(54) СИСТЕМА УПРАВЛЕНИЯ
1
Изобретение относится к технике оптимального автоматического управления объектЕ1ми с изменяющимся измеряемым запаздыванием и может быть использовано для управления технологическими процессами в химической, металлургической, металлообрабатывающей и-других отраслях народного хозяйства.
Известна система автоматического управления объекта, имеющего изменяющееся измеряемое запаздывание в измерении, которая базируется на самонастраивающем упредителе Смитта и содержит так же регулятор модели объекта, модель инерционной части объекта и блок временных задержек, включенные в обратную связь регуляйора и настраиваемые в соответствии « изменяющимся запаздыванием в измерении 1. Из-за наличия контура положительной обратной связи в этой системе управления возможно возникновение незатухающих колебаний. . Наиболее близким техническим ре. шением к предложенному является квагиоптимальная система управления 2. содержащая блок измерения запаздывания , вход которого соединен с выходсм объекта управления, первый, второй и третий блоки регулируемого запаздывания, первый сумматор, первый и второй входы которого соединены соответственно с выходом интег- ратора и дифференциатора.
Однако и такая система компенсирует изменяющееся загтаздывание только в измерении и не может быть использована для управления объектами
10 с изменяющимся запаздыванием в управлении и, кроме того, имеет низкую точность и неустойчивость.
Цель изобретения - повышение устойчивости, точности и быстродействия
15 системы, а также расширение ее функциональных возможностей.
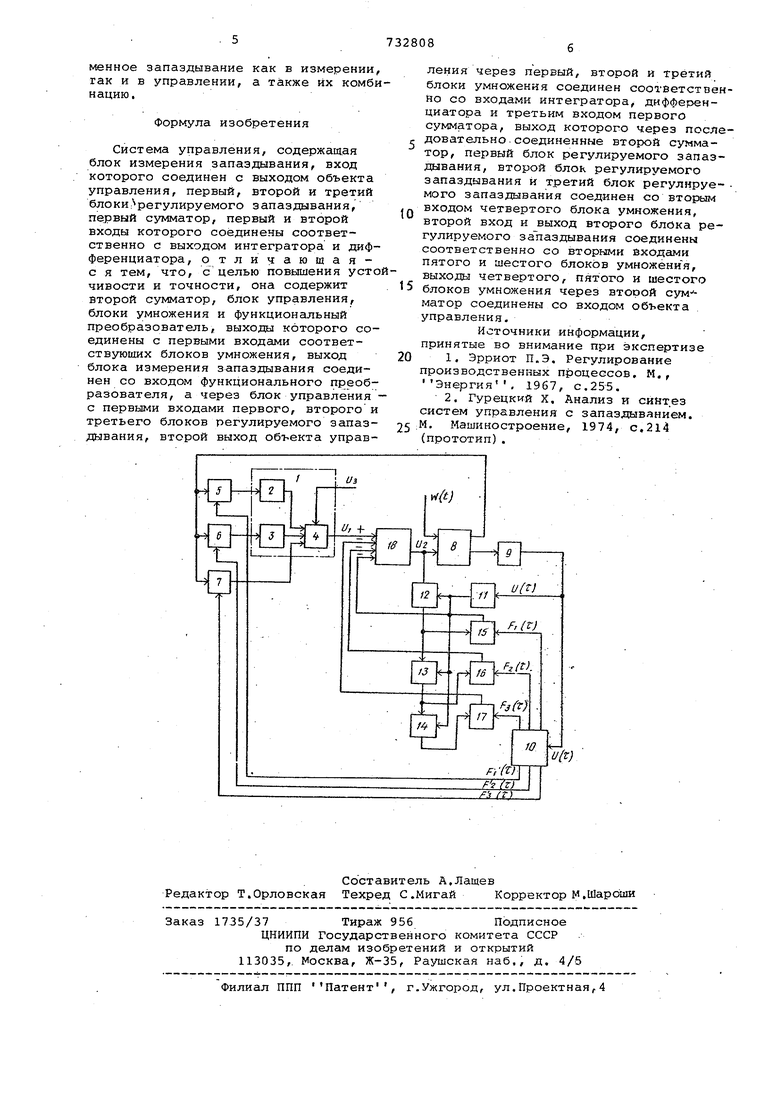
. Указанная цель достигается тем, что в систему введены второй сумматор, блок управления, блоки умножения и функциональный-преобразователь, выходы которого соединены с первыми входами соответствующих блоков умножения. Выход блока измерения запаздывания соединен со входом функциональ25ного преобразователя, а через блок управления - с первыми входами первого, второго и третьего, блоков регулирования запаздывания. Второй выход объекта управления через первый, 30 .1 второй И третий блоки умножения соединен соответственно со входами интегратора, дифференциатора и третьим входом первого сумматора, выход которого через последовательно соеди ненные второй сумматор, первый, второй и третий блоки регулируемого запаздывания соединен со вторым входом четвертого блока умножения. Второй вход и выход второго блока регу лируемого запаздывания соединены соответственно со вторыми входами пятого и шестого блоков умножения, выходы четвертого, пятого; и шестого блоков умножения через второй сумматор соединены со входом объекта управления.. На чертеже представлена структурная схема предлагаемой системы управления. Система управления содержит пропорционально-интегрально-дифференциальный (ПИД) .регулятор 1, состоящий из интегратора 2, дифференциатора 3 и сумматора 4, корректирующие блоки, реализуемые на первом, втором и третьем блоках умножения 5-7, подключенный к об-ьекту управления 8 первого или второго порядка с переменным запаздыванием блок 9 измерения запаздывания, к выходу которого подключены функциональный преобразователь 10 и блок управления 11, служащий для перенастройки первого,второго и третьего блоков 12-14 регулируемого запаздывания, в зависимости от текущего значения временного запаздывания,, В системе может быть применено п блоков регулируемого запаздывания. Но достаточно иметь три блока. Блоки 12-14 соединены последовательно. Функциональный прео разователь 10 -служит для . формирования- сигналов ), Fj. (t) , ЕЭ (f) и Fj (3 , PI. (-г), Fj (т:) , где F () , FS,{T) , Fj (f) служат -для установки оптимальных коэффициентов динамической обратной связи корректирующих устройств блоков умножения 15-17, а сигналы F/ (тг) , Fa () и Fj СС) - для установки оптимальных коэффициентов для блоков умножения 5-7. Выход сумматора 4 соединен с положительны входом сумматора 18, а выходы блоко умножения 15-17 подключены к отрица тельным входам сумматора 18. На вхо Сумматора 4 поступает сигнал задани Uj, а на o6bej T управления 8 действует вoз тyщeниe. W(t) , Система управления работает след кхцйм образом. В интервале времени 0-t, равном интервалу запаздывания, объект неуправляем. В интервале f 4t 1,3 блок 9 измеряет фактичес кую величину запаздывания и сигнал, пропорциональный запаздыванию U(T), подается на блок управления 11, кот рый настраивает блоки 12-14 регулируемого запаздывания на запаздывани равные -|- ., Кроме того, сигнал U(T) одается на функциональный преобраователь 10, который формирует сигнаы F(t},P(t}, FjCC) и F;(f), Fa (Т), (г) . В указанном интервале Г t 1,3R формируется сигнал Ug,, равный К4 Uj, Где К - коэффициент усиления сумматора 4, а входной сигнал задания, чем обеспечивается форсированная отр.аботка сигнала рассогласования между сигналом задания и выходным сигналом объекта Уо. :На интервале| l, 1,66 IT начинает действовать отрицательная обратная связь. Сигнал, пропорцио- нальныйзначению управления .в момент , U(t --f) поступает через первый блок регулируемого запаздывания 12 на пятый блок умножения 15, где осуществляется .его умножение на коэффициент оптимальной обратной связи, соответствующий текущему значению . времени запаздывания. Сигнал, равный произведению U(t -|) F, (Т), поступает на отрицательный вход сумматора 18, чем обеспечивается уменьшение общего .коэффициента усиления. В интервале l, дополнительно включается вторая обратная связь, которая реализуется замечет использования сигнала U(t -3)f подаваемого н.а блок умножения 16, где умножается на коэффициент Fj (t) оптимальной обратной связи, а результирующий сигнал U(t --) Fji. (Г) подается на отрицательный вход второго сумматора 18. В этом интервале управления общий коэффициент усилия корректирующего устройства становится равным Кн 1-«-Ft С 1-1-Ра (О В интервале 2-t4t 2, 33гдополнительно включается третья корректирующая обратная связь, реализуемая за счет использования сигнала U(t -Т), который поступает на третий блок умножения 17, где умножаеа-ся на коэффициент оптимальной обратной связи FJ(f), а-результирующий сигнал U(t -IT) Fz(t} подается на отрицательный вход сумматора 18. На этом интервале управления общий коэффициент усилия корректирующего устройства равен , HF, U)Kaa)-t-lij(a 1 Таким образом, для любого, текущего значения 2 обеспечиваются оптимальные параметры настройки регулятора, и чем больше число используемых в системе блоков регулируемого запаздывания, тем точнее реализуется закон оптимального управления. Данная система автоматического управления является более устойчивой, чем известные,, обладает повышенной точностью и быстродействием. Кроме того, система позволит расщирить класс объектов управления, так как обеспечивает оптимальное управление по квадратичному критерию качества объектами, содержащими пере
менное запаздывание как в измерении, гак и в управлении, а также их комбинацию.
Формула изобретения
Система управления, содержащая блок измерения запаздывания, вход которого соединен с выходом объекта управления, первый, второй и третий блоки регулируемого запаздывания, первый сумматор, первый и второй входы которого соединены соответственно с выходом интегратора и дифференциатора, отличаюшаяс я тем, что, сцелью повышения усточивости и точности, она содержит второй сумматор, блок управления, блоки умножения и функциональный преобразователь, выходы которого соединены с первыми входами соответствующих блоков умножения, выход блока измерения запаздывания соединен со входом функционального преобразователя, а через блок управления с первыми входами первого, второго и третьего блоков регулируемого запаздывания, второй выход объекта управления через первый, второй и третий блоки умножения соединен соотйетственно со входами интегратора, дифференциатора и третьим входом первого сумматора, выход которого через послег довательно.соединенные второй сумматор, первый блок регулируемого запаздывания, второй блок регулируемого запаздывания и третий блок регулируемого запаздывания соединен со вторым входом четвертого блока умножения,
o второй вход и выход второго блока регулируемого заЪаздывания соединены соответственно со вторыми йходами пятого и шестого блоков умножения, выходы четвертого, пятого и шестого 5 блоков умножения через второй сум--матор соединены со входом объекта управления.
Источники информации, принятые во внимание при экспертизе
0
1.Эрриот П.Э. Регулирование производственных процессов, М,г Энергия , 1967, с.255,
2.Турецкий X, Анализ и синт.ез систем управления с запаздыванием,
5 :М. Машиностроение, 1974, c.2l4 (прототип),
{tj
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Адаптивная система управления потенциально опасным объектом | 1987 |
|
SU1513416A1 |
| Адаптивный регулятор с регулируемой обратной связью | 1985 |
|
SU1287104A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Адаптивная система управления потенциально опасным объектом | 1987 |
|
SU1423977A1 |
| Адаптивное регулирующее устройство | 1982 |
|
SU1064271A1 |
| Адаптивная система управления для объектов с запаздыванием | 1985 |
|
SU1310774A1 |
| Система регулирования объекта с запаздыванием | 1986 |
|
SU1397875A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Комбинированная система управления | 1987 |
|
SU1536352A1 |
