осью.
4.Устройство по пп. 1 и 3, о тл и чающееся тем, что, средство регулирования сцеплений выполнено в виде подпружиненной фрикционной муфты с механизмом изменения затяжки пружины.
5. Устройство по п. 1, о т л ичающееся тем, что, с целью расширения диапазона и повышения про изводительности измерений при сохранении габаритов устройства и улучшении балансировки плaтфop ы, оно снабжено несколькими грузовыми чашами с механизмами их перемещения, а силойзмерительный блок содержит соответствующее количеству чгиа число датчиков и дифференциаторов, при,это чашн и механиэ№1 размещены с обеспечением конгруэнтности отрезков перемещения суппортов относительно поворотов платформы на угол, кратный Збо7 Н, где Н - число чаш. . 6. Устройство по пп. 1 и 3, о т л и ч а ю щ е е с я тем, что электропривод содержит систему регулированная величины и знака скорости вращешщ электродвигателя j а также предохранительные средства для его отключения рх источника питания при превьвиении нагрузки на привод ее пороговйго значения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения массы тела в невесомости | 1981 |
|
SU981831A1 |
| Автоматизированный склад | 1978 |
|
SU710874A1 |
| БЕЗЫНЕРЦИОННЫЙ СИЛОВОЙ ГИРОСКОП | 2006 |
|
RU2308003C1 |
| Гусеничный транспортер | 2023 |
|
RU2798887C1 |
| Стенд для слесарно-доводочных работ | 1989 |
|
SU1660804A1 |
| УСТРОЙСТВО ДЛЯ МАССАЖА И ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2004 |
|
RU2262915C1 |
| Двухзвенное гусеничное транспортное средство для перевозки длинномерных грузов | 2021 |
|
RU2765311C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИЗМЕНЕНИЯ МАССЫ РОТАЦИОННОГО УСТРОЙСТВА В ЗАВИСИМОСТИ ОТ ИЗМЕНЕНИЯ ЕГО ЧАСТОТЫ ВРАЩЕНИЯ И РАДИАЛЬНЫХ СИЛ, ПЕРЕДАВАЕМЫХ ШЕЙКАМИ РОТАЦИОННОГО УСТРОЙСТВА НА ПОДШИПНИКИ, В РАЗНЫХ ДИАМЕТРАЛЬНЫХ ПРОДОЛЬНЫХ ПЛОСКОСТЯХ РОТАЦИОННОГО УСТРОЙСТВА В ЗАВИСИМОСТИ ОТ УГЛА ЕГО ПОВОРОТА ВОКРУГ ОСИ ПРИ СООТВЕТСТВУЮЩЕЙ ЧАСТОТЕ ЕГО ВРАЩЕНИЯ | 1998 |
|
RU2150089C1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| ГРУЗОВОЙ ПОДЪЕМНИК | 2001 |
|
RU2210525C1 |

Изобретение относится к вёсоиз.мерительным приборам специального назначения, в частности, к устройствам для определения массы относительно небольших объектов в космического полета.
Наиболее близким техническим решением к предлагаемому является устройство для определения массы Тела в невесомости, содержащее корпус с опорой, платформу, установлен,ную с возможностью вращения относительно опоры у электропривод вращения платформы, грузовую чашу с механизмом ее перемещения относительно платформы и силоизмерительный блок С13 . Работа устройства осно вана на принципе уравновешива4)ия рычйга с телом, массу которого определяют в поле центробежных сил инерции. Для уравновешивания рычага используется магнитное взаимодействие элементов механизма перемещения и силоизмерительного блока. ,
-Недостатком известного устройства является низкая точность определения массы деформируег их тел и неустойчивый динамический режим уравноваиивания рычага. Причем неустойчивость возрастает вследствие за висимости деформации тела от величины действующей на него силы реакции со стороны грузовой чаши.
Цель изобретения - повышение точности определения массы тела за счет
обеспечения контроля влияния деформируемости тела на результаты измерений и стабилизации динамического режима определения массы.
. ;., .,,. . . ..
указанная цель достигается тем, что 8 устройстве для определения массы тела 6 невесомости содержащем .корпус с рпорой, платформу, установлейкую с возможностью вращения относительно,опоры, электропривод вращения платформы, грузовую чашу с механизмом ее перемещения относительно ппатфорки и сйлоизмерие тельшяй блок/ опора выполнена в виде неподвижной относительно корпуса оси, мехаинэм перемещения грузовой выполнен в виде суппорта, установленного с возможностью Шrcтyп.ateльнoгo перемещения
в направлении, непарал фбльном оси
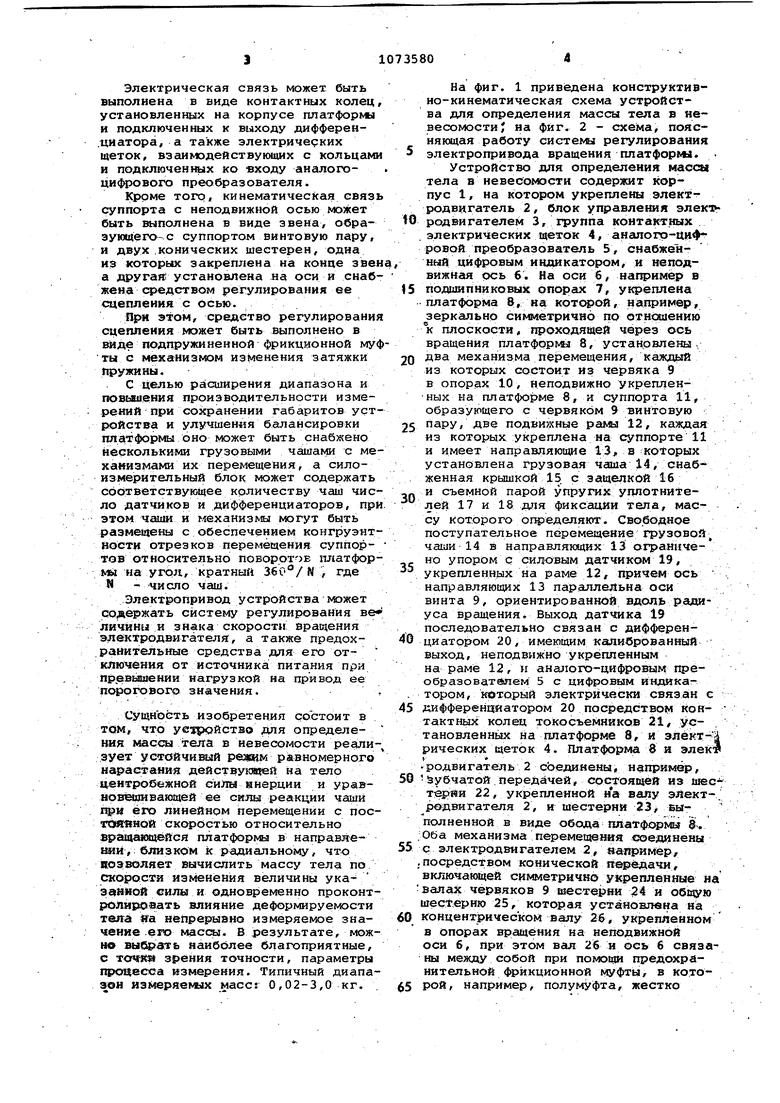
вращения платформы, и 1Ш11ема1тически связанногс} с неподшжеюй осью, чаша установлена в напрявлянт9 х жестко свяэаншлх с суппо1Угем, и снабжена ограничителем пе{ 9Ме1«ения в этих нащ авл1Я8Я1|их, силонзмерительный блок содерж 1т датчик составляю г(ей силы взаимЬдейС1Г9Ия между чшцей и в направлении их 0 взаимного перемещения, а «акже последовательно соединенные аналого-цифровой преобразователь и дифференциатор, вход которого электрически связан с датчиком. Электрическая связь может быть выполнена в виде контактных колец установленных на корпусе платформы и подключенных к выходу дифферен.диатора, а также электричедких щеток, взанМОдействующих с кольцам и подключенных ко входу аналогоЦИ4ФОВОГО преобразователя. Кроме того, кинематическая связ суппорта с неподвижной осью может быть исполнена в виде звена, обра эующего-с суппортом винтовую пару, и двух .конических шестерен, одна из которых закреплена на конде зве а другая установлена на оси и снаб жена средством регулирования ее сцепления с осью. При этом, средство регулировани сцепления может быть выполнено в аяяе подпружиненной фрикционной му ты с механизмом изменения затяжки пружины. С целью расширения диапазона и пошлаения производительности измерений при сохранении габаритов уст ройства и улучшения балансировки платформы оно может быть снабжено несколькими грузовыми чашаш с ме касшэмами их перемещения, а силоизмерительНый блок может содержать соответствующее количеству чаш чис ло датчиков и дифференциаторов, пр этом чаши и механизмы могут быть раэмеиЕены с обеспечением конгруэнт ности отрезков перемещения суйпортов относительно поворотов илатфор мм на угол, кратный N , где И - ЧИСЛО чаш. Электропривод устройства может солержать систему регулирования ве лкчкпи и знака скорости вращения электродвигателя:, а также предохранительные средства для его отключения от источника питания при Превышении нагрузкой на привод ее пс огового значения. Сущность изобретения состоит в том, что уетройство для определеВИЯ массы телга в невесомости реализует УСТОЙЧИВЫЙ реяеим равномерного нарастания действуювцей на тело центробежной силы инерции и уравновёциваквдей ее силы реакции чаши его линейном перемещении с посТОЯтнОй сксчростью относительно еращакяц ся платформы в направлении,; близком к радиальному, что позволяет вычислить массу тела по скорости изменения величины указеннйой силы и одновременно проконтроЛи{ ать влияние деформируемости тшга а непрерывно измеряемое значение .его массял. в результате, можн выбра Ь наиболее благоприятные, с тоедш зрения точности, параметры прсщесса измерения. Типичный диапазон измеряемых масс: 0,02-3,0 кг. На фиг. 1 приведена конструктивно-кинематическая схема устройства для определения массы тела в невесомости на фиг. 2 - схема, поясняющая работу системы регулирования электропривода вращения платфор141. Устройство для определения массы тела в невесомости содержит корпус 1, на котором укреплены электродвигатель 2 , блок управления элек1У родвигателеМ 3, группа контакт.ных электрических щеток 4, аналогр-цнфровой преобразователь 5, снабженный дифровым индикатором, и неподвижная ось 6. На оси б, в подшипниковых опорах 7, укреплена платформа 8, на котсфой, например, зеркально симметрично по отношению °к плоскости, проходящей через ось вращения плaтфpp « 8, установлены. два механизма перемещения, каждый из которых состоит из червяка 9 в опорах 10, неподвижно укрепденных на платформе 8, и суппорта 11, образующего с червяком 9 винтовую пару, две подвижные рамы 12, каждая из которых укреплена на суппорте 11 и имеет направляющие 13 в которых установлена грузовая чаша 14, снабженная крышкой 15 с защелкой 16 и съемной парой упругих ущ1Отни±елей 17 и 18 для фиксации тела, массу которого определяют. Свободное поступательное перемещение грузовой, чаши 14 в направляющих 13 ограниче- но упором с силовым датчиком 19, укрепленных на раме 12, причем ось направляюйщх 13 параллельна оси винта 9, ориентированной вдоль ргцшуса вращения. Выход датчика 19 последовательно связан с дифференциатором 20, имеющим калиброванный выход, неподвижно укрепленным на раме 12, п аналого-цифровым преобразоватаяем 5 с цифровым индикатором , 1 торый электрически связан с дифференциатором 20 посредством кон- тактных колец токосъемников 21, установленных на платформе 8, и элёктрических щеток 4. Платформа 8 и элек5 родвигатель 2 сЬединены, например, Губчатой передачей, состоящей иэ шестёрви 22, укрепленной на валу эЛект-. родвигателя 2, и шестерни 23/ выполненной в виде обода платфорт 8-. Оба механизма перемещения соешыены с электродвигателем 2, апример, посредством конической n jejJia4H, включакяцей симметрично укрепленные на валах червяков 9 шестеряи Я4 и общую 25, которая установлена на концентрическом валу 26, укрепленном в опорах вращения на неподвижной оси 6, При этом вал 2в и ось 6 связаны между собой при помощи предохранительной 4« икцион ной муфты, в которой, например, полумуфта жестко
связанпая с валок{ 26, включает в себ коническую шестерню 25 с неподвижно укрепленным на ней диском 27, а полу муфта, связанная с осью б, выполнена
5виде кррпусированного диска.28, поступательно перемёщанядегося на оси 6, причем осевое нажатие дисков
27 и 28 обеспечено цилиндрической пр жиной 29, одним своим торцом опертой на корпус диска 28, а другим на дно опорного стакана 30. Опорный стакан 30 и ось б образуют винтовую пару, поло)(сение которой фиксировано контргайкой 31,
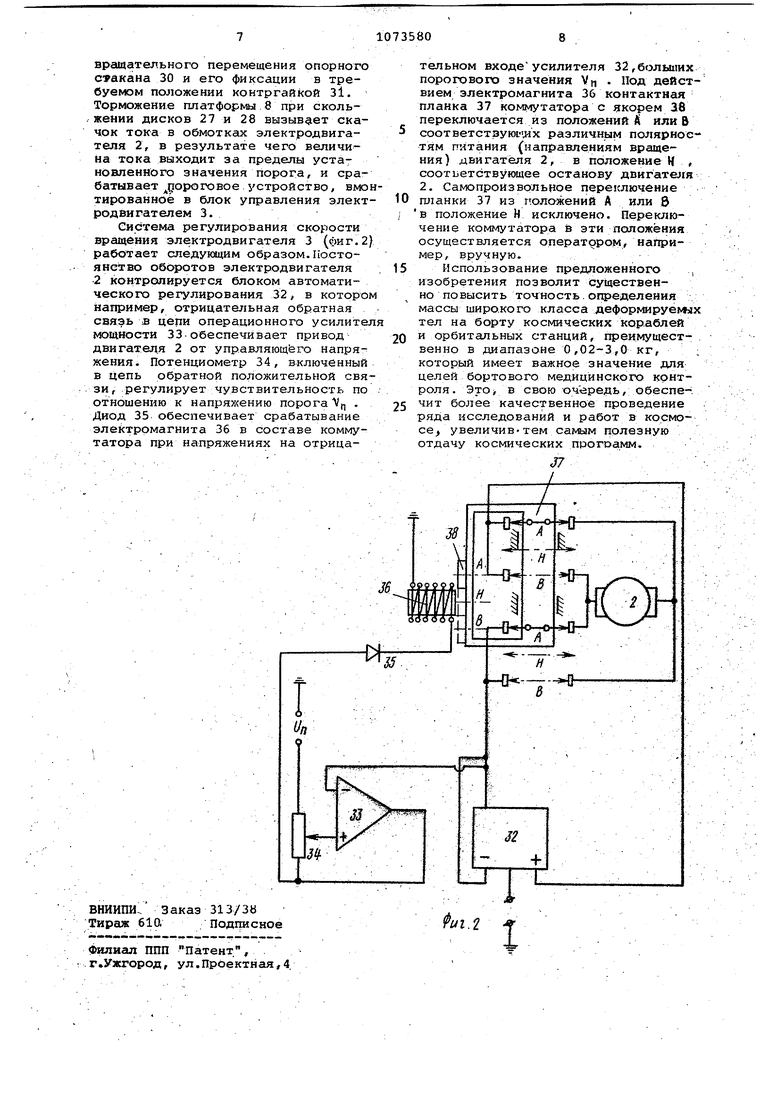
Система регулирования скорос ти вращения электродвигателя 2 (фиг. 2 содерзкит блок 32, Управляющий напряжением в обмотке двигателя, операционный усилитель 33 с обратной связ в его цепи, потенциометр 34, диод 35 включенный э цепь обмотки электродвигателя 36, контактную планку 37 коммутатора с якорем 38. Пороговое устройство в данной схеме выполнено на базе триггера Шмидта, для чего отрицательный вход усилителя 33 подключен к управляющему выходу блока 32, а потенциометр 34 включен в цепь обратной положительной связи данного усилителя.
Устройство для определения массы работает следующим образом.,
Тело, массу которого определяют, размещают на дне грузовой чаши 14, которое предварительно устилают
слоем упругого уплотнителя 18, после чего на тело накладывают еще один слой упругого уплотнителя 17, причем толщины слоев выбирают с таким расчетом, чтобы после прижатиа их крышкой 15, фиксируемой защелкой 16, расположение тела внутри чаши 14 оставалось неизменным.
Подают питание в измерительную цепь в составе силового датчика 19, дифференциатора 20, аналого-цифровоого преобразователя 5, снабженного цифровым индикатором, и устанавливают заданное направление вращейия электродвигателя 2, Включают блок 3, который обеспечивает вращение электродвигателя 2 и постоянствОлзаданного значения угловой скорости. Равномерное вр ащение ва- ла электродвигателя 2 при помощи шестерен 22 и 23 передается платФорме 8/ вращающейся вокруг оси
6в опорах 7, при этом коническая шестерня 24 катится по неподвижной конической шестерне 25, которая фиксирована на оси 6 благог Даря сцеплению между дисками 27 и 28 предохранительной муфты, соединяющей с осью 6 вал 26.
Вращение шестерни 24 вызывает ;.сксхпьжение суппорта 11 совместно ..срамой 12 в радиальном направлеНИИ. При этом грузовая чаша 14 с фиксированным в ней телом под действием переменной по величине центробежной силы оказывает давление на датчик 19, удерживаясь неподвижно на раме 12 направлякяцими 13 и силой реакции со стороны датчика 19. Переменный электрический сигнал от датчика,19, пропорциональный величине действукяцей на грузовую чашу 14 центробежной силы, усиливается и дифференцируется дифференциатором 20 и калибруется в единицах массы при помощи, например, выходного делителя напряжения. Откалиброванный сигнал поступает на вход аналого-цифрового преобразователя 5, где преобразуется в число и визуализируется на табло его цифрового индикатора. Калибровка выхода дифференциатора 20 осуществляется при постоянных угловой скорости вращения платформы 8 и скорости скольжения суппорта 11, в силу чего масса оказывается пропорциональной модулю производной центробежной силы по времени. Измерение масса считается достоверным, если визуально наблюдаемые колбания ее величины, обусловленные деформацией тела в переменном силовом поле, не выходят, за установленные пределы погрешности измерений.
Для вычисления массы тела М используют формулу
. ()-it;i)(i:)yV
где bj, - производная по. времени
составляющей силы, измерямой датчиком 19, Со - постоянная угловая скорос
вращения платформа/ V - постоянная скорость па раЛлельного переноса тела - относительно платформы} 6 - единичный вектор в направ-с лении переноса, тела; - единичный вектор вдоль ос вращения платформы; И - единичный вектор в направлении измерения составлякйцей силы.
Вращение червяка и скольжение суппорта 11 прекращаются в одном из крних положений суппорта 11, при этом прекращается вращение конической ;ше ::терни 24 одновременно в приводах обоих тягошах механизмов, что приводит к скачку Крутящего момента на валу 26 и обуславливает взаимное скольжение дисков 27 и 28, соответствуйИ $ее срабатыванию предохранительной фрикционной муфты, причем ограничительное значение крутящего -момента устанавливается путем,регулировки степени сжатия пружины 29 при Помощи поступательной
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Центробежный измеритель массы | 1977 |
|
SU732681A1 |
