L/-
(Л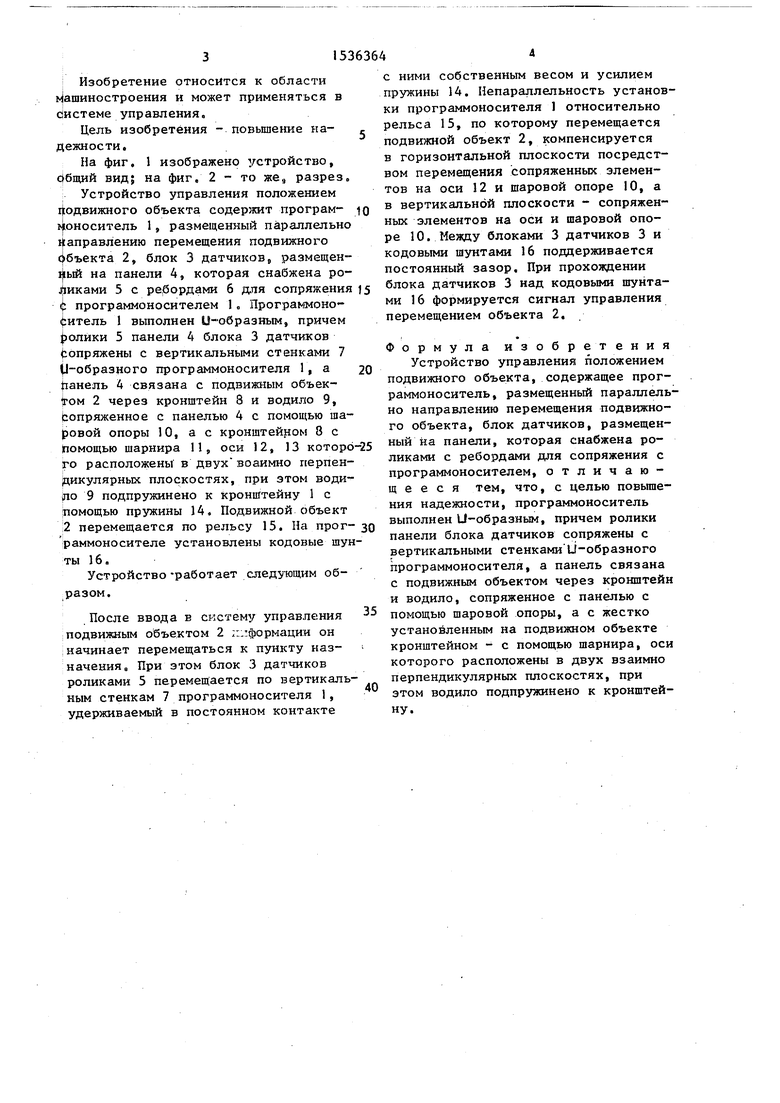
| название | год | авторы | номер документа |
|---|---|---|---|
| ОГРАНИЧИТЕЛЬ ПЕРЕКОСА ОПОР КРАНА МОСТОВОГО ТИПА | 1993 |
|
RU2061645C1 |
| ДВУХКОНСОЛЬНЫЙ ДОЖДЕВАЛЬНЫЙ АГРЕГАТ | 2002 |
|
RU2222184C2 |
| Программное устройство для автоматизированной поточной линии | 1973 |
|
SU477395A1 |
| НИЗКОУРОВНЕВЫЙ ТОКАРНЫЙ СТАНОК ПОДВИЖНОГО БАЗИРОВАНИЯ ДЛЯ ВОССТАНОВЛЕНИЯ КОЛЕСНОЙ ПАРЫ | 2021 |
|
RU2759101C1 |
| Автоматическая линия для нанесения гальванических покрытий | 1980 |
|
SU933822A1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2381985C1 |
| Дождевальная машина с торцевой подачей воды в движении двухзвенным шарнирным водозабором | 2021 |
|
RU2760852C1 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЙ КОЛЕС | 2021 |
|
RU2824533C1 |
| КРЕСЛО ЛЕТНОГО ЭКИПАЖА (ВАРИАНТЫ) | 2014 |
|
RU2620443C2 |

Изобретение относится к машиностроению и может быть использовано в системах управления. Цель изобретения - повышение надежности. Устройство управления положением подвижного объекта содержит программоноситель, блок датчиков, панель 4 с роликами 5 и ребордами 6. Повышение надежности достигается тем, что программоноситель 1 выполнен @ -образным, причем ролики 5 сопряжены с вертикальными стенками 7 программоносителя 1, а панель 4 связана с подвижным объектом 2 через кронштейн 8 и водило 9, сопряженное с панелью 4 с помощью шаровой опоры 10, а с кронштейном 8 - с помощью шарнира 11. 2 ил.
СП
00
сг со
О5 Јъ
Изобретение относится к области Машиностроения и может применяться в Системе управления.
Цель изобретения - повышение на- дежности.
На фиг. 1 изображено устройство, Общий вид; на фиг. 2 - то же разрез.
Устройство управления положением Подвижного объекта содержит програм- Доноситель 1, размещенный параллельно Направлению перемещения подвижного Объекта 2, блок 3 датчиков, размещен- 1)|ый на панели 4, которая снабжена роликами 5 с ребордами 6 для сопряжения t программоносителем 1 „ Программоно- Јитель 1 выполнен Ц-образным, причем ролики 5 панели 4 блока 3 датчиков Сопряжены с вертикальными стенками 7 -образного программоносителя 1, а данель 4 связана с подвижным объек- }гом 2 через кронштейн 8 и водило 9, (сопряженное с панелью 4 с помощью шаровой опоры 10, а с кронштейном 8 с Помощью шарнира 11, оси 12, 13 которо го расположены в двух воаимно перпендикулярных плоскостях, при этом води- до 9 подпружинено к кронштейну 1 с помощью пружины 14. Подвижной объект 2 перемещается по рельсу 15. На прог- раммоносителе установлены кодовые шунты 16.
Устройство -работает следующим образом.
После ввода в систему управления подвижным объектом 2 .. формации он начинает перемещаться к пункту назначения а При этом блок 3 датчиков роликами 5 перемещается по вертикальным стенкам 7 программоносителя 1, удерживаемый в постоянном контакте
5
0
с ними собственным весом и усилием пружины 14. Иепараллельность установки программоносителя 1 относительно рельса 15, по которому перемещается подвижной объект 2, компенсируется в горизонтальной плоскости посредством перемещения сопряженных элементов на оси 12 и шаровой опоре 10, а в вертикальной плоскости - сопряженных элементов на оси и шаровой опоре 10. Между блоками 3 датчиков 3 и кодовыми шунтами 16 поддерживается постоянный зазор. При прохождении блока датчиков 3 над кодовыми шунтами 16 формируется сигнал управления перемещением объекта 2.
Формула изобретения Устройство управления положением подвижного объекта, содержащее программоноситель, размещенный параллельно направлению перемещения подвижного объекта, блок датчиков, размещенный на панели, которая снабжена роликами с ребордами для сопряжения с программоносителем, отличающееся тем, что, с целью повышения надежности, программоноситель выполнен U-образным, причем ролики панели блока датчиков сопряжены с вертикальными стенками U-образного программоносителя, а панель связана с подвижным объектом через кронштейн и водило, сопряженное с панелью с помощью шаровой опоры, а с жестко установленным на подвижном объекте кронштейном - с помощью шарнира, оси которого расположены в двух взаимно перпендикулярных плоскостях, при этом водило подпружинено к кронштейну.
16
| Позиционная система программного управления перемещением транспортного механизма | 1973 |
|
SU480083A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Программное устройство для автоматизированной поточной линии | 1973 |
|
SU477395A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
