Изобретение относится к управлению системами общего назначения, в частности к автоматическим электрическим регуляторам.
Цель изобретения - повышение точ- цости работы системы и улучшение условий технической реализуемости при меняющихся параметрах, в частности коэффициенте усиления объекта.
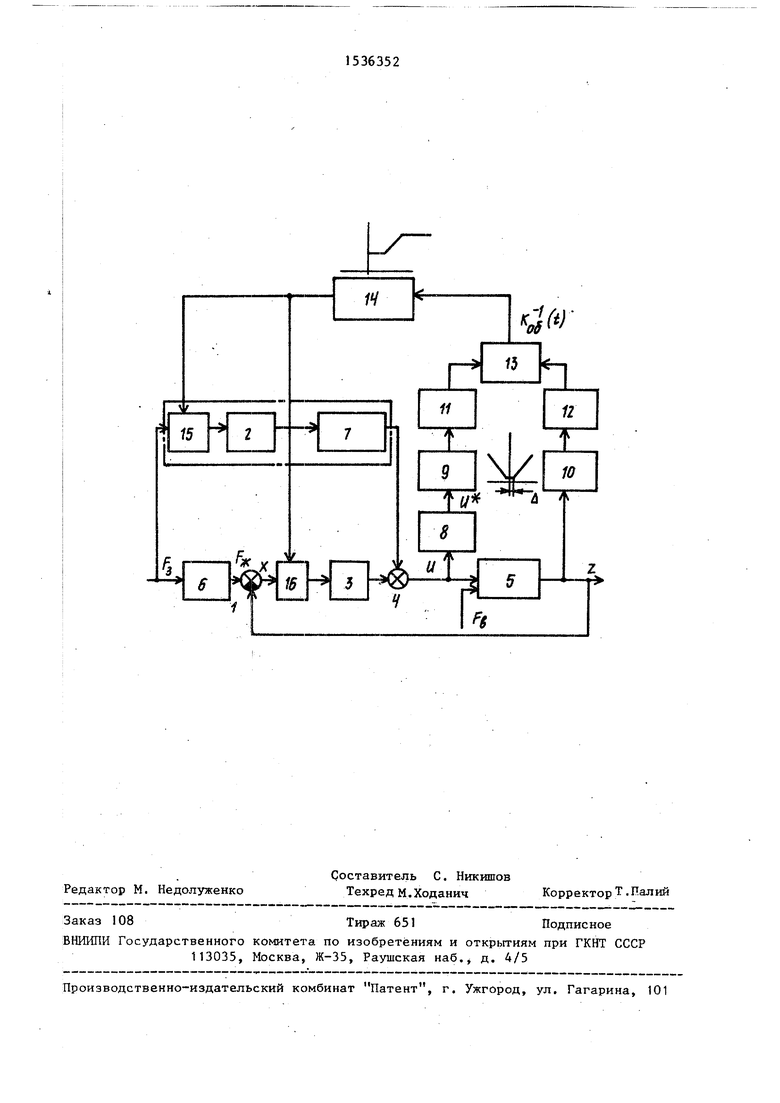
На чертеже приведена блок-схема системы.
Система содержит первый сумматор 1, дифференциатор с форсированием 2, ПИД-регулятор 3, второй сумматор 4, объект 5 управления, первый 6 и второй 7 фильтры нижних частот второго порядка, интегратор с запаздыванием 8, первьй 9 и второй 10 выпрямители
с зоной нечувствительности, первый 11 и второй 12 фильтры нижних частот первого порядка, блок 13 деления, -ограничитель 14 верхнего и нижнего уровней, первый 15 и второй 16 блоки умножения.
На чертеже приняты следующие обоз- значения: F3 - задающее воздействие на систему} Z - выходной сигнал объекта управления; F - возмущающее воздействие; F ж - желаемый вид переходного процесса, X - сигнал ошибки системы, Kof(t) - переменный коэффициент усиления объекта управления; U- сигнал управления; U - сигнал на выходе интегратора с запаздыванием.
Элементы 1-13 системы реализуются с помощью многофункциональных зналоел
оо
сь
GO
СП
ю
говых регулирующих устройств автома- рлси.
Система работает следующим образом.
Задающее воздействие F3 поступает Йа вход первого фильтра нижних частот второго порядка 6, формирующего желаемый вид переходного процесса F # (t) № далее - на основной контур регулирования. Регулятор основного контура J регулирования, содержащий блоки 16 и 3, застраивается исходя из условий наи- jr/чшей отработки возмущений F(t), Действующих на объект 5 управления.
Второй фильтр нижних частот второго 1( йорядка 7 этой цепи введен для обеспечения условия физической реализуемости дифференциатора с форсированием 2 пои инерционном объекте 5 управления .Пусть,, Например, объект управления 5 описы- 2 Дается передаточной функцией инерци- ({шного интегрирующего звена
w (р т Kpy(fc)..
Vp; p(To5p+i) 2
В соответствии с условием абсолютной ,инвариантности
t
«t(P).HK( Р ,
t.e. блок 2 не отвечает условиям фи- з ической осуществимости, так как по- йазатель степени его числителя превышает показатель степени знаменателя.
Если же выбрать в предлагаемом устройстве передаточные функции фильтров нижних частот втооого порядка 6 и 7
W,(P) W,(P) .
Где Т„ и
f - соответственно желаемые постоянная времени и декремент затухания
1
«rfw -т-ш
w4(p) - + О,
рогда эквивалентное звено W9(P), BHS- Деленное на чертеже пунктиром, соответствующее последовательному соединению блоков 15, 2 и 14, отвечает ловиям физической реализуемости
W,(P) - ) -
50
PCTpgP + 1)
+ 2(ЖТЖР + 1
При этом обеспечивается равенство нулю ошибки X системы от задающего воздействия Fj(P).
В отсутствии возмущающего воздействия
Z(P) - F3(P)W ,(P)W,(P) - F3 . t
.с;
р( l)
0«
Kftg(t)
(Т +1) P(T0,rP + 1)
x
-FX(P); X(P)-F(P) -Z(P) - 0
Блоки 8-13 предназначены для идентификации K(t) - обратной величины коэффициента усиления объекта 5 управления. Интегратор с запаздыванием 8 вводится для устранения влияния динамического запаздывания объекта 5 управления при идентификации обратной величины его коэффициента усиления:
Wft(P)
1
Р(Т06Р + 1)
Деление сигналов U и Z в отсутствии помех и пренебрежимо малых несоответствиях в динамике блоков Wy и We дает значение величины (t);
U(P) „ U(P)W,(P)
Z(P)
U(P)W5(P)
0
5
5
0
P(TogP -f I)v-VM
р(толр + )
При наличии высокочастотных помех и несоответствии динамики блоков W.
О
и W,. (что на практике всегда может иметь место)при непосредственном делении сигналов U и Z возможны значительные колебания их частного от деления, т.е. сигнала (t). Вследствие этого возникает необходимость перед подачей этих сигналов на блок 13 деления предварительно выпрямить их и сгладить, что и осуществляется блоками 9, 10 и Н, 12.
Сигнал (t) с выхода блока 13 деления ограничивается сверху и снизу ограничителем 14 верхнего и нижнего уровней в соответствии с априорной информацией о возможном диапазоне изменения коэффициента усиления
K0j(t) объекта 5 и подается на входы блоков 15 и 6 умножения. Наличие блока 14 повышает надежность системы при отказах цепей идентификации (блоки 8-13) обратного значения коэффициента (t) усиления объекта 5 управления . При нормальной работе указанных цепей этот блок ограничивает результат деления на выходе блока 13 при нулевых и малых сигналах на его входах.
Блок 16 умножения устраняет влияние переменного коэффициента усиления
объекта 5 на передаточную функцию ра-15 условий технической реализуемости
зомкнутого: основного контура, что облегчает обеспечение условий устойчивости этого контура в замкнутом состоянии при достаточно больших коэффициентах усиления и наличии дополнительных малых запаздываний, присущих динамике реального объекта 5 управления . В конечном счете это также приводит к увеличению точности работы системы в целом.
Для сохранения работоспособности блока 13 деления с целью недопущения деления очень малых сигналов выпрямители 9 и 10 выполнены с зонами нечувствительности лди & 10 . При уменьшении входных сигналов выпрямителей ниже установленного уровня д их выходные сигналы имеют минимально допустимые величины. Отношение йч/ д ,„
/-1
25
30
К
об
19 ю выбирается равным наиболее вепри меняющихся параметрах объекта управления, в нее введены последовательно соединенные блок деления ограничитель верхнего и нижнего
20 уровнен, к выходу которого подсоед нены первые входы первого и второг блоков умножения, вход системы соединен через первый фильтр нижних частот второго порядка, с неинвертирующим входом первого сумматора выход которого соединен с вторым в дом второго блока умножения, выходом подсоединенного к входу ПИД-ре- гулятора, выход дифференциатора с форсированием связан через второй фильтр нижних частот второго поряд ка с вторым входом второго суммато ра, вход первого фильтра нижних час тот второго порядка соединен с вто35 рым входом первого блока умножения выход которого соединен с входом ди ференциатора с форсированием, выход второго сумматора через последовательно соединенные интегратор с зароятному, например, среднему значению К обратной величины коэффициента усиления объекта из диапазона его изменения .
Блок умножения 15 введен для повышения точности работы системы путем устранения влияния переменного коэффициента усиления K0s(t) объекта 5 на условие абсолютной инвариантности во втором канале распространения задающего воздействия FJ.
Предлагаемая система может найти применение для высокоточного управ-
ления промышленными объектами при меняющихся условиях работы. Формула изобретения
Комбинированная система управления, содержащая первый сумматор, инвертирующий вход которого подсоединен к выходу объекта управления и выходу системы, дифференциатор с форсированием, ПИД-регулятор, соединенный через второй сумматор с входом объекта управления, отличающаяся тем, что, с целью повышения точности работы системы и улучшения
5
0
при меняющихся параметрах объекта управления, в нее введены последовательно соединенные блок деления и ограничитель верхнего и нижнего
0 уровнен, к выходу которого подсоединены первые входы первого и второго блоков умножения, вход системы соединен через первый фильтр нижних частот второго порядка, с неинвертирующим входом первого сумматора, выход которого соединен с вторым входом второго блока умножения, выходом подсоединенного к входу ПИД-ре- гулятора, выход дифференциатора с форсированием связан через второй фильтр нижних частот второго порядка с вторым входом второго сумматора, вход первого фильтра нижних частот второго порядка соединен с вто5 рым входом первого блока умножения, выход которого соединен с входом дифференциатора с форсированием, выход второго сумматора через последовательно соединенные интегратор с за0 паздыванием, первый выпрямитель с зоной нечувствительности и первый фильтр нижних частот первого порядка связан с первым входом блока деления, выход системы через, последова-
5 тельно соединенные второй выпрямитель ,с зоной нечувствительности и второй фильтр нижних частот первого порядка подключен к второму входу блока деления.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Устройство автоматического регулирования толщины полосы на непрерывном прокатном стане | 1987 |
|
SU1435347A1 |
| Адаптивный регулятор с регулируемой обратной связью | 1985 |
|
SU1287104A1 |
| Система управления | 1977 |
|
SU732808A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Нелинейное корректирующее устройство с фазовым опережением | 1988 |
|
SU1718182A1 |
| Регулятор с переменной структурой | 1978 |
|
SU736046A1 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР НАПРЯЖЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА | 2011 |
|
RU2465717C1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ | 2015 |
|
RU2605946C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ДВИЖЕНИЕМ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2522855C1 |
Изобретение касается управления системами общего назначения, в частности автоматических электрических регуляторов. Цель изобретения - повышение точности работы системы и улучшение условий технической реализуемости при меняющихся параметрах, в частности коэффициенте усиления инерционного объекта управления. Повышение точности достигается за счет идентификации обратной величины коэффициента усиления объекта управления и соответствующего изменения с помощью блоков умножения коэффициентов усиления регуляторов разомкнутого и замкнутого каналов распределения задающего воздействия. 1 ил.
| Цыпкин Я.З | |||
| Основы теории автоматических систем | |||
| М.: Наука, 1977, с.89-81, рис | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Ялышев А.У., Разоренов О.И | |||
| Многофункциональные аналоговые регулирующие устройства автоматики | |||
| М.: Машиностроение, 1981 | |||
| Основы теории автоматического управления | |||
| /Под ред.Н.Н.Судзиловского | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
